













































13
39
机器视觉可堪大任?科沃斯DEEBOT X1 OMNI 扫拖机器人 首发开箱
2021-09-25 18:00:00
33点赞
6收藏
57评论
大家好,我是Circaboy,感谢张大妈和科沃斯,在我刚好装修结束的时候让我有机会体验到科沃斯今年的新款旗舰级扫地机器人:X1 OMNI。价格也是旗舰级的:4999,这绝对是我有史以来用过的最贵的扫地机器人,而在一段时间的体验之后,我也能说,它绝对是我体验最好的扫地机器人。

DEEBOT X1 OMNI的优点太长不看版:
自带集尘箱子,可以延长倒垃圾的时间间隔;
支持语音直接控制,不用再开手机;
支持吸尘洗地一体,自动加水,清水污水分离;
支持快速3D建图,可更直观地观察扫地机器人的效果;
在遇到障碍物之前就能避开障碍物,显得更聪明;
1.前言

在我开始使用扫地机器人时,我最开心的就是每天不用自己动手扫地了,但是随之而来的问题却是扫地机器人导航精度跟不上,会出现建图之后识别错方向等情况,扫地机器人的尘盒需要我每天清理,拖地功能需要我手动加水,手动清洗拖布这些繁琐的操作更是让我感觉我好像失去了用扫地机器人的意义。
因而,我偶尔也会想,什么样的扫地机器人会不需要我手动清理集尘箱呢?我可以抛开手机APP直接对扫地机器人进行操控吗?扫拖地功能什么时候能全自动化,也就是不需要我干预它的拖布清理,它自己就能拖完地之后自己洗干净拖布,以及自己加水进去?
2.哪里升级了?
导航升级:
科沃斯这个目前国内扫地机器人市场占有率第一的品牌,在导航技术上就有自己的发展路线,他们家2015年就结合LDS激光雷达与SLAM的SmartNavi技术,并应用在DR95上,这是世界第一台在清扫之前就能建图的扫地机器人。
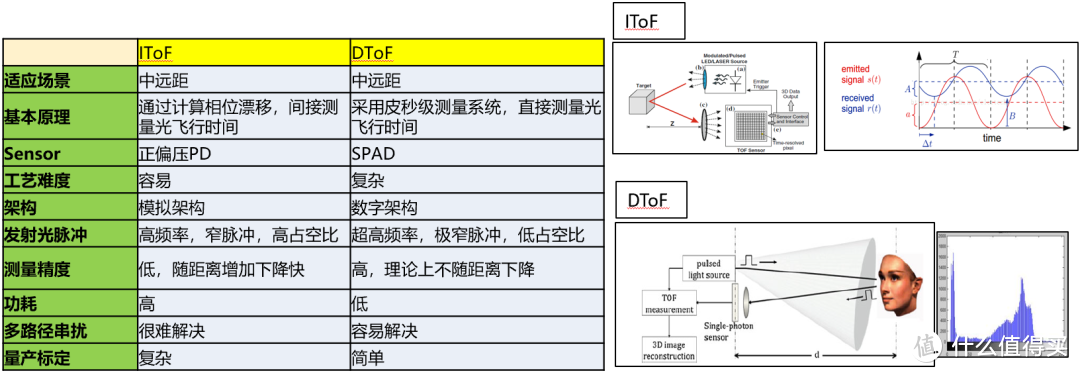
2020年科沃斯出了一个新技术:dToF测距。dToF,direct time of flight, 顾名思义就是直接测量飞行时间。tof最初就是希望能直接测量时间来对应距离,dToF在很多关键性能方面对iToF都有绝对优势,但其技术壁垒比较高,所以不是所有的厂家都有实力去做dToF的应用的,目前我知道的就只有苹果和科沃斯两家用了这个技术。dToF导航,比LDS激光导航的精准度更高,扫描范围更广,dToF导航模式的建图效率更高。
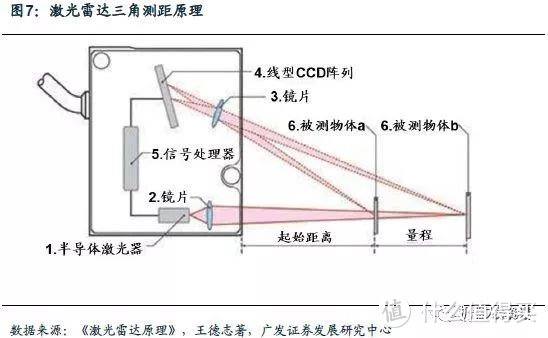
LDS激光导航系统的基本原理是发射光束然后再弹回来,以此测绘出机器人和目标地点的距离来绘制一张地图,了解其原理的人都知道这个地图是非常基础的二维的图像。而且激光雷达要频繁转动进行工作,不但容易坏,而且还无法探测到落地窗、落地镜、花瓶等高反射率物体。
而视觉导航的工作原理更好理解,视觉系统是机器人与人类感知环境最接近的探测方式,受益于模式识别、机器视觉的发展,视觉导航的机器人通过强大的算法能够在大面积区域和开阔空间内实现更为高效的导航。清洁时,扫拖机器人也能在地图上创建可视化地标以进行位置追踪,从而掌握已经清洁的区域和尚未清洁的区域。不过,视觉导航也有缺陷:1)受光线条件限制较大,无法在黑暗环境中工作,2)计算量比较大,实时性较差。
所以,当前LDS激光技术,dToF技术,视觉导航技术的优劣如下(从最好到最差):dToF》视觉》LDS。当然,复合技术更优于单个技术,比如dToF加视觉就比单纯的dToF导航要好很多。基于这些技术,2021年他们家的旗舰款科沃斯T9能做到在碰到障碍物之前就主动避开,因为它应用了dToF2.0和3D环境感知2.0。
此刻我看了看我家那个之前买的,现在正怼着我的脚一撞一撞的便宜货智障扫地机器人,轻轻叹了一口气,咋就那么蠢呢它,还好我换了。

刚刚发布的科沃斯X1 OMNI能做到跟人一样看到障碍物就主动避开,而不是等撞上去之后才愣一下说:哦,原来我撞到障碍物了,我该避开了。这个智能化的效果得益于科沃斯的AIVI 3D技术和X1 OMNI上搭载的高品质RGB摄像头,强大的软硬件将结构光与视觉识别的优势完美联动起来。

说到结构光技术,这个被各大手机厂商在旗舰手机产品上采用的的技术,不仅仅用作于人脸识别,还能被用于包括美颜自拍、AR购物、3D打印等方向。但是往扫地机器人上应用,这应该是科沃斯的首创,因为扫地机器人的工作环境与数据测量要求,刚好契合结构光技术的优势。
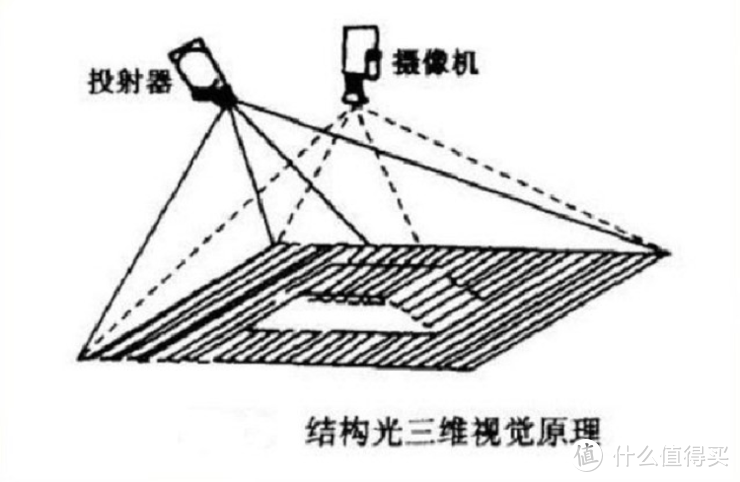
扫地机器人上所使用的3D结构光,虽然技术原理上与iPhone相同,但使用场景却截然不同,扫地机器人上使用的3D结构光技术,依然要保留可获取物体3D信息、精度高、环境适应性强等特性,并且还要能直接测量高精度深度信息,能达到毫米级别;主动发射和接受激光,暗环境下也能正常探测。
相对于智能手机只自拍的场景来说,扫地机器人的使用场景更加复杂,例如它需要在运动中保持稳定高效的工作,同时需要面对更为复杂的家庭环境,它必须精准地测量不同类型、形状及尺寸的物体。这些复杂环境的限制,就需要思考如何将运动中的扫地机器人与近距离深度信息采集的3D结构光优势互补。

科沃斯X1 OMNI就是在3D结构光基础上联合视觉识别,快速识别障碍物,做到不撞物体就能识别障碍。
更有意思的是,科沃斯在结构光与视觉识别基础上做了一个对房间进行快速3D建模的功能,能在清扫之前就扫描屋内结构形成3D模型。当然,这个建模结果只能在手机APP中展示。以及,扫地机建模结束之后肯定会跟我们的真实家居布置有一定的偏差,所以它也支持我们手动添加家具摆放位置,以及自定义不同房间的地板材质等。
自定义地板材质,就能辅助扫地机器人在清扫时自动识别是木板还是瓷砖,以便于动态调整吸力实现最佳清理效果。
颜值升级:

配置上了旗舰级配置,价格也上了旗舰级价格,那么工业设计自然也应该要旗舰级的工业设计。科沃斯X1 OMNI的整体设计由JACOB JENSEN DESIGN操刀,整体以黑+银呈现,撞色设计更具艺术感,无论是现代风格的家居装修风格还是古典中式风格,都能不显张扬地融入进去。

科沃斯X1 OMNI的银色上盖并非一体化设计,反倒是很大胆地采用了磁吸固定设计,整个上盖有5个磁吸固定位点,能保证我们拆下来时不额外动用工具,吸附上去使用时不会被轻易掀落。
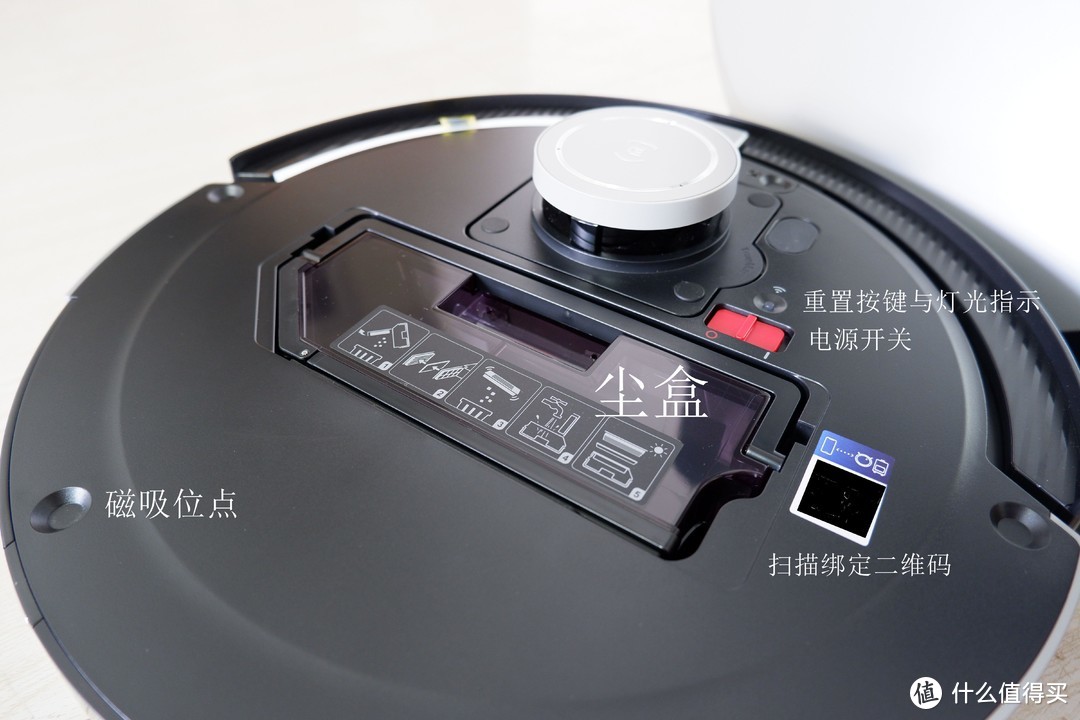
拆开上盖之后,内部工业设计也依然并未放飞自我,反倒是处处显精致。环绕机身一周的内嵌磁吸位点,中间一个小尘盒,尘盒旁边是绑定机器的二维码,红色部分是电源开关,电源开关上面则是重置按键与灯光指示二合一的灯,也就是说它可以指示机器WiFi连接情况,也可以按下去让机器进入WiFi配对模式。


要注意的是,整个扫地机器人的电源开关就只依靠这个红色的物理开关,而处于机器摄像头旁边的那个看上去是电源开关,实际上是电源指示灯的部分,只起到指示扫地机器人运行状态的作用,并没有开关电源的作用。

机器内部的尘盒上也设计了一个专用把手,扣起来之后可以很轻松地将尘盒拿出。这个设计好评,比我之前卡扣式的尘盒好用很多。

尘盒的设计也很精巧,因为它的过滤器与进风口之间隔了一个海绵,这可以避免更细小的灰尘进入过滤器,让过滤器的寿命增加一倍,我想到我之前用的扫地机器人,过滤器一段时间不清理它就被堵塞了,造成吸力下降,清洁效果变差的后果。
除了最大的进气口,科沃斯X1 OMNI也在尘盒旁边设计了一个可开合的小门,与之对应的是尘盒储物格旁边有一个小出风口,便于集尘基站自动搜集尘盒里的灰尘,让我不必每天都需要清理尘盒。
基站升级:

现在自动集尘的机型很多,像科沃斯T8 aivi+/T9 aivi+,可以选配自动集尘座。而自动洗拖布的也很多,比如云鲸、科沃斯N9+、追觅W10、石头G10等,但是同时拥有自动集尘底座和自动洗拖布基站的扫地机器人,目前只有科沃斯X1 OMNI。

科沃斯X1 OMNI的基站尺寸为430x448x578 mm,也就是说它的高度是57.8cm,上图中可以看到它跟我的桌子几乎是等高的了,相对于普通的基站来说,它足足大了一圈,这是因为里面集成了自动集尘箱与两个水箱。

科沃斯X1 OMNI基站的集尘箱在靠近扫地机器人的部分,属于嵌入式设计,内部已经内置了一个集尘袋。相对于扫地机那个迷你版的尘盒来说,集尘箱的容量更大,可以让我们更懒一点。
举个例子,我之前用没有集尘箱的扫地机的时候,大概是两天清理一次尘盒,而如果我忘了清理尘盒,那么扫地机第三天的时候就会在清扫过程中留下一部分灰尘,这是因为灰尘太多,堵住了过滤器。
而如果有了集尘箱,那我就可以一个星期倒一次垃圾袋,还不用把扫地机的尘盒拿出来。要知道扫地机的尘盒用一段时间之后灰尘会特别多,拿出来的时候肯定是沾了一手灰。


科沃斯X1 OMNI开启集尘箱的操作很简单,按下基站底部的弹出按钮,集尘箱就会自动弹出,倒完垃圾之后推进去卡住就行了。

科沃斯X1 OMNI的基站内部除集尘箱之外,剩下的空间就都留给分离设计的4L清/污水箱,而这个空间支持拖布自动回洗+自动补水+热辅烘干。里面内置的银离子模块,一方面能保证拖地的时候对地面除菌,另一方面是给污水桶除臭,防止长时间脏水产生味道。

分开的清水和污水箱可以让科沃斯X1 OMNI实现自动加水,自动清洗拖布,清水污水分离储存。
自动加水与清洗拖布烘干的流程,让拖地这件事彻底自动化,不再需要我的人工干预,而我需要做的也仅仅只是加水,倒水。4L的水箱,满足一个120平米的房子拖地应该是没有问题的。

科沃斯X1 OMNI的拖布是可拆设计,并且机身上左右各一个拖布,基本是机器人走到哪儿,就能拖地拖到哪儿,机身所过之处,干净无比。

哦对了,科沃斯X1 OMNI还在螺蛳壳里做道场,硬在俩水箱之间塞进去了一个清洁工具收纳箱,可以收纳两个拖布,一个刷子,一瓶清洁剂。这很有意思,因为这些零碎小物品的收纳与管理确实是很多人都会头疼的问题,科沃斯X1 OMNI能想到这一点确实是用心了。
吸力升级:

5000Pa吸力+双边刷+浮动滚刷,科沃斯X1 OMNI是目前科沃斯产品中吸力最大的一款扫地机器人,也是目前众多扫地机器人机型中吸力最大的之一(米家扫拖pro、追觅W10都是4000pa)。

有意思的是,拖布的安装是磁吸式安装,而边刷的安装是卡扣式安装,这是因为拖地功能我们需要快速拆装拖布,而边刷这个一旦装上去,就几乎不会被拆下来。
两个边刷用红黄两颜色进行区分左右,避免安装出错。

科沃斯X1 OMNI的滚轮拆装与我之前用过的一样,都是卡扣设计,拆装都很方便。
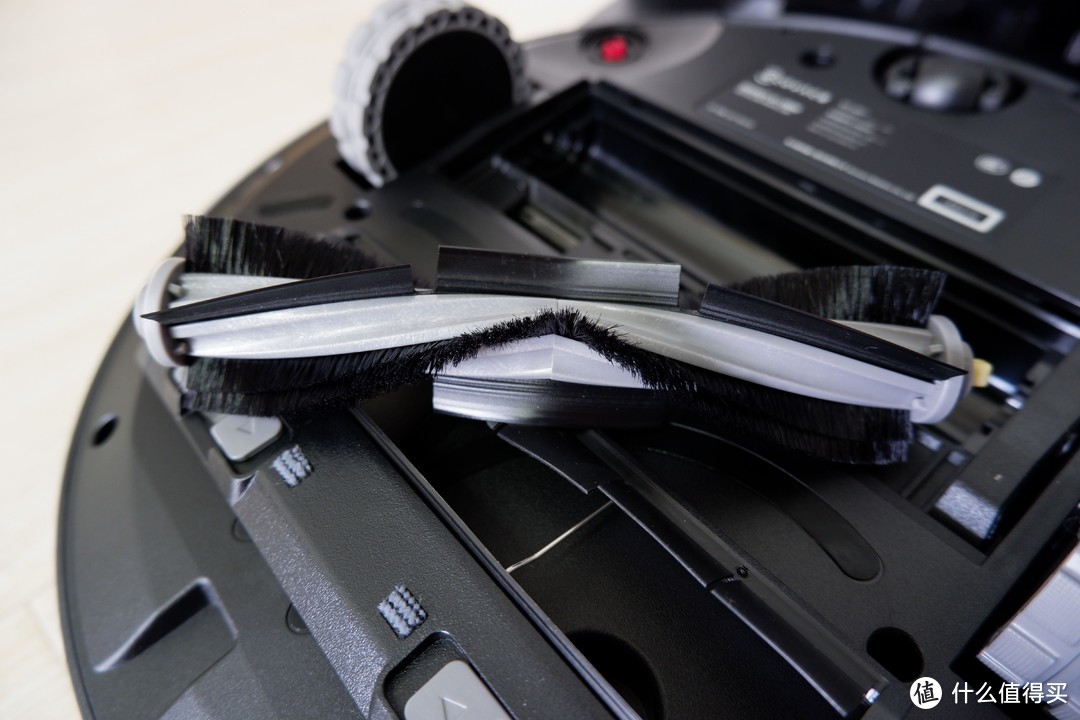
科沃斯X1 OMNI的滚轮没有什么特别的地方,因为现在的滚轮设计思路已经足够完善了。
交互升级:

科沃斯X1 OMNI支持AI智能语音交互方式,可以使用唤醒词“OK, YIKO”唤醒地宝,这项功能可以说完全解放双手,家里的老人、小孩都可以使用,无需操控APP,就可以调节吸力、选择指定的清扫区域。
支持2D+3D地图,2D地图下快速建图速度提升10倍,3D地图可以真实还原家居环境,前面我说的是基于视觉与结构光技术的3D建图,而在这样的基础上的2D建图更是比传统的LDS激光导航要快上不少。

科沃斯X1 OMNI支持视频功能,可以远程操控指哪去哪、全无巡航、语音通话、召回基站等。感觉像是操作一个视频机器人。
也就是说,一定程度上,它可以替代家里的监控摄像头,对家里的状况进行监控。而有特殊的事情的时候,它也可以成为家里的一个电话,实现有网就能进行视频通话的功能。比如家里来麻匪了,你吃着火锅唱着歌,突然就让麻匪给劫了,这时候一个扫地机器人的出动并不会引起麻匪的警觉,而你远程视频观察到的情况就能成为证据,及时帮助公安做针对性布置。
虽然它的画面质量并不是太高,因为习惯了手机摄像头的高清画质,我们再回来看这些低清视频流,肯定会觉得很难接受。不过呢,科沃斯X1 OMNI的远程视频质量识别大概的状况肯定是够了,因为画面中连字符都能很清晰地识别出来,这就够了。
这大概就是扫地机器人上视觉技术的优势,在联网状态下,激光技术路线的扫地机器人只能当扫地机用,而采用视觉技术的扫地机器人,还能兼顾监控安防与远程互动,从这个角度来看,视觉技术的扫地机器人更像是一个人了。

当然,科沃斯X1 OMNI的配置肯定远远不止于此,例如最常见的2cm台面翻越,自动识别地毯增大吸力,自动识别地毯不拖地等基础功能我就不再赘述了,现在这些几乎都已经成为当前扫地机器人的标配了。
3.总结
相对于那些普通款的扫拖机器人来说,科沃斯X1多了一个自动集尘,还有视频功能,语音操控,如果说这些对你都没用,那dToF导航不香吗?肯定比LDS激光好。不过话说回来,我之前用的追觅的拖地还不错,只是会碰撞一些小物件,家具没啥大问题,对于避障要求不高的,就用这款了,要是家里的东西比较杂乱,那肯定是旗舰款主动避开障碍物的科沃斯X1更加适合,毕竟科沃斯作为行业天花板,技术的更新迭代肯定是把其余的品牌甩在身后的,而前沿技术的加持,必然带来的是更加优异的使用体验。
不过要注意的是,科沃斯X1我觉得才是扫地机应该具备的功能最全的一款。因为科沃斯X1 的基础款X1 TURBO不包括集尘功能、银离子模块噢,仅升级款X1 OMNI 包含全部功能,如果是想体验完全“解放双手”的话,我觉得这款扫地机是一定要入的,集尘、自清洁合为一体这也将是未来扫地机发展的必然趋势,毕竟科技发展也是为了让生活更简便,这才是最终的目的啊。

本文商品由什么值得买提供,并邀请用户撰写评测报告。更多新奇好物请关注众测活动~

















zqli
校验提示文案
呆萌的呆呆
校验提示文案
呆萌的呆呆
校验提示文案
mark-2015
校验提示文案
比利亚雷亚尔
校验提示文案
joujey
校验提示文案
希德尼亚皇帝陛下
校验提示文案
fredfei2002
校验提示文案
鹩就一个字
校验提示文案
mzisas
校验提示文案
huzz8683500
校验提示文案
把蜡笔小新收了
校验提示文案
supertoby
校验提示文案
呆萌的呆呆
校验提示文案
社长oba
校验提示文案
sunnyalili
校验提示文案
老王加油
校验提示文案
红尘多可笑
校验提示文案
supertoby
校验提示文案
红尘多可笑
校验提示文案
老王加油
校验提示文案
把蜡笔小新收了
校验提示文案
sunnyalili
校验提示文案
huzz8683500
校验提示文案
mzisas
校验提示文案
社长oba
校验提示文案
鹩就一个字
校验提示文案
fredfei2002
校验提示文案
希德尼亚皇帝陛下
校验提示文案
joujey
校验提示文案
比利亚雷亚尔
校验提示文案
mark-2015
校验提示文案
zqli
校验提示文案
呆萌的呆呆
校验提示文案
呆萌的呆呆
校验提示文案
呆萌的呆呆
校验提示文案