


























































158
30
百度纯视觉和华为激光雷达方案,谁才是未来的主流智驾?
2024-09-30 11:46:17
13点赞
25收藏
121评论
我们人类为什么没有激光雷达,只有纯视觉的眼睛?其实从第一性原理来看待这个问题,我们人类要活着,自然选择也好,人类实践也罢,都在说明一个道理,在这个世界上安全的存活,纯视觉就足够了!
未来的主流智驾我认为只有纯视觉,即便是激光雷达方案,激光雷达也是纯视觉的一个拐棍(辅助),真正在起主导作用的只是那几个摄像头。
纯视觉能够打败激光雷达,还真是被特斯拉折腾出来的结果。
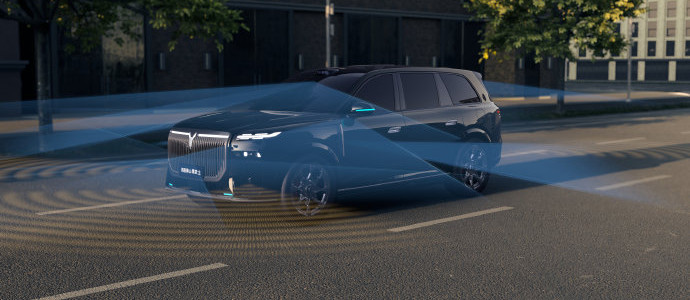
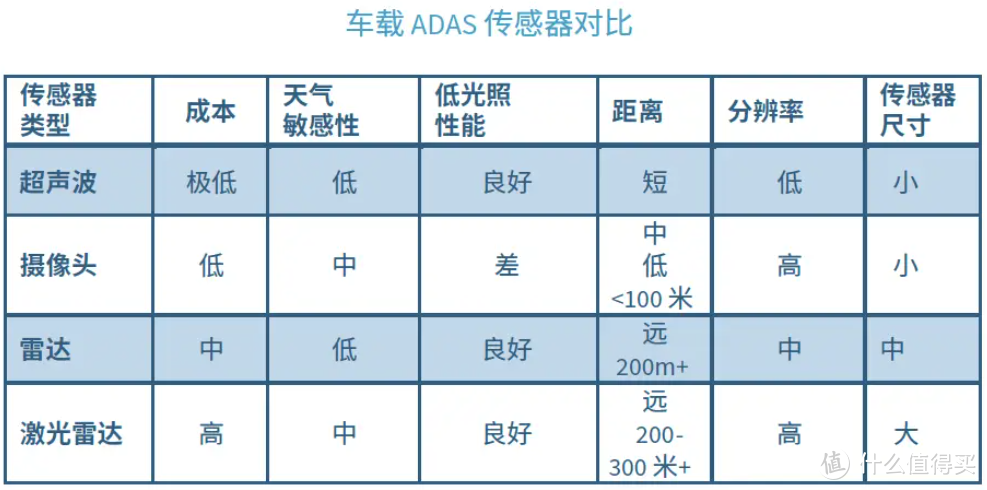
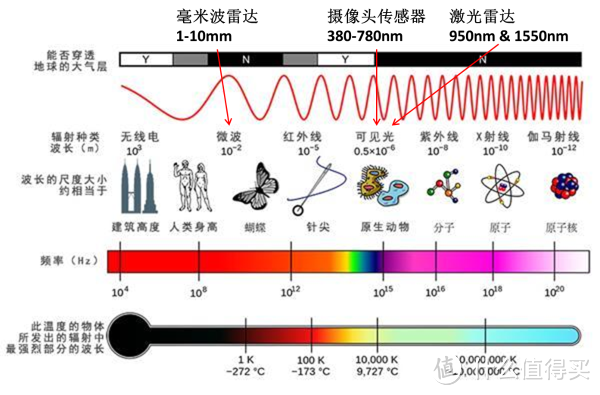
摄像头vs激光雷达,最本质的区别就是2D信息和3D信息,激光雷达天然的可以生成三维信息,而我们生活的环境就是三维的,这点上对于后期的处理很方便。而摄像头我们可以理解成一张张的图片,也就是2D的,早期的自动驾驶,无法通过这一张张的图片获取到深度信息,也就是无法满足在三维空间的行驶,必须有其他传感器(雷达)辅助才行。
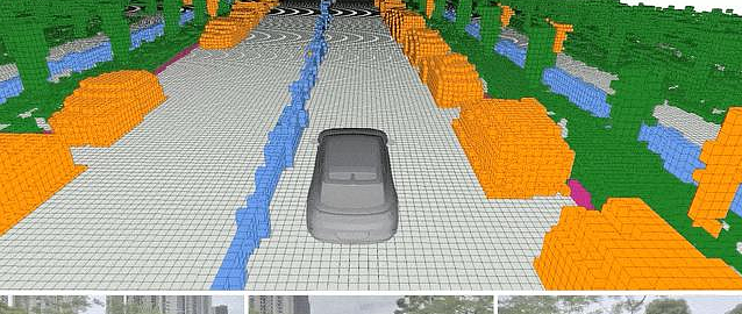
但是后来特斯拉引入的OCC占用网络模型,最大的特点就是可以将一张张时间序列的图片叠加在一起,形成具有深度信息的3D像素空间,类同于“我的世界”游戏呈现的状态。

好吧,至此,激光雷达最大的优势被OCC占用网络这项技术给抹平了,而其价格昂贵的劣势又凸显出来。此消彼长,纯视觉方案更优秀。
其实,懂行的人还会提出另外一个优势,就是激光雷达在低光照(夜间)或者光线变化大的情况下表现得更好。好吧,这个的确需要承认。我们仔细分析一下这个场景,低光照。汽车自带灯光系统,可以弥补低光照问题。如果是扩大来看得话,更多的“长尾问题”等待解决,这些都不是传感器层面能解决的。
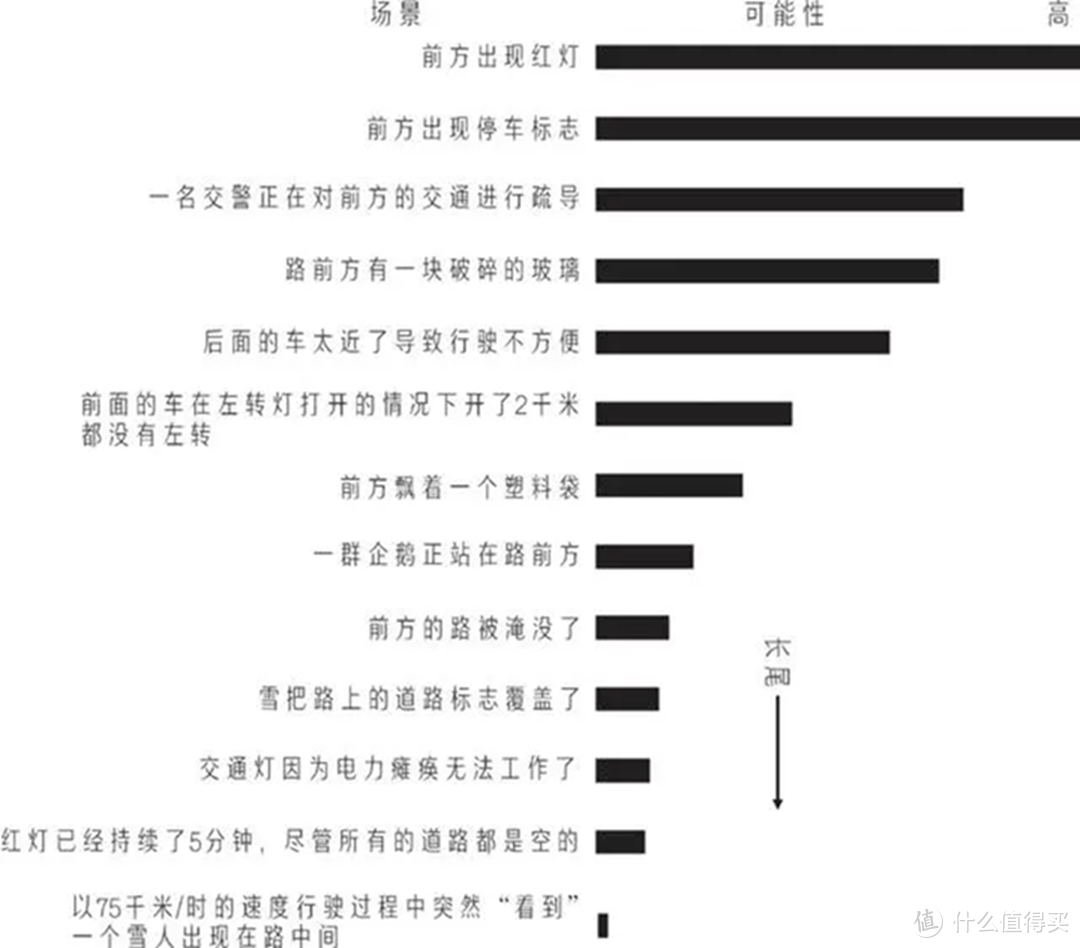
长尾问题只能靠:端到端大模型。现如今的自动驾驶大模型都是分开的,检测大模型,预测大模型,决策大模型,模型之间都是基于规则构建的。这种人工定义的规则,无法做到穷举,就无法彻底解决长尾问题。
而端到端大模型,只有传感器数据输入,直接决策输出,无人工参与的训练,才能彻底解决长尾问题。当然,即便是激光雷达方案,也面临同样长尾问题,这并不是两个方案的本质区别,这里只是提及一下,不做过多讨论。
结论就是:激光雷达虽然可以天然的形成3D空间状态,但是通过视觉摄像头,引入OCC占用网络后,也可以呈现同样的能力。激光雷达的价格更贵,并不会成为未来的主流。即便激光雷达可以有优秀于视觉传感器的地方,也只是修修补补,并无本质区别,那些长尾问题还是需要依赖端到端大模型来彻底解决。
当然,这并不意味着激光雷达方案就此消失,未来会形成两套机制。更多的传感器,会在不同波长的情况下去感知这个世界,原理上更安全一些。那些高端豪华车依旧会坚持激光雷达路线,做到装备差,价格差!服务高端客户。但是更多的普通民众,会选择成本更优秀的,效果差不多(几乎一致)的视觉方案!

















九歌个
说真的,我一个普通人多的不懂,但是怎么感觉都是激光雷达更靠谱。而且有听说特斯拉自己也有用激光雷达的车型。
校验提示文案
ntm0521
校验提示文案
浪了个浪
校验提示文案
Stormkoo
校验提示文案
警察问起就说没见过我
校验提示文案
上海买卖
校验提示文案
彪悍的野猪
退一步说,就算只从智驾一个角度分析也是毫无逻辑,人开车除了视觉,还有另外五感呢?还有控制接受后年五感的大脑呢,这些马圣都不理了?
校验提示文案
值友3195642705
校验提示文案
影子_cs
妥协视觉方案就是因为利润问题。
校验提示文案
天涯海阁
校验提示文案
值友6909150175
校验提示文案
值友3997109749
校验提示文案
丁丁dfh
校验提示文案
NTMD
校验提示文案
哈哈哈哈hhhh1
校验提示文案
jccg315
校验提示文案
gogodaddy
校验提示文案
秋色cmcc
校验提示文案
金鍂鑫
校验提示文案
值友7870657032
校验提示文案
forsxj
校验提示文案
上海买卖
校验提示文案
值友7541440143
校验提示文案
对三ii要不起
校验提示文案
值友6518606525
校验提示文案
值友4147144819
校验提示文案
警察问起就说没见过我
校验提示文案
阳光下De猫
校验提示文案
风景这边独独好
校验提示文案
钱要花得值
校验提示文案
ooor
校验提示文案
值友3195642705
校验提示文案
炒饭超人
校验提示文案
Stormkoo
校验提示文案
值友7328337420
校验提示文案
wangjin1368
校验提示文案
牧羊人小永
校验提示文案
sfeiyu
校验提示文案
彪悍的野猪
退一步说,就算只从智驾一个角度分析也是毫无逻辑,人开车除了视觉,还有另外五感呢?还有控制接受后年五感的大脑呢,这些马圣都不理了?
校验提示文案
暴躁大老爹
校验提示文案