
















































































232
134
硬核DIYer日志 篇一:再也不担心罚抄100遍了?Arduino平台集大成之作:Dobot 机械臂 全网首拆
2018-01-26 18:25:00
169点赞
594收藏
126评论
嗨,大家好!我的Neo 。
。
上次和大家聊了目前六足机器人里做的比较好的HEXA:

很多值友看了之后都表示非常有趣,更有值友指出华硕路由器终于能动了!
但,也有不少值友指出,这款概念性产品,虽然很酷,但是实用性好像一般?
的确,作为开发性的产品,HEXA更多的还是给一些研究人员进行二次开发和改装。而对于我们日常生活来说,其实不太有需要用机器人去野外探险的使用场景,反倒是希望有一台智能设备来解决日常生活中的一些琐碎的劳动。
比如:罚抄课文100遍。
这时,一台多功能机械臂可能是更合适的。
然而,业内大厂比如ABB的机械臂,动不动就几万几十万的:

虽然功能强大,可靠性佳,但是实在太贵了。。。
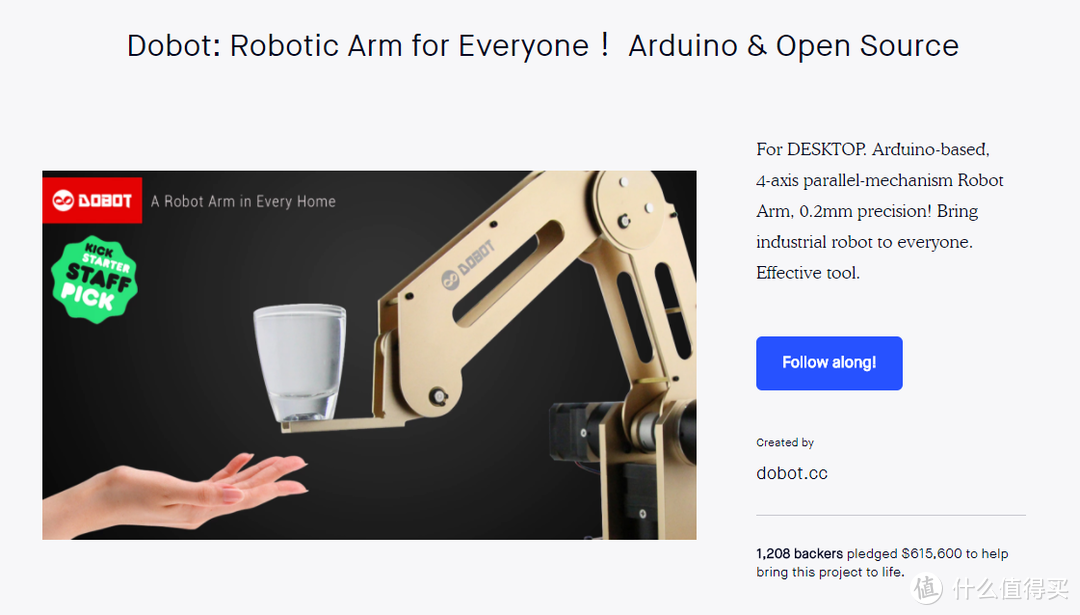
这时,一款“老”产品,来自Dobot的ARM,进入了我的视野:

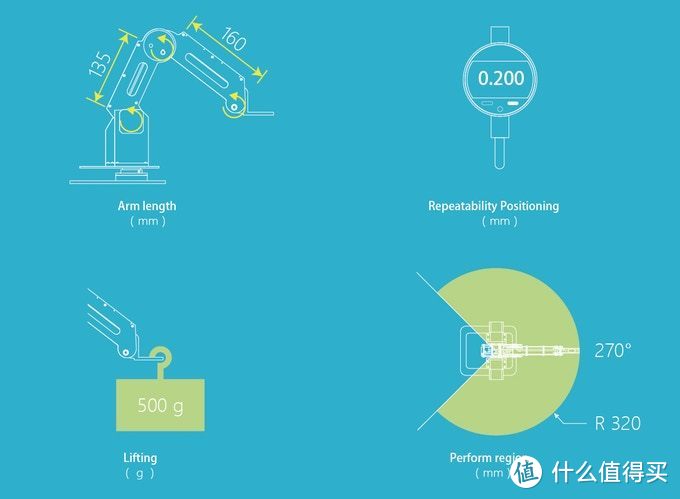
其实一直到今天,这款Dobot产品仍然还是在很多地方领先的:
比如超高的重复精度:
精细的步进电机控制:

华丽的激光雕刻一只功夫熊猫:
还有好看的配色:

更重要的是,便宜!
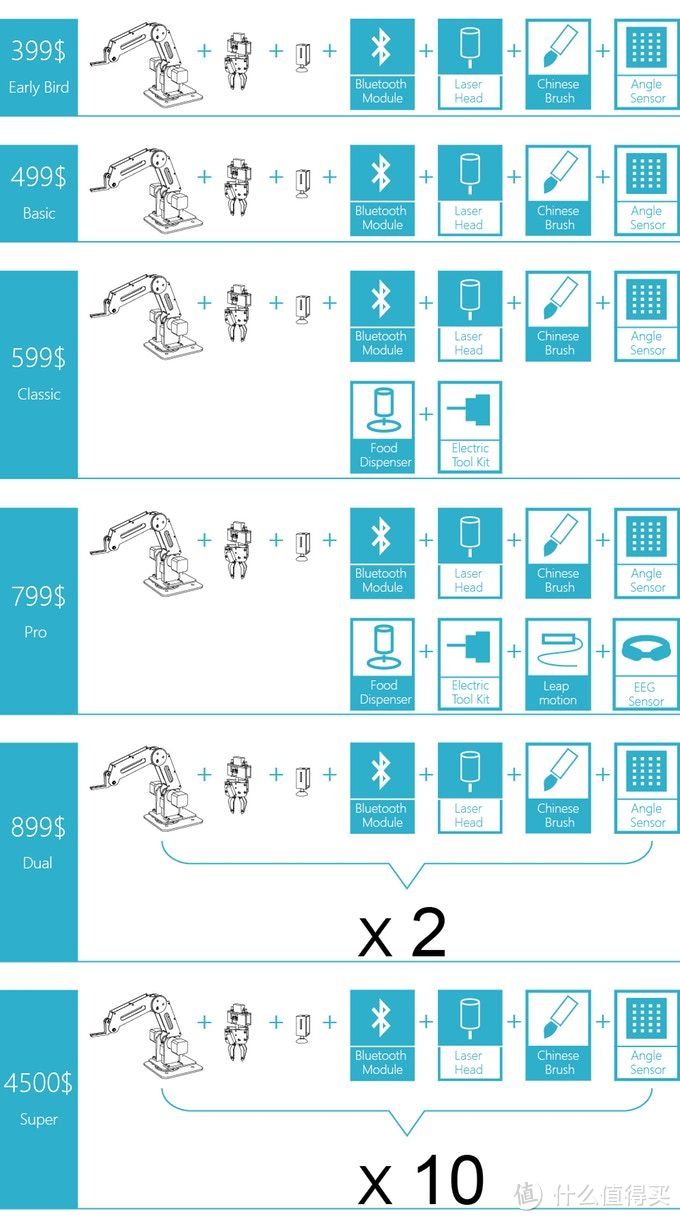
最早的首发价格在399美元,平均成交价在500-600美元左右,而且现在淘宝上的套件,基本稳定在2K5-3K的价位,对于这个级别的产品还是,其实还是挺低价了。
另外对于Neo我来说,其实更看重的倒不只是机械臂本身,而是Dobot背后的整个开源生态环境。只要能解构每一个软硬件节点,我们自己就可以做出一套完整的复刻系统,并且可以进一步二次开发,做出更完美的机械臂,我想这才是Dobot当然选择完全开源的初衷。
外观展示
因为我二手产品,我这里也就不来完整的开箱了,我们直接来看看机械臂本体,已经各个关键机构的组成。
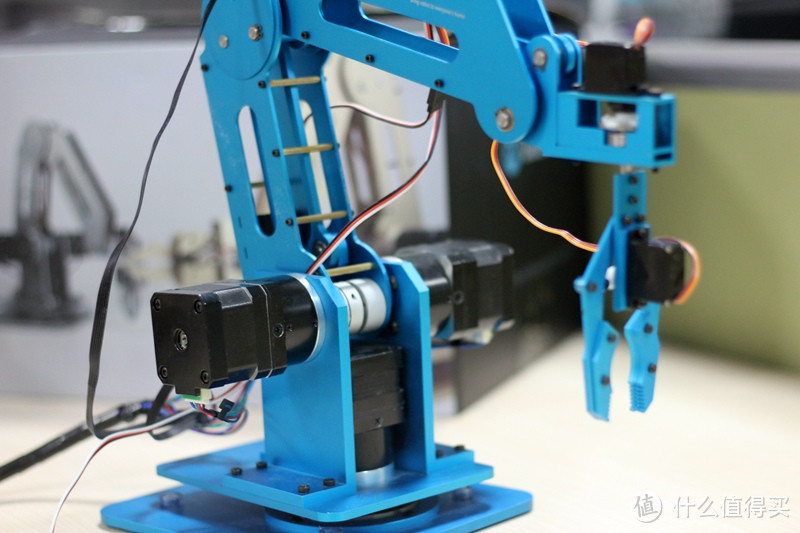
▼ 首先机械臂本身全蓝的配色,Neo我还是非常喜欢的,材料应该是6061铝合金,上色工艺貌似是iPhone同款的阳极氧化铝。颜值和做工拜手机行业的推动,还是很有保障的。
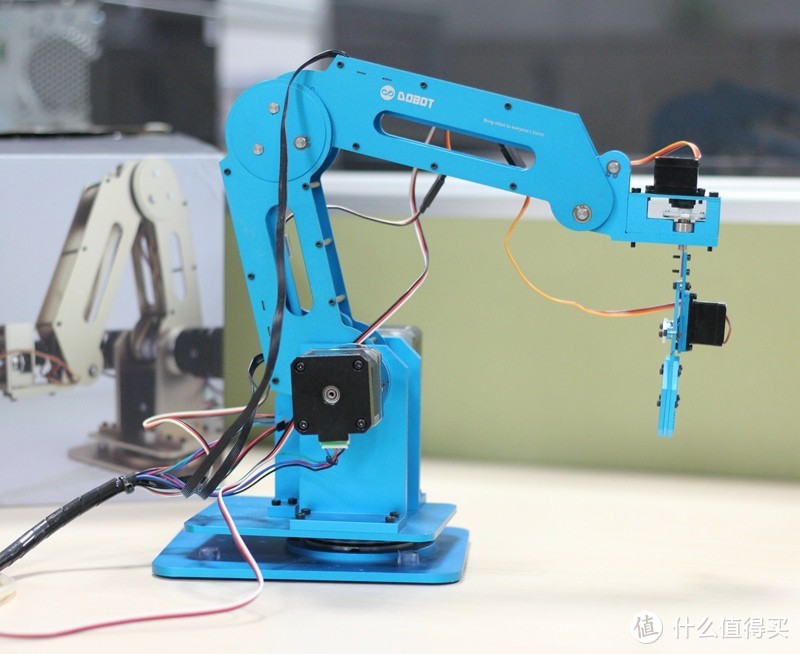
▼ 我估计Dobot的小伙伴们,应该也是参考了业内大佬ABB的设计,基本的结构其实还是挺接近的(走线、藏线什么的就有差距了)
▼ 标配的尾部套件“end effecter”是机械爪,其实这个套件是可以随意切换的,可以换成笔啦,激光头啦,甚至3D打印机,只有尺寸适配,都问题不大
▼ 比如官方的视频就换成的空气泵
▼ 甚至可以直接加装摄像头进行视频采集

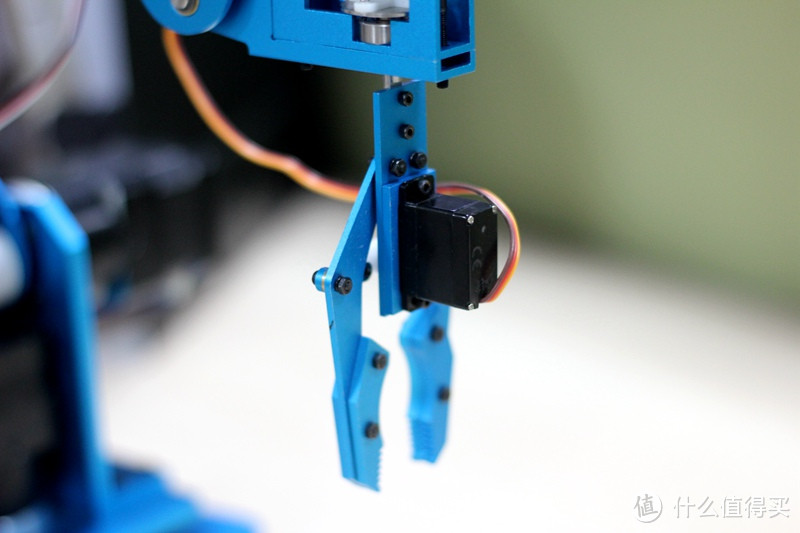
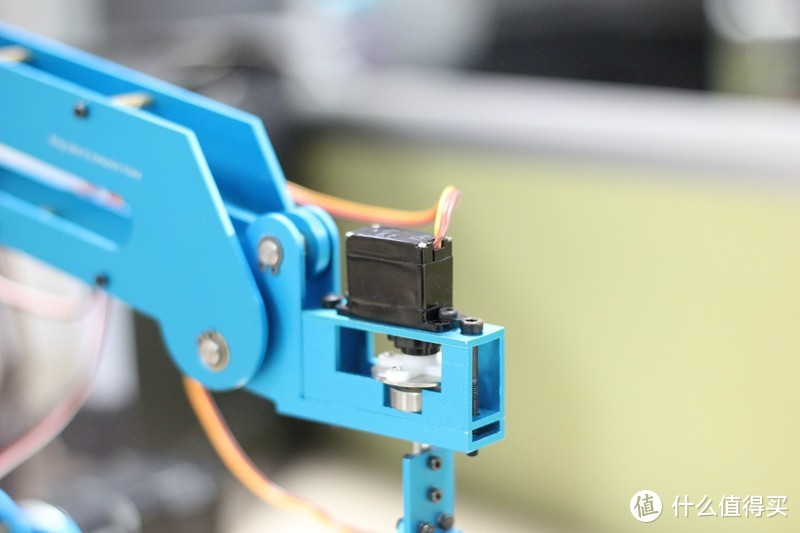
▼ 接下来,机械爪的上方是一个转角控制舵机,这样可以让机械爪随时调整不同的角度
▼ 这个舵机本身倒是不复杂,标准的三线接口,估计是串口通信
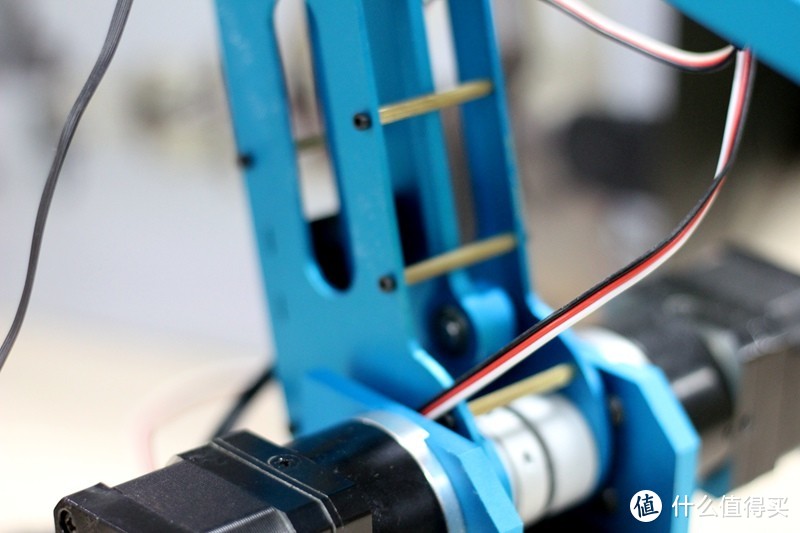
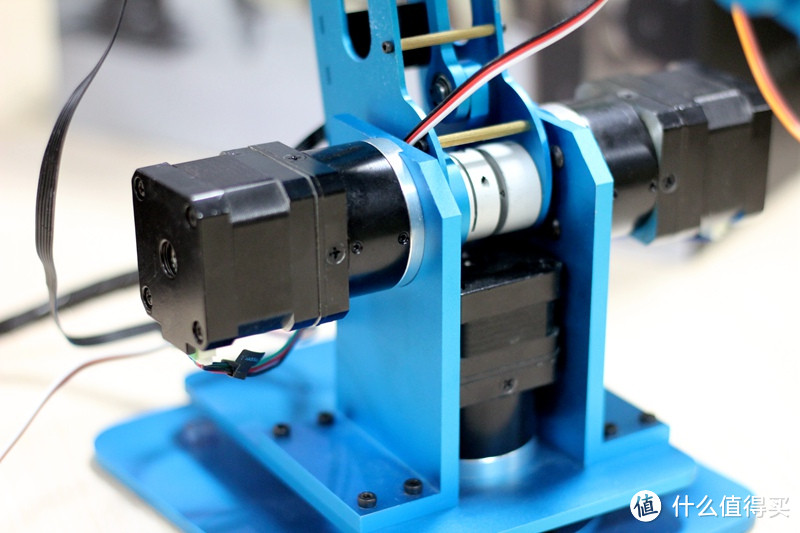
▼ 接下来就是重点的转折结构了
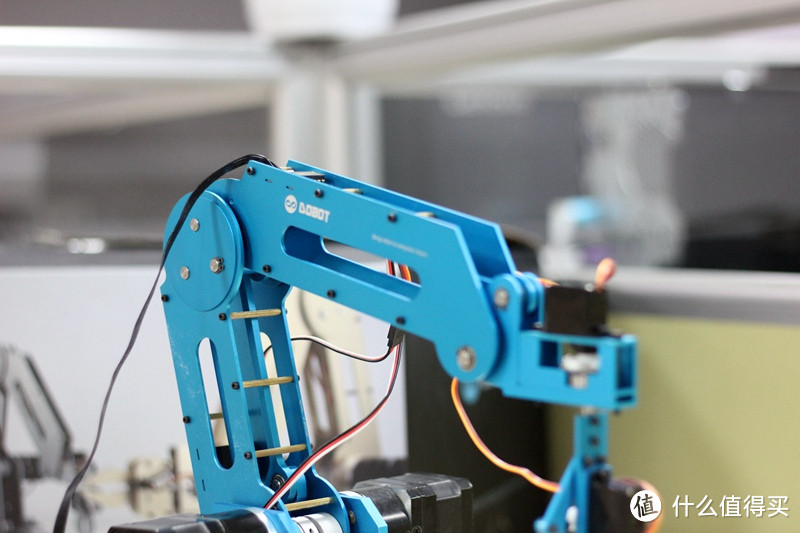
▼ 这里Dobot的设计还是挺注重结构力学的,核心的三个大电机,通过对称的方式装在机械臂底部,作为稳住重心的压舱石
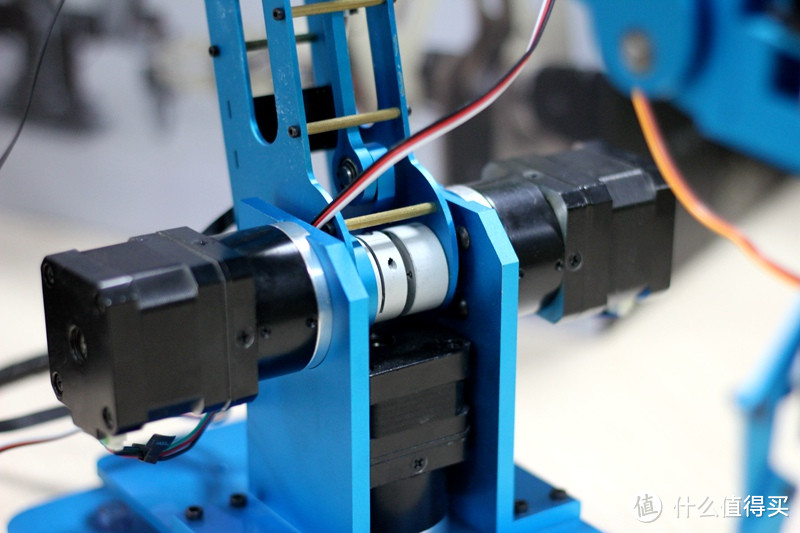
▼ 接着再通过传动装置,控制机械臂的各个关键转角
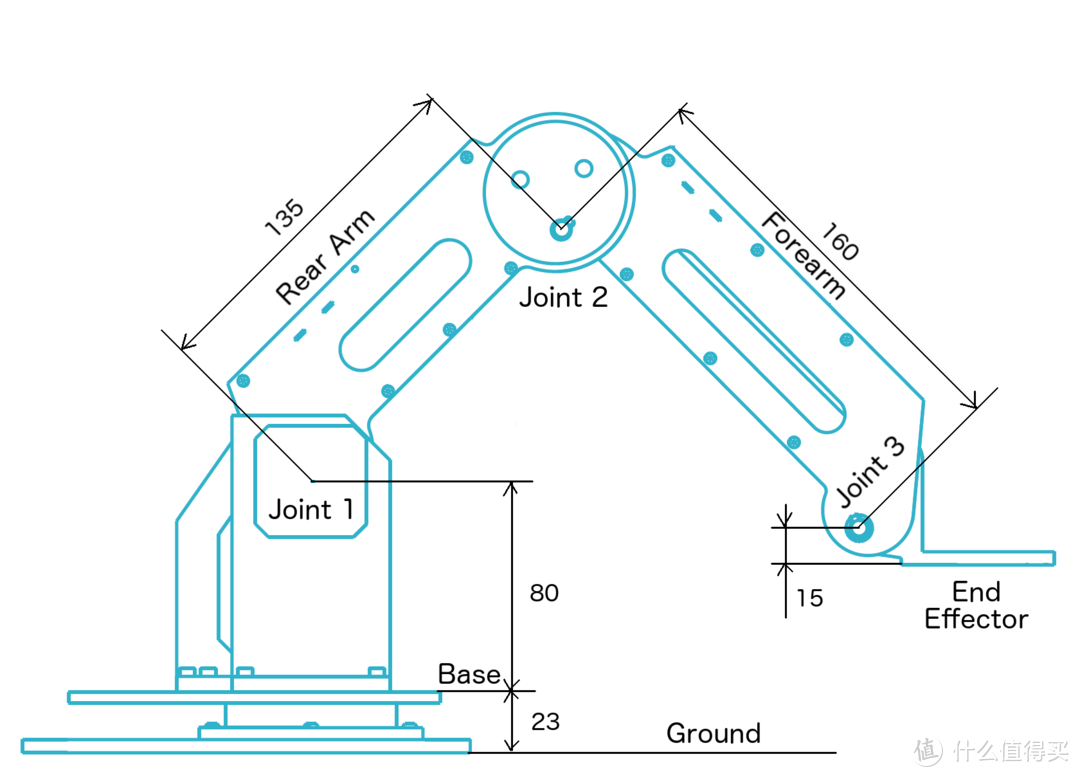
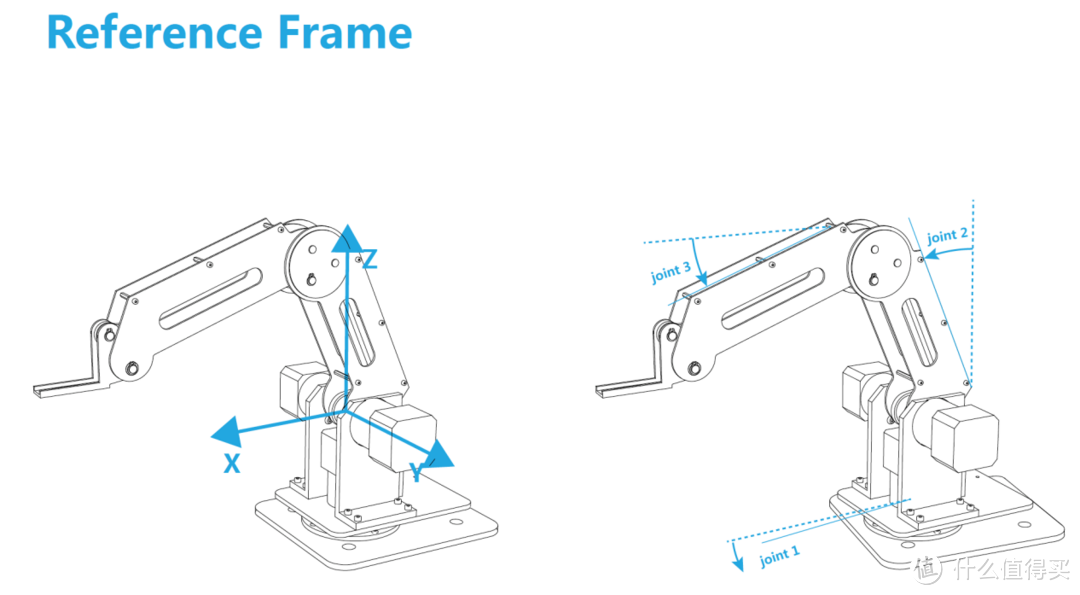
▼ 原理图应该就是这样的:
▼ 值得一提的是,每个电机都配备的行星减速器,从而保证了运行的稳定和产品的耐久度。
总体来说,这套产品的机械结构还是比较到位的,各个核心组件的选择、电机的配置、铝合金结构的做工用料,都属于上流水准。
硬件控制系统解析
不过如果仅仅拘泥于外观结构的展示,显然不是Neo我的全部实力。
▼ 我们再来看看这款机械臂的控制系统是怎么搭建的。先看尾部装置:
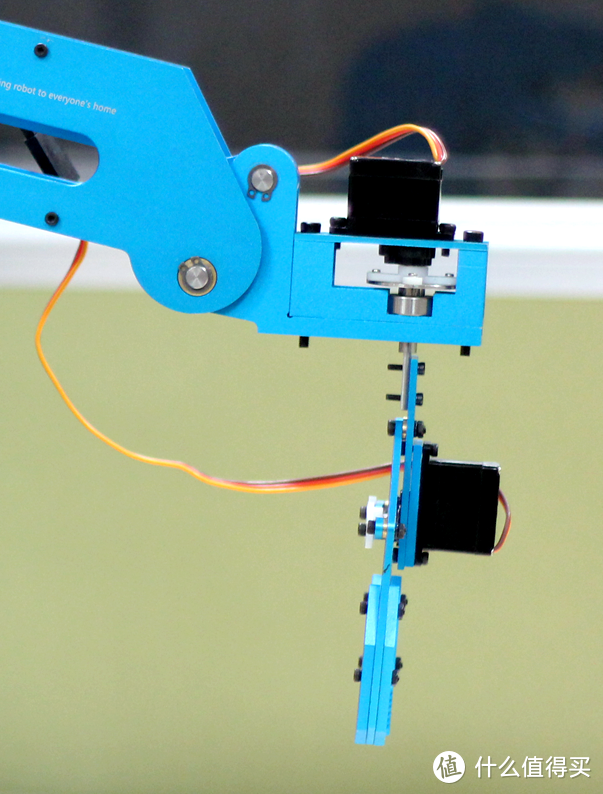
两个简单的舵机,一个控制旋转,一个控制机械爪的松紧。都是入门款3.7g舵机,不贵,20元不到一个。
▼ 位置传感器来自芬兰的专业厂商VTI双轴倾角传感器,型号应该是SCA100T,价格百元出头。
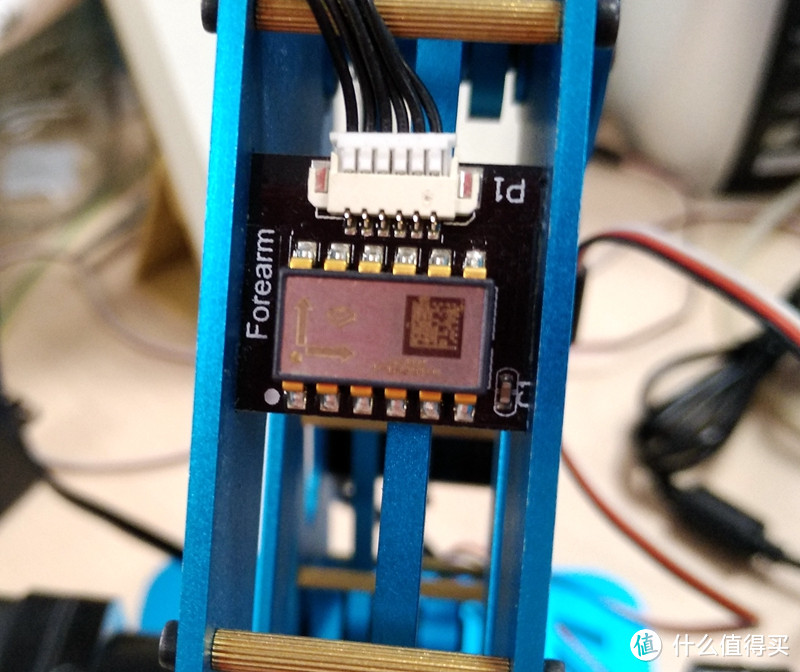
▼ 用途主要是把各个电机的转动坐标,转换成机械臂末端的XYZ坐标参数
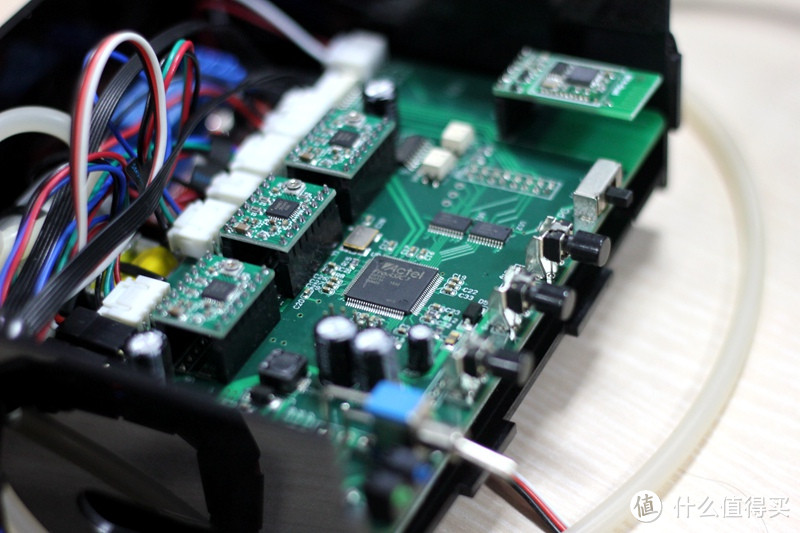
▼ 再来看看主控板部分
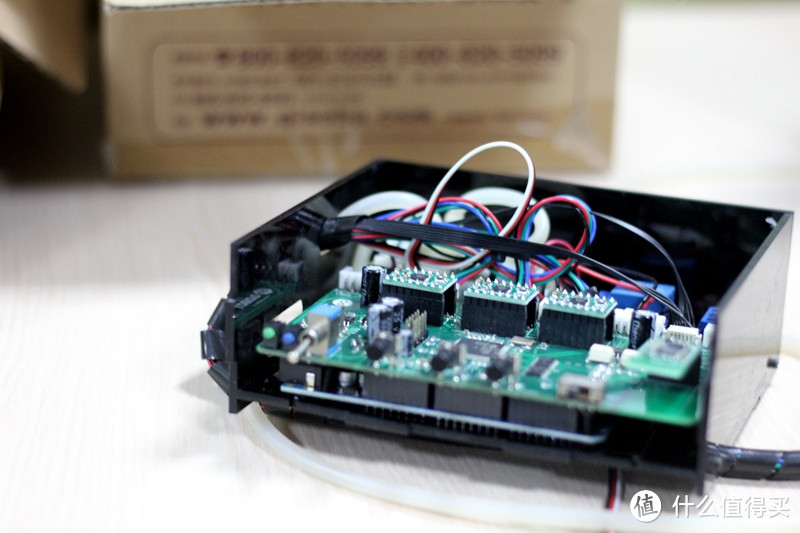
▼ 上层是一块FPGA板,成本大概500元,代码不好估价
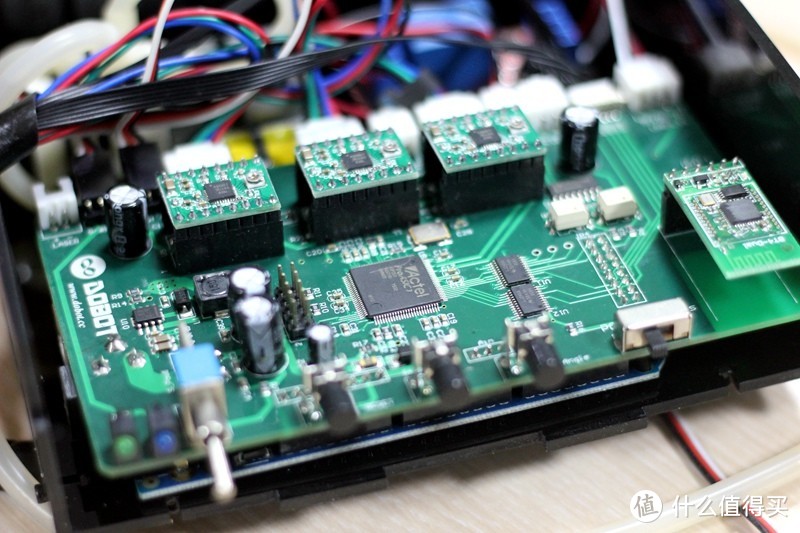
▼ 左侧三个小板都是电机驱动板,对应三个主电机;右上角则是蓝牙扩展板,用于和手机连接
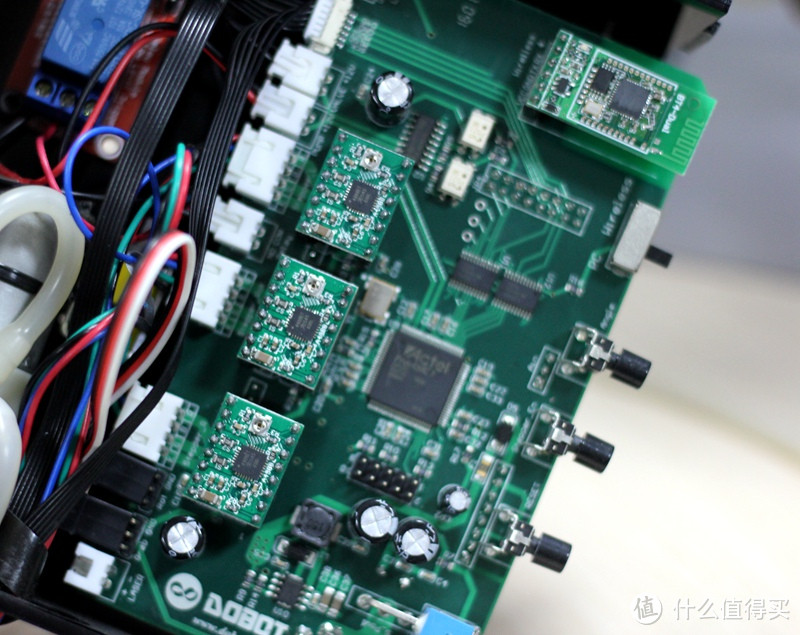
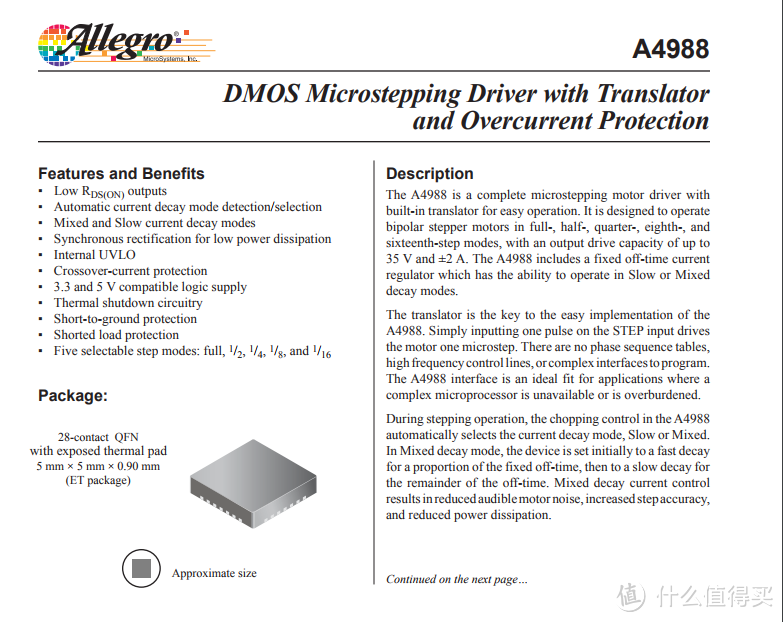
▼ 驱动芯片是常见的A4988,驱动电路2A,看来带不动大电机,贵在便宜(几块钱一颗)
▼ 左侧是一个电源开关和几个调试按钮,常用的就是开关和复位按键
▼ 再来看看底板,熟悉的Arduino嘛!

▼ 具体来说是Arduino中的高端货2560,市价200多,算是下了本了

▼ 这块板的最大优点就是接口全,并且完美兼容Arduino的开源软件平台

▼ 自带USB转串口功能,直接连电脑上的USB接口就是收发信号和调试了,确实方便

▼ 底面的涂装也还是挺带感的

▼ 至此,整个控制系统的原理基本也展现在我们眼前了。电脑通过USB和控制器连接,Arduino进行交互之后,再和FPGA板通讯,由FPGA发信号给5个电机,实现具体的操作
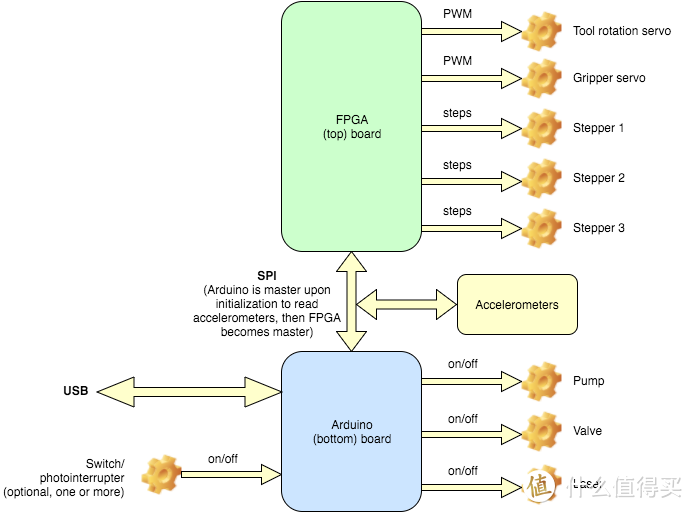
▼ 整个机械臂的硬件性能,则是刚好配合的电机本身的实力,并且最大化的实现了重复精度
总体来说这套系统的配置还是比较豪华的。光控制板的硬件成本就在千元左右,整体成本估计靠2K,买个3K多,算上研发和运营成本,几乎不赚钱了。
软件控制
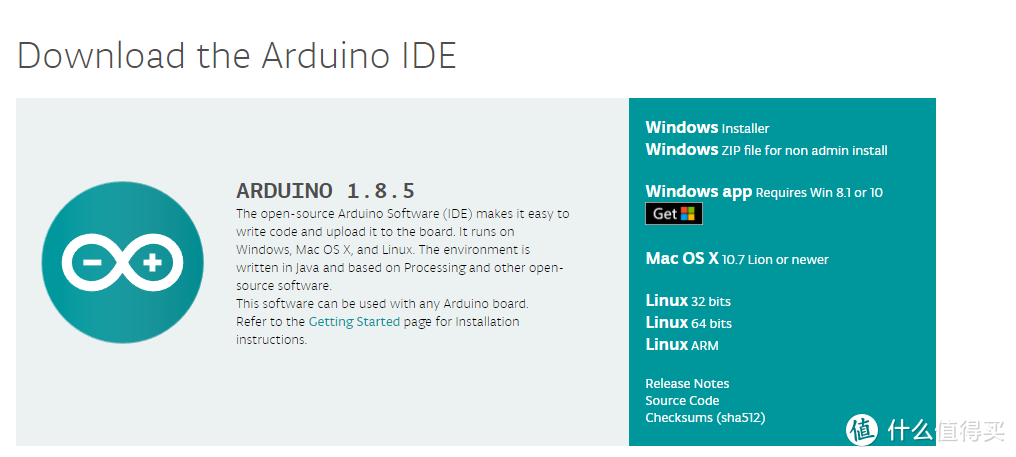
接下来软件部分,则是比较常规了。基本就是原版开源的Arduino控制软件,通过Qt实现。
▼ 先去Arduino官网下载标准的IDE
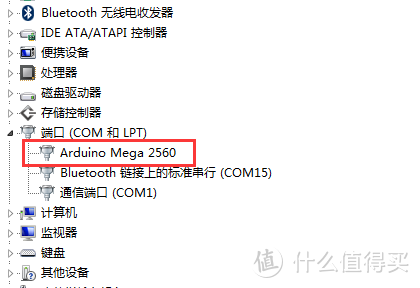
▼ 接着连接设备,自动安装驱动
▼ 然后打开软件

不过这时候,问题也出来了。这个软件实在是有点简陋啊!!!主要的功能就是实现机械臂的上下左右移动,而官方演示的各种功能?不好意思,你自己慢慢调吧!!!
▼ 具体我们来看个视频:
这里我们基本可以看到两点:
机械臂的控制确实还是挺准的,各类演示视频也的确是可以实现的,但是:
实现起来并不容易,还需要用户自己各种调试,并且把传感器位置参数保存下来,才能让机械臂重复运行相同的动作。
所以开发难度并不低。
总结
总体来说,Dobot的这款机械臂产品,可以说在3K价位做到了用料奢华,设计合理;但短板显然是软件方便显得比较简陋。
这就表示对于用户来说,还是需要有自己的想象力。好在目前这套PC套件,已经可以让用户抛开编程代码本身,直接通过遥控的方式来设计机械臂的动作,门槛比传统的机械臂开发确实降低了不少。

而Neo我也注意到Dobot也在官网推出了更新的“魔术师”,看上去似乎更加强大了(价格也贵了)

好了,这次Dobot机械臂的深度拆解和技术分析就为大家介绍到这里。后面Neo我就得找时间来研究研究怎么玩出更酷炫的应用实例了。也希望大家不吝在评论区提出意见和建议。
另外,如果大家对DIY感兴趣的话,我们还可以聊聊如何自己低成本的制作一台颇具可玩性的机械臂。我是Neo,我们下次见!
小编注:本文作者@沈少Neo是什么值得买首席生活家,他的个人自媒体信息为:
新浪微博:沈少Neo,微博地址(http://weibo.com/neoshen)。
扶持推广个人品牌是生活家新增福利,更多详细内容请看生活家公告(https://news.smzdm.com/p/26967/)。欢迎大家踊跃申请生活家,生活家中表现优异的用户还将有机会成为『首席生活家』,欢迎有着特别生活经验的值友们踊跃加入生活家大家庭!
















青冰白龙
校验提示文案
夜行动物__
校验提示文案
BooKer-DeWitt
校验提示文案
有个值友
校验提示文案
最登峰
校验提示文案
abrams2415
校验提示文案
阿猫阿狗丶
校验提示文案
学习态度
校验提示文案
dice1412
校验提示文案
大型喵科动物
校验提示文案
望京十三少
校验提示文案
yzkyzk
校验提示文案
手抓饼狂魔
校验提示文案
猫皮
校验提示文案
逝去岁月
校验提示文案
优雅的蛋淡
校验提示文案
Hydjan
校验提示文案
被迫换昵称
校验提示文案
薛定谔的牛
校验提示文案
疯狂星期天
校验提示文案
Sky-walker
校验提示文案
奔腾inside
校验提示文案
疯狂星期天
校验提示文案
Leopord_H
校验提示文案
卷毛504
校验提示文案
anypaul
校验提示文案
薛定谔的牛
校验提示文案
薛定谔的牛
校验提示文案
被迫换昵称
校验提示文案
正方形中年少女
校验提示文案
买不买看我
校验提示文案
老狸猫等你来
校验提示文案
Hydjan
校验提示文案
晓飞影
校验提示文案
优雅的蛋淡
校验提示文案
优雅的蛋淡
校验提示文案
买青椒也用券
校验提示文案
逝去岁月
校验提示文案
monkeyzmk
校验提示文案
草草草草草
今年和央视春晚合作有机器人写春联的,搜绝对儿春联就有,免费写了送,还包邮哦,机器人写的春联,挂出去拉不拉风!
校验提示文案