


























































































232
134
用实战对决来见证效率!NEATO D8000 VS 小米扫地机器人评测
2016-12-07 15:51:45
484点赞
485收藏
270评论
(FIB WARNING:本文有相当多的两台扫地机器人的实地清扫动图,请注意流量)
NEATO!凭其SALM智能激光制导系统的扫地机器人与IROBOT并为世界双雄!
小米! 用其生态链企业寨尽一切的高品质生产商,米家扫地机器人以低价高效而获得无数口碑!
今天! 我们将让两者同场竞技,让其浴血同争,看谁孰强孰弱!
 美国俐拓(neato robotics)智能擦地拖地扫地机器人吸尘器 BV-D8000美国NEATO来自硅谷,是扫地机器人中的高端品牌。采用谷歌无人车制导技术,自带RPS绘图房间定位系统,会在清扫前先感应生成房间的数字地图,以直...
美国俐拓(neato robotics)智能擦地拖地扫地机器人吸尘器 BV-D8000美国NEATO来自硅谷,是扫地机器人中的高端品牌。采用谷歌无人车制导技术,自带RPS绘图房间定位系统,会在清扫前先感应生成房间的数字地图,以直... 米家(MIJIA)扫地机器人 小米扫地机器人 智能规划路线吸尘器 智能自动 ...米家扫地机器人,采用了日本原装进口NIDEC无刷风机,最大额定风压1800Pa;分段式集尘密封风道,兼顾了吸力以及低噪音。主刷头采用浮动设计,增强...
米家(MIJIA)扫地机器人 小米扫地机器人 智能规划路线吸尘器 智能自动 ...米家扫地机器人,采用了日本原装进口NIDEC无刷风机,最大额定风压1800Pa;分段式集尘密封风道,兼顾了吸力以及低噪音。主刷头采用浮动设计,增强...
——————————————上面有点中二了哈————————————————————
第一节:静态对比。

NEATO D8000半圆矩形,直角的前端方便清理墙角(官方宣传)
米家扫地机器人,拥有者irobot的外形和Neato的工作方式。

两边的激光测距传感器几乎在同一位置,以及前端的撞击缓冲头。
 以及同样高出平面的激光扫描传感器和充电触点。neato的排气孔在充电触点的中间,而小米机的在两边。
以及同样高出平面的激光扫描传感器和充电触点。neato的排气孔在充电触点的中间,而小米机的在两边。
 因为Neato并不支持无线操作,所以要比小米机多出一个小显示屏。(激光扫描头的右边。Neato的定时打扫,时间设定等都在这里进行)
因为Neato并不支持无线操作,所以要比小米机多出一个小显示屏。(激光扫描头的右边。Neato的定时打扫,时间设定等都在这里进行)
 两者均为上掀取灰尘盒。Neato尘盒是与上盖一体的,米家则是单独的。
两者均为上掀取灰尘盒。Neato尘盒是与上盖一体的,米家则是单独的。
就尘盒来说,Neato的要大小米机大概四分之一到三分之一的样子。
 倒垃圾的方式有所不同,Neato是取下滤芯。小米机则可以两边都打开。
倒垃圾的方式有所不同,Neato是取下滤芯。小米机则可以两边都打开。
正常使用时两边都打开其实并没太多必要。每次清理时都会要取下滤芯敲掉黏在上面的灰尘。
另外同为高效滤芯的情况下Neato的滤芯要更厚(能过滤0.3微米的尘埃)。
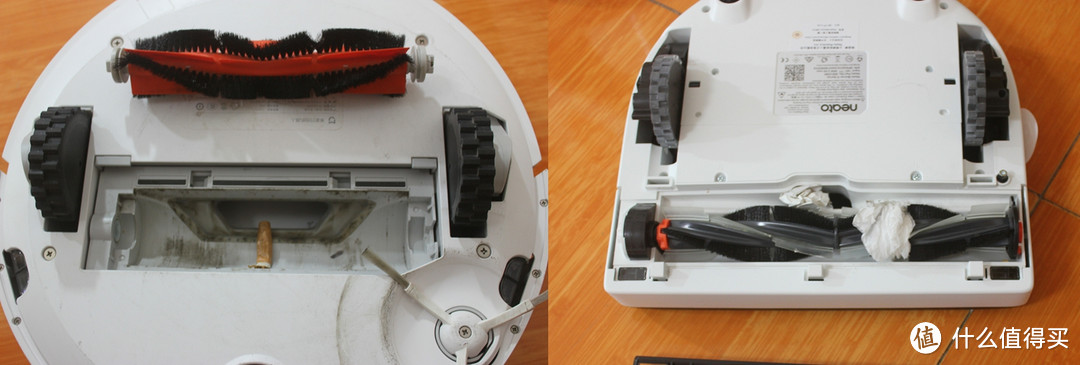
 底部的区别较大。Neato的滚轮在最前方。能更有效的吸收灰尘。边刷和滚刷基本在同一直线上,直接能把边角的垃圾扫入吸尘口。
底部的区别较大。Neato的滚轮在最前方。能更有效的吸收灰尘。边刷和滚刷基本在同一直线上,直接能把边角的垃圾扫入吸尘口。
小米机的滚刷在中间,因为体型的限制,只有在中间才能获得最长的吸入空间。同时也由于受到驱动轮的限制,会导致吸入效率比Neato低。在后面的实战中也能证明这点。
 同样也由于体型原因,小米机的边刷要大Neato很多。这也会带来一个缺点,过大的运动周长会把垃圾扫的很开(这是两者对比的情况下,不否认小米机的清洁效率还是很高的)。
同样也由于体型原因,小米机的边刷要大Neato很多。这也会带来一个缺点,过大的运动周长会把垃圾扫的很开(这是两者对比的情况下,不否认小米机的清洁效率还是很高的)。
 Neato的滚刷要明显长于小米机的,几乎是后者的一倍。另外Neato去下滚刷之前需要先取下边刷。边刷是由磁力固定。很容易更换。
Neato的滚刷要明显长于小米机的,几乎是后者的一倍。另外Neato去下滚刷之前需要先取下边刷。边刷是由磁力固定。很容易更换。

 两者的充电座,除了在形状上略有区别外,从结构上来说几乎是一样的。真不知道是谁抄袭谁的(此处应有明知故问脸)
两者的充电座,除了在形状上略有区别外,从结构上来说几乎是一样的。真不知道是谁抄袭谁的(此处应有明知故问脸)
耗材对比:
 XV系列通用宠物降噪一体毛刷 不清楚型号请联系在线客服
XV系列通用宠物降噪一体毛刷 不清楚型号请联系在线客服 米家扫地机器人主刷
米家扫地机器人主刷就胶毛一体的滚刷来说··这个价格差有点····
 【买2片减4元】BV系列通用HEPA滤网 1片装
【买2片减4元】BV系列通用HEPA滤网 1片装 米家扫地机器人尘盒滤网
米家扫地机器人尘盒滤网但是滤网的价格却又不一样,Neato D8000买两片还能更少···
 Neato美国智能扫地机器人虚拟墙 磁条 边界条 全系列型号通用2M
Neato美国智能扫地机器人虚拟墙 磁条 边界条 全系列型号通用2M 米家扫地机器人虚拟墙
米家扫地机器人虚拟墙 虚拟墙价格相差不是太大。
另外Neato有第三方耗材买,价格很便宜,但是没有使用过,效果不做评论。
 万创适配NEATO botvac系列70E 75 80 85扫地机配件边刷过滤网抹布
万创适配NEATO botvac系列70E 75 80 85扫地机配件边刷过滤网抹布
总结:
从上面对比上来看,米家扫地机器人是披着irobot的外型装着Neato的心。
那么在这种情况下,面对同一环境中二者的清理效率如何呢?请看第二节
第二节:实战测试


先解释下场景,把清扫范围限制在我家主客厅。然后人为的设置了若干障碍。垃圾主要为决 明子(颗粒状,光滑,较重),纸团(清风大号抽纸,有两张一团和单张一团的),硬纸团(两张叠一起的银行回执单)。
图中的玩具挖机,很轻很轻,可以随意推动,可以用这里记录扫地机的路线和激光测距的准确度

玩具箱和垃圾桶以及小板凳的间隔正好比两台扫地机器人窄一点点,但是垃圾桶扫地机器人推不动,小板凳就可以轻易的推着走,小板凳和垃圾桶之间留有一个半的扫地机器人的身位。三者之间有垃圾(决明子),用来测试扫地机的智能寻路以及激光测距的灵敏度

玩具箱和垃圾桶以及小板凳的间隔正好比两台扫地机器人窄一点点,但是垃圾桶扫地机器人推不动,小板凳就可以轻易的推着走,小板凳和垃圾桶之间留有一个半的扫地机器人的身位。三者之间有垃圾(决明子),用来测试扫地机的智能寻路以及激光测距的灵敏度
 夹角垃圾,用来测试夹角清理程度(测试D8000的时候决明子都要比小米机测试的时候多很多·····)
夹角垃圾,用来测试夹角清理程度(测试D8000的时候决明子都要比小米机测试的时候多很多·····)
 边角垃圾,用来测试两台机器人对于墙边的清理效果
边角垃圾,用来测试两台机器人对于墙边的清理效果

电视柜,下方有大量电线以及“垃圾”,用来测试两台机器人防缠绕的同时清理效果。
场景解释完之后开始准备实地测试了。
测试全程录了视 频。由于视 频内容比较大(均有2-3G)所以就不上传了,只截取过程动图然后看结果。
首先,根据小米机器人的APP显示,清扫面积13平,用时15分。而neatoD8000在同面积下用时19分。

从小米这个清扫地图上可以看出,电脑椅这块,基本是围绕每只凳脚的滚轮进行清扫。玩具箱这边,垃圾箱和玩具箱也是环绕清扫,至于小板凳和玩具挖掘机···两台扫地机都是看不到似得。
补充说明:(由于拍完小米机清扫,预览完视频后没有把手机调整到合适位置,导致角度有点问题。看不到D8000的最开始工作情况所以有些只能口述或者图片展示了。)
测试开始:
首先从小米开始测试。13平米的房间两台扫地机器人都是是分为两个区域进行清扫,但是具体的方式却有不同。

通过手机启动清扫后,小米机器人先在原地转了一圈,用激光扫描周边环境,然后发现了Neato D8000这个不世之敌,在手上没有武器的情况下,他只能使出撞击这一伤敌一千自损八百的招式···(大误,此处需要划掉)
刚开始的小米机器人的加速撞击,我都替D8000吃疼····
与小米启动后左转开始不同,D8000原地扫描完后是从右边开始进行区域打扫(此处没拍到,只能口述了)


紧接着就钻进了电视柜底部,无视众多的电线直接碾压进去出来,丝毫没有缠绕。
(由于视频中看不到D8000故也只能用图片替代)
D8000要略高于小米机,所以激光传感器会卡在外面,整个电视机柜只有D8000的前半部进去,也因为进去够深 ,所以电视机下面的决明子都清理干净了,同时没有遇到缠绕情况。
,所以电视机下面的决明子都清理干净了,同时没有遇到缠绕情况。

然后沿着茶几边一直推到沙发这里,因为沙发脚有高度却又不够小米进去所以,小米机器人一直不停试图往里的钻··
而对于D8000也会进行类似的碰撞,但是频率和力度要低于小米机很多。


左边的小米机推完沙发边后直接进入了玩具区,并把中间的决明子清扫的干干净净,然后试图从垃圾桶和玩具箱中通过,重重的撞击了一下发现过不去直接绕道。
而D8000也通过碰撞确定是否能推动障碍物,同时还清扫了一个纸团。另外由于体型的原因,小空间内没有小米机掉头灵活,而且尾端也有被翘起了。

小米机试图从另外一端钻进玩具箱和垃圾桶的间隙无果后,沿着玩具箱一路撞击确定分界线之后走开了(整间房,以玩具箱的位置为中间进行了分区清扫。)
而D8000虽然也是进行分区打扫(范围和小米机差不多),但是没有像小米机这般先画出明确的范围,是在启动之初扫描房间的同时就规划好了清扫路线,并在行进中进行修正,算法上来说D8000要优于小米机很多。所以在差不多的时间内,D8000打扫了两至三遍,小米机只有一遍。且D8000的耗时只比小米机多4分钟。


行驶到墙角,小米机开始往回走,边刷把决明子一路从墙边扫开,然后吸尘器吸走大部分,另一部分被扫在了出来,后面的清扫时会清理干净。也因为小米机的边刷较大,所以决明子扫出的范围比较广,有可能会导致扫出的垃圾扫到其他难以打扫的位置去。
墙边打扫,D8000要比小米机优秀很多,扫出的决明子很少,绝大部分都已吸收。

然后往回走,看到D8000或许觉着不顺眼又狠狠的来了一下··(大误,此处需要划掉)
至此小米机已经划分好第一个清扫范围(非直线区域通过碰撞确定范围),开始进行范围内清扫。
 在区域内来回清扫,此时范围内障碍物已经探明,碰撞很少发生了。
在区域内来回清扫,此时范围内障碍物已经探明,碰撞很少发生了。

 至于怎么对待这台挖机··两台扫地机器人的行为都差不多,D8000看上去要稍微温柔点?
至于怎么对待这台挖机··两台扫地机器人的行为都差不多,D8000看上去要稍微温柔点?


对于一张清风的面巾纸团,小米最后都没有吸入灰尘盒内(总共三个纸团,小米吸走了一个)
同样是一张面巾纸团,D8000 吸收得很好。(三个面巾纸团,D8000只剩下一个大的没吸走)


对于电脑椅的五只脚的空隙,小米机都尽其可能的进行了打扫。
而D8000由于体型的原因,明显在凳脚的缝隙里明显转不过身来。
 墙角的清扫(小米机没有做记录),D8000清理了大部分(整个清扫现场,D8000需要清扫各个位置的决明子要比小米机的多很多)直线型的外型确实要比圆型的小米机更适合清理墙角。
墙角的清扫(小米机没有做记录),D8000清理了大部分(整个清扫现场,D8000需要清扫各个位置的决明子要比小米机的多很多)直线型的外型确实要比圆型的小米机更适合清理墙角。
接下来看看结果(左为小米,右为D8000)
 由于D8000是近距离拍摄所以显得比较多。其实小米留下的决 明子的数量和范围都要大于D8000,只是拍摄距离较远看不清罢了。而且D8000清理过后主要是瓷片凹槽中卡住的决 明子居多。
由于D8000是近距离拍摄所以显得比较多。其实小米留下的决 明子的数量和范围都要大于D8000,只是拍摄距离较远看不清罢了。而且D8000清理过后主要是瓷片凹槽中卡住的决 明子居多。
 墙边的清理程度两台机器都做得非常好,不过D8000依然要优于小米机。
墙边的清理程度两台机器都做得非常好,不过D8000依然要优于小米机。
 对于墙角,小米机要优于擅长直角边的D8000,虽然D8000测试的时候决明子多了几倍。但是还余下这么多实在不应该。
对于墙角,小米机要优于擅长直角边的D8000,虽然D8000测试的时候决明子多了几倍。但是还余下这么多实在不应该。
 对于凳脚,小米依然要好于D8000,不过小米这边决 明子依然散的比较开。至于D8000,大家从动图里面能看到,他能接触到的基本已经打扫干净,因为体型限制接触不到也木有办法的···
对于凳脚,小米依然要好于D8000,不过小米这边决 明子依然散的比较开。至于D8000,大家从动图里面能看到,他能接触到的基本已经打扫干净,因为体型限制接触不到也木有办法的···
 就两者的灰盒来说,大很多的D8000的灰尘盒里面的垃圾要多余小米机,测试前所有的垃圾里,只剩一个大的纸巾团没有清理。而小米机只清理了一个纸团,还有两个纸团和一个硬纸团没有清理。
就两者的灰盒来说,大很多的D8000的灰尘盒里面的垃圾要多余小米机,测试前所有的垃圾里,只剩一个大的纸巾团没有清理。而小米机只清理了一个纸团,还有两个纸团和一个硬纸团没有清理。
 D8000的滤芯。折服于强大吸力面巾纸已经成为碎屑了。在清扫时也能明显的感觉到同时标准模式下D8000的强大吸力,这个是要大于小米机很多很多,当然噪音也相应的要大一些。但是这机器人工作的时间不都是设定在家里可能会没人的时候么?这时候噪音需要让位效率了。
D8000的滤芯。折服于强大吸力面巾纸已经成为碎屑了。在清扫时也能明显的感觉到同时标准模式下D8000的强大吸力,这个是要大于小米机很多很多,当然噪音也相应的要大一些。但是这机器人工作的时间不都是设定在家里可能会没人的时候么?这时候噪音需要让位效率了。
 烟 头被也没有被吸进去,从而被卡在滚刷槽内,而D8000则被一张面巾纸缠绕。硬纸团由于体积较大被卡在D8000的吸入口中。
烟 头被也没有被吸进去,从而被卡在滚刷槽内,而D8000则被一张面巾纸缠绕。硬纸团由于体积较大被卡在D8000的吸入口中。

整体来说,这次两台机器人清洁完之后,清洁效果都很好。从各种垃圾的残留来看NEATO D8000的效果要好于米家扫地机器人。对于摆设物体(小板凳,玩具挖机)移动范围NEATO D8000也要小于米家扫地机器人。
好了,到这里评测结束,最后的总结开始了
最后的总结

NEATO D8000
优点:优秀的算法和精确智能的激光导航系统。使得在差不多的时间内D8000能比小米机多清扫一遍房间。强大清扫能力和吸力能保证清扫的效率和结果。作为一台扫地机器人来说确实难以出其右。可更换配件多。甚至电池都能更换,这使得D8000的寿命大为延长。
缺点:没有接入WIFI,不能连接手机进行远程操作,也不能如同小米机一般有清扫机记录和耗材损耗。虽然只需要初次设定好就基本不用人工干预,但是免不了偶尔还是需要在非设定时间进行打扫。原装滚刷太贵,太贵!
米家扫地机器人
优点:漂亮的设计,结合了irobot和neato的优点。不俗的清扫能力,算法也有要优于市面上大多数扫地机器人。超高的性价比,实惠的原装配件。融入米家生态链通过APP易控制且能直观的看到清扫线路
缺点:路径规划还需要进一步加强,在这一点离neato还有一段不小的距离,激光传感器精确度不高,寻路时过于暴力。
一句话总结:
如果对家里的卫生清洁程度要求比较高,而且家里地上垃圾种类比较多,那么你可能需要NEATO D8000。他能满足你对于家庭洁净的最高要求。
而小米扫地机器人,能以不到一半的价格做到80%甚至90%效率,除了抢不到以外实在难以挑剔。
至于推荐,肯定是小米扫地机器人啦!
如果对您有用请记得留言,点赞,打赏,baby我不胜感激!!
谢谢大家观看!!
再会!!
















luzituzi
校验提示文案
张大妈家的小帅
校验提示文案
飞龙在天猫
校验提示文案
yunzone
2.D8000小毛病特别多,拉圾盒用了一段时间后特别容易自己弹起。弹起后基本就停摆了。
3.D8000红外探头寿命短。具体的请看好爸爸网站的评测。
小米没出来前,好爸爸网推荐的是Neato,小米出来后,基本上都推小米了。小米扫地机器人是小米少有的良心
之作。
至于小米的算法,还有回充的路径,个人认为比Neato要好一些。小米是分块清扫。每块的面积不到10个平方。虽然滚刷比Neato短,但清扫时间要短得多,说明算法要好。不要讲Neato重复是为了扫得干净,重复扫是因为算法不行。
校验提示文案
tonyhard
校验提示文案
LukeSkywalker
校验提示文案
吹雪满楼1
校验提示文案
姗姗来玩
校验提示文案
abaddondidi
校验提示文案
ppomo
校验提示文案
画图民工
校验提示文案
-林北-
校验提示文案
一蓑烟雨任平生_
校验提示文案
雪翻飞
校验提示文案
nathan苏苏
校验提示文案
阿皮皮
校验提示文案
金刚八号
校验提示文案
hroc
校验提示文案
zijing911
校验提示文案
howuseit
校验提示文案
太湖小虾米
校验提示文案
dcl2501
校验提示文案
值友2394355710
校验提示文案
河马大大
校验提示文案
杜嘟嘟
校验提示文案
Suutony
校验提示文案
值友7737540274
校验提示文案
后GG冷静
校验提示文案
easysee
校验提示文案
abaddondidi
校验提示文案
东瓜在路上
校验提示文案
瓦王的肉灵芝
校验提示文案
匿名XX
校验提示文案
xc588
校验提示文案
zjchinar
校验提示文案
雾霾菌
校验提示文案
大白酱
校验提示文案
eugenehom
校验提示文案
雷杰克
校验提示文案
韧心
校验提示文案