















































































8
31
当自动驾驶成为副驾驶:真实路况中的安全感博弈
2025-03-25 08:24:42
56点赞
19收藏
0评论
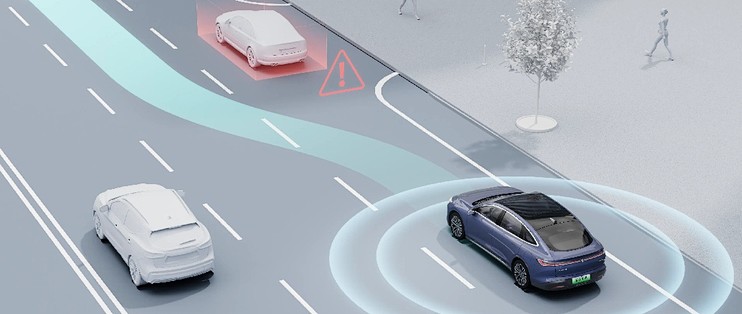
雨夜的高速公路上,特斯拉Model Y突然自动减速至40km/h,中控屏瞬间标红五个潜在风险点——前方300米处路面反光的积水潭被系统判定为障碍物。这种被称为"幽灵刹车"的安全冗余机制,折射出用户与自动驾驶系统信任建立的微妙平衡。
在真实用户体验中,安全性能呈现两极分化。日常通勤场景下,小鹏城市NGP在上海南北高架晚高峰的表现令人惊艳,32分钟行程中完成16次变道超车,仅在遭遇外卖电动车突然横穿时触发一次紧急制动。但北京首钢园区的测试显示,当激光雷达被冰霜覆盖时,蔚来NOP系统对侧方加塞车辆的识别距离缩短60%,方向修正幅度超出多数用户心理预期。
用户日志大数据揭示,人机共驾的安全临界点往往出现在控制权交接瞬间。沃尔沃EX90在系统退出前17秒开始三级预警,通过座椅震动频率和HUD颜色渐变引导接管;而某新势力品牌0.3秒的急促警报声,导致23%的用户产生应激性误操作。更值得关注的是夜间乡道场景,华为ADS 2.0凭借融合感知系统,在无路灯环境下对横穿动物的识别距离比人类驾驶员远40米,但系统保守的40km/h限速策略引发用户争议。

这些真实路况中的安全博弈,正在重塑自动驾驶的价值坐标系。当系统在暴雨中坚持靠边停车时展现的"机器理性",与人类驾驶员冒险前行的"经验判断"形成戏剧性冲突。或许真正的安全革命,始于技术逻辑与人性感知的握手言和。