
































11
33
威马汽车携手百度Apollo打造无人驾驶AVP自主泊车技术搭载此项技术的量产车将于明年上市
2020-09-15 17:59:41
3点赞
2收藏
0评论
今日(9月15日),威马汽车在“2020百度世界大会“上,发布了其与百度共同开发的AVP自主泊车技术。
AVP自主泊车技术由威马汽车与其百度Apollo共同研发,致力于通过L4级无人驾驶技术和实时大数据,实现停车场景下的高度智能化、无人化,打造“最后一公里问题“的解决方案。
在此,小小值顺便来普及一下自动化驾驶的分级:
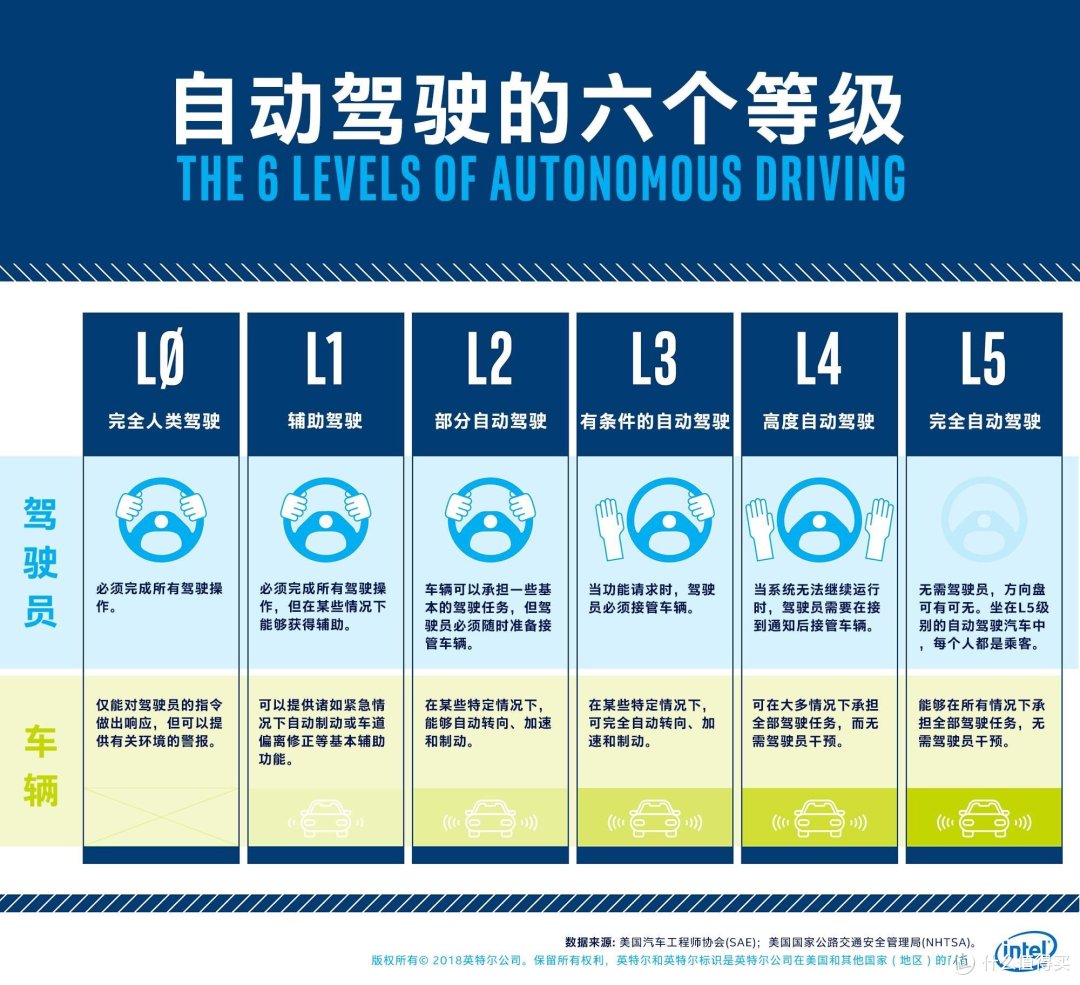
L0(有人驾驶):该级别完全由人进行驾驶。
L1(驾驶者辅助):该级别汽车控制了一些车辆功能,如动态稳定控制系统。大多数现代车都在这个级别中。
L2(部分自动化):该级别涉及到至少两个主要功能的自动化。例如,一些高端车辆提供的主动巡航控制和车道保持共同工作,这些我们可以将其分为2级。
L3(条件自动化):该级别车辆可以在某些条件下进行自动驾驶,但如果有需要的话,驾驶员可以接管汽车控制。3级的自动驾驶汽车还是需要有驾驶员的。
L4(高度自动化):该级别车辆可以始终处于自己完全控制的状态,即使没有驾驶员也能操作。不过是在限定区域或限定环境下(如固定园区、封闭、半封闭高速公路等环境)。L4和L3最主要的区别在于是否仍然需要人类干预,L4的无人车能够在紧急情况下自行解决问题,而L3的无人车在此情况下则需要人类驾驶员的介入。
L5(完全自动化):该级别是真正意义上的可以在每个驾驶场景中(不局限与特定场景)完全自主驾驶系统。
AVP自主泊车技术是如何实现的?
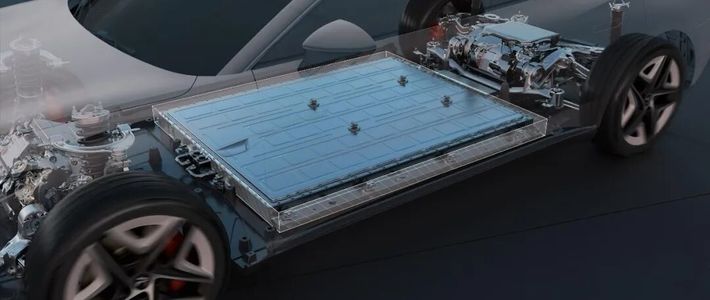
这套AVP自主泊车技术得以实现,依赖于全车的5个摄像头+12个超声波雷达方案。同时,百度Apollo的算法起到了关键作用,可对外输出超240项AI的能力。

此外,AVP自主泊车技术可以通过简单地学习或者直接借助高精地图,完成在无人干预情况下的自动驾驶、躲避障碍物、车位智能搜索并自主泊入泊出。
这项技术是自动驾驶技术、高精地图、人机交互、传感器硬件同步进化的成果,真正做到了特定环境的无人化驾驶。
这套自主泊车技术究竟有什么用?
随着全球汽车保有量的持续攀升,“停车难”已经成为用户在驾车出行时仅次于“堵车”的困扰。就目前而言,尤其是一二线城市的热闹商圈,当用户驾车到达停车场后,通常需要花费大量时间来寻找车位,而且对于部分新手司机在面对停车难度较大的停车位时,还需花费一定的时间进行泊车。

此外,在取车时,有不少人都有过忘记车辆位置的尴尬经历,又或者虽然记得车位编号,却苦于停车场过于庞大和复杂,找车可能需要花费10分钟甚至更久。
而这套AVP自主泊车技术正是为了应对这两大难题,解决用户的停车痛点,完成用户在停车场景下的时间自由、空间自由。
最后,值得一提的是,今天所说的AVP自主泊车技术将被用在威马的第三款新车——EVOLVO上,以实现量产。新车预计明年上半年上市,就让我们拭目以待吧!