




































































312
127
为什么扫地机器人总卡困?原因是技术落后,第四代导航技术都来了
2020-11-10 23:20:34
0点赞
0收藏
0评论
现在市面上大部分扫地机器人,已经可以满足家庭清洁所需,吸力与噪音控制都很完善,但仍然存在着一个很普遍的局限性,那就是识别能效过低,容易出现缠绕卡困的情况,针对凳脚、线材、塑料袋等物品无法有效进行识别,最终还是要人去抬起机器,十分繁琐。

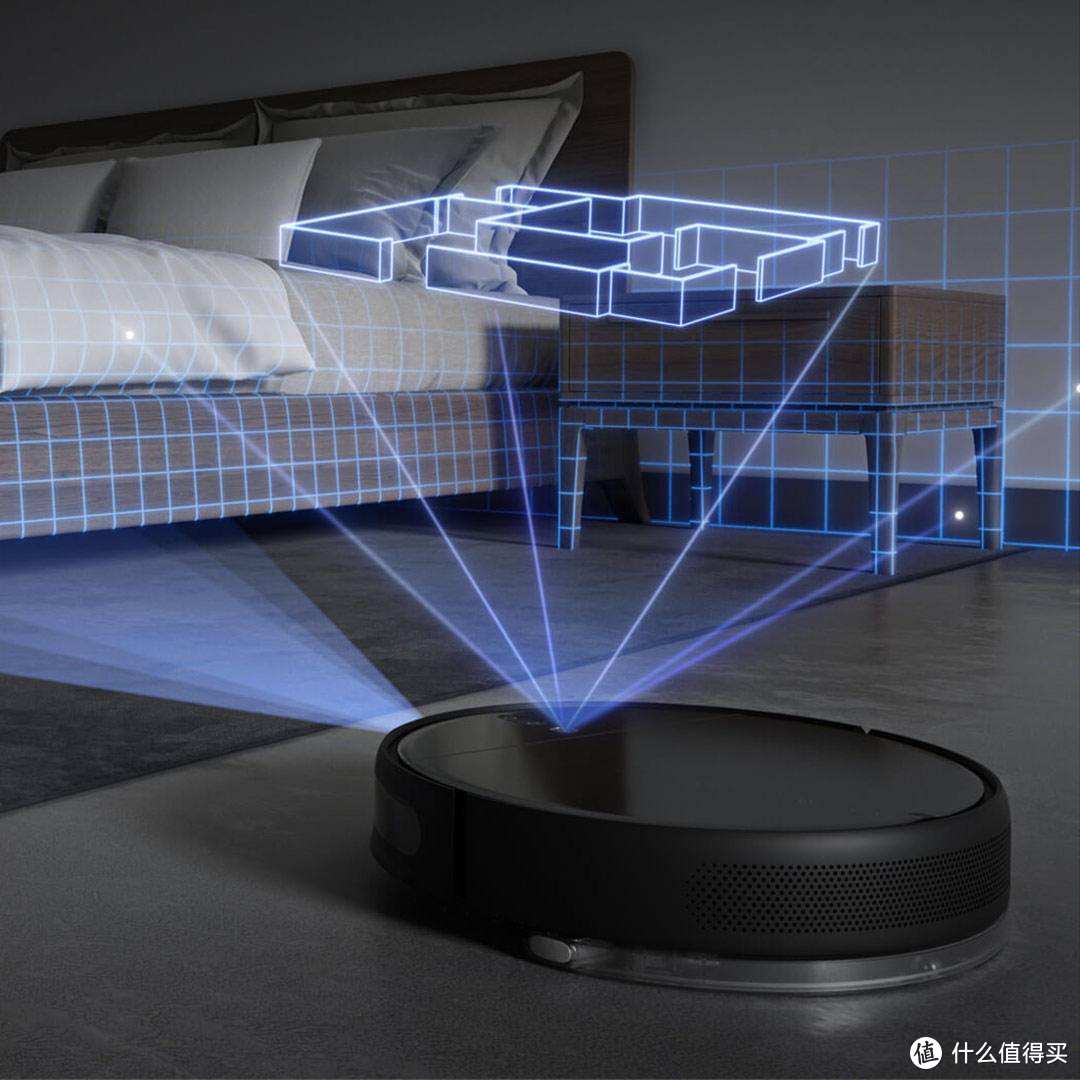
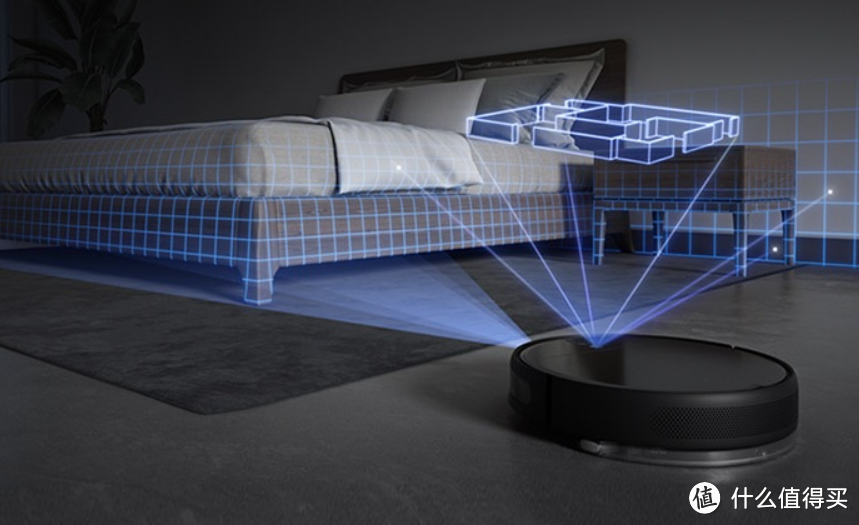
存在这样的问题并不难理解。因为,市面上现存的扫地机器人,大多数采用LDS+ToF技术,其中LDS是扮演着十分重要的角色的,它通过激光发射,触及到障碍物反射回来的时间,来判断自身与障碍物的距离,在针对落地窗、凳脚、塑料袋等反射度高的物品时,无法有效识别避让。

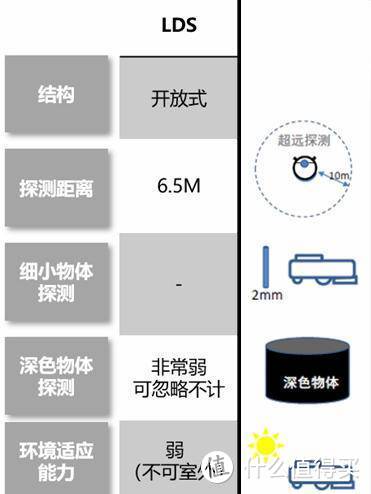
其实我们通过数据来看就能知道LDS的弊端。目前的LDS探测距离仅为6.5米,无法对细小物体进行探测,同时对深色物体的探测十分弱,简直可以忽略不计,而环境适应能力也不可用于户外光线强的地方,LDS的弊端十分明显,但是由于过去的技术局限,已经属于相对先进的解决方案了。
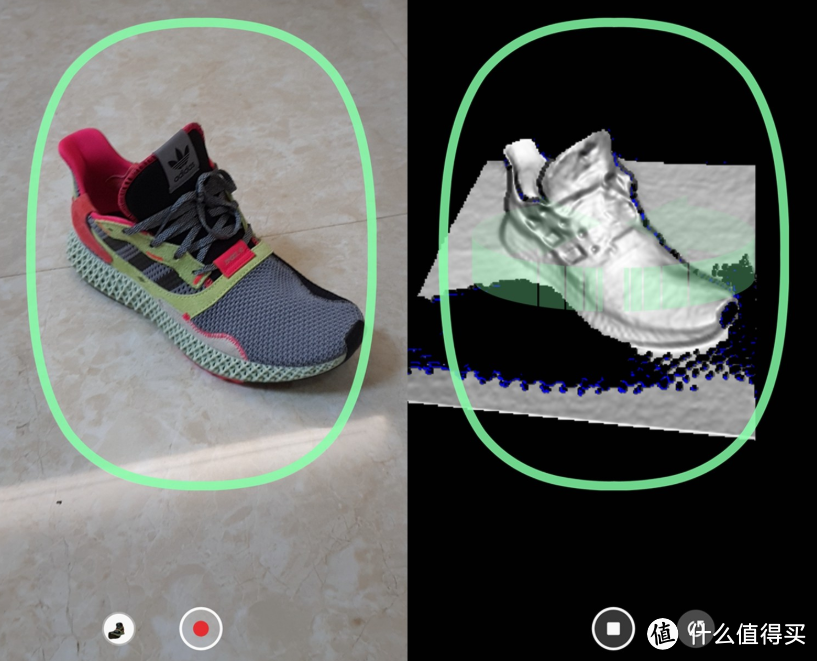
目前,第四代VSLAM定位导航技术不仅可应用于弱光、弱纹理、强光等光线复杂室内场景,更可智能识别室内百种图像物体、分类记录、视觉测距和避障,规划最佳清扫路径。VSLAM的扫描范围4倍于LDS,并且建图精度提升超过5倍,可探测出深色物体,同时还拥有极强的环境适应能力,户外也可以使用。这套方案,在识别后避障,缠绕率预计降低约为60%。
VSLAM定位导航技术,对于扫地机器人带来的好处十分明显,它可以实现建图更快扫描精度精确至毫米级,细小物体清晰标注深色物体/墙面探测精准,不碰不撞强光干扰小,不惧暗光环境,适应能力更强,相较于LDS方案,有着跨越式提升。
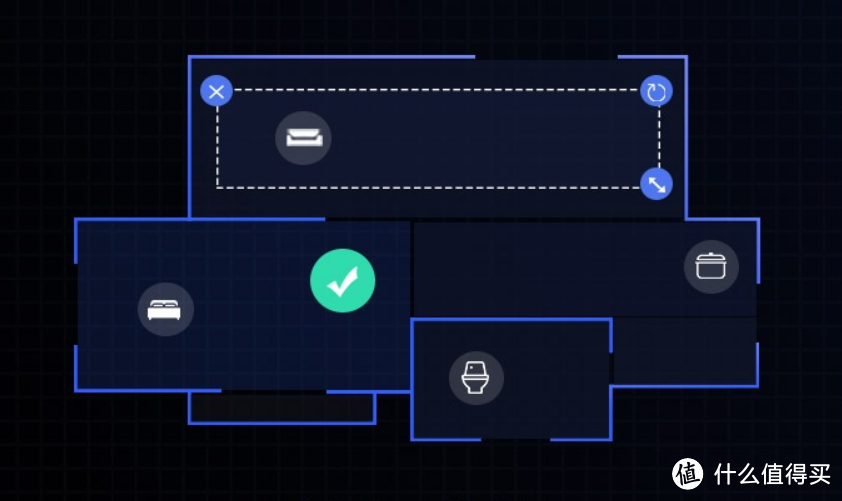
了解完VSLAM定位导航技术的技术背景之后,我们再来说说ToF技术相关的发展过程。ToF技术,首次被广泛应用的时间是2019年,其中大疆Spark无人机将ToF摄像头作为避障与手势信息;而谷歌的AR、微软的MR设备里使用ToF技术来完成3D建模,将这项技术用在扫地机器人身上,可以实现更精准的建图,并且将分房间清扫,分楼层记忆功能也都一一攻破。
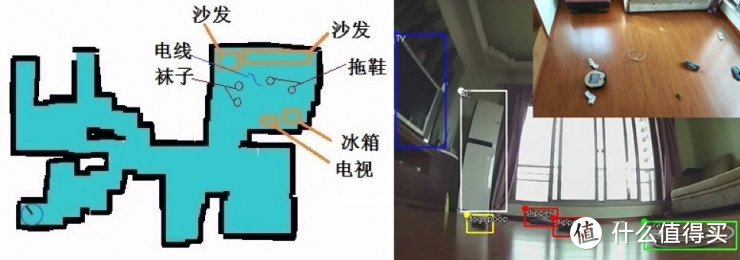
诸如电线、抹布/袜子、拖鞋/鞋子这些生活用品,在LDS+ToF技术方案中,极其容易使得机器人被卡困。而VSLAM+ToF技术的扫地机器人,则可以边清洁,边规划下一步动作,为扫地机器人构建出高精度的室内的导航系统。
由追觅科技强大的算法团队研发的VSLAM+ToF技术,所带来的功能优化也非常全面。诸如自动分区/重点清扫、软件虚拟墙、AI建议:收拾障碍物等日常功能,也都可以通过这套方案来完善扫地机器人的智慧化效果。

目前,这套方案在扫地机机器人领域实属罕见。与其说罕见,倒不如说成本太高,应用这项技术的某型号产品售价高达4-5k之间。不过小米似乎要当一回破局者,搭载VSLAM+ToF技术的米家扫拖机器人1T,做到了2000左右之间的定价,又一次上演了“价格屠夫”的本性。
这次科普不为别的,只为大家在选购扫地机器人时,不要被各种高大上的介绍所迷惑,尽量了解技术背后的实际应用效果,尽量认准第四代VSLAM扫地机器人。















