































































155
30
硬件老兵拆机分析:三目激光矩阵+dToF结构光如何实现扫地机精确清扫和避障?
2021-07-14 13:37:38
273点赞
295收藏
65评论
创作立场声明:创作立场声明:本文为个人针对产品拆解后产出,欢迎理性讨论~
一、前言
各位好,我是abrams2415。什么值得买家电研究所栏目的驻场达人,专注于家电研究。擅长用各种测试设备对家电进行深度评测。辅以通俗的语言告诉大家该产品的真实性能。
今天来谈谈家用懒人神器“扫地机”。我从2011年开始使用扫地机,到目前为止用了超过15台。经过10年的发展。首先简单回顾一下我家的扫地机发展史。
二、10年扫地机发展史
2.1 初代扫地机—随机算法

▲我的第一台扫地机就是这种当年算非常“高端”的随机算法扫地机器人,扫到哪里全凭运气。根本无法做到全屋覆盖、而且避障能力非常差,特别容易被困住。
2.2 vSLAM视觉导航扫地机
随机算法机器人之后,美国那边在2012年出现了以vSLAM视觉导航技术的扫地机。它是一种利用视觉系统实现自主定位与地图构建的系统。其优势是摄像头硬件成本低。但除此之外,缺点也非常多。比如对环境光要求较高,过亮过暗都无法工作、无法和激光导航一样实时察觉新增障碍物,只能靠碰撞感知其存在。定位精度也不够理想。

▲比如iRobot Roomba i7就用了视觉导航技术(扫地机正面有个45°前置摄像头),它的地图无法一次性生成,需运行绘制地图程序多次才能够得到一张房屋地图。数字地图看似平整,实际上缺少很多信息。比如餐桌腿、茶几。而且对于新增的障碍物不能做到在数字地图中实时显示。
▲iRobot的2D红外避障也比较弱。它检测不到电源线,径直碾压了过去。非常容易造成缠绕。
2.3 LDS激光导航机器人
同年2012年,美国另一个品牌Neato是第一个把LDS激光导航技术应用于扫地机的,可以说是目前最稳定、最主流的定位导航方法。但由于结构和工作原理的限制,激光雷达导航有几个缺点:
1、激光雷达头裸露,防水防尘能力差;
2、遇到深色物体,光线反射差,定位容易出现错误;
3、旋转机构通过皮带传动,长期使用可能出现皮带断裂的情况;
4、清扫时容易进灰和头发,长期会造成驱动皮带缠绕头发。造成故障。

▲比如2013年我美亚海淘了3台Neato XV-21。结果都坏了,一台LDS激光模块损坏、一台行走电机损坏。最后拆解3台把完好的零件拼了一台能用的。

▲我利用夜视仪观察LDS激光原理,它实际上通过匀速360°旋转向四周发射点状激光。通过光线接受器接收反弹信号,从而绘制出周边数字地图。

▲但激光导航无法分辨前方的细小障碍物。一些品牌扫地机利用红外线、超声波进行避障,但效果甚微几乎都测不到电源线,最后滚轮卡住报错。
2.4 dToF导航扫地机
dToF英文名为Direct-Time of flight,中文直译为直接飞行时间。工作原理是应用设备会首先发射光脉冲,当光脉冲遇见障碍物时会发生反射,已知光的传播速度是一定的,当距离不同时,接收反射光线的时间也不同,通过记录光脉冲的反射时间,就可以计算出光脉冲发射位置到物体位置的距离,不断的重复这一过程,就能绘制出物体的3D形态。

▲比如科沃斯N8 Pro,就采用了dToF导航技术。特点是全封闭式传感器设计、避免异物和灰尘进入造成损坏。

▲通过照相机能清晰看到科沃斯采用正前方投射出的两条交叉点阵激光,配合正中间的摄像机来检测前方障碍物(点阵激光肉眼无法分辨)
不过,无论是LDS还是dToF导航,这些扫地机有个共同缺点:那就是顶部旋转保护盖会带来扫地机整体高度上的增加。

▲旋转保护盖向上凸出1.5cm、因此我家床底无法进入。这是永远的痛!
2.5 目前最新技术:无凸起三目激光矩阵+dToF导航扫地机

今年360新出的X100 Max,结合了LDS扫描和dToF避障技术。

▲360 X100 MAX最大特点是取消了顶部凸出保护盖,机身厚度显著降低。厚度只有8.5cm!少了1.5cm终于能钻床底清扫了!


▲顶部取消了旋转机构,360 X100的激光旋转装置设置在了正面机身内部。

▲通过红外线摄像头观察,360 X100 MAX采用前方固定线激光+侧向固定线激光的技术,当物体被前方固定线激光照射到时候就能算出与障碍物的距离,然后用侧向固定激光来精确沿边清扫。

▲实际运转情况,360 X100 MAX的三目激光+dToF避障,能精确发现充电线。在我家猫主子的干扰下精确定位并躲避障碍。
目前这款360 X100 Max用了一段时间,关于功能上过多的阐释我就不写了,网上评测有很多。今天我就来拆解下这款机器。看看它内部构造,尤其是三目激光到底是如何布置的。
三、拆解环节

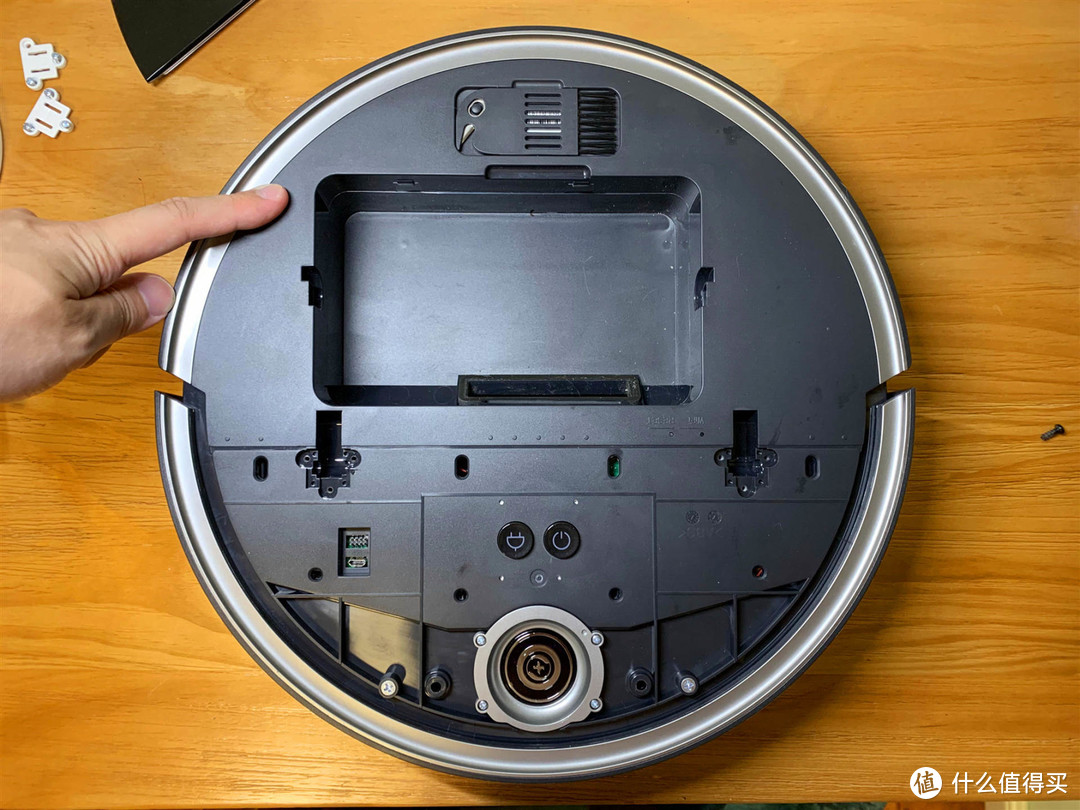
▲360 X100 Max背面功能一览,首先拆除底部护板。
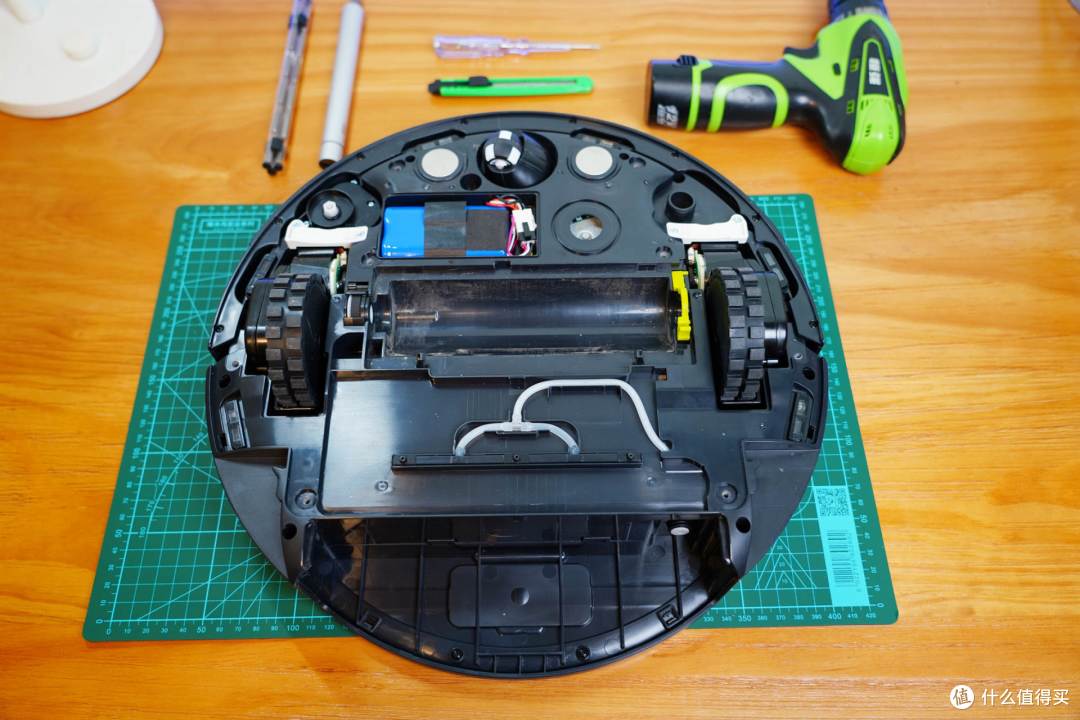
▲拆除底部护板后的样子。
▲拆除上盖前后两块装饰板后发现,上盖无任何走线。方便整机拆取。

▲进一步拆除护板就能露出机器的核心:主控主板。传感器接线从主板左右和前面接入。最大限度利用了机器内部空间.
3.1 锂电池组
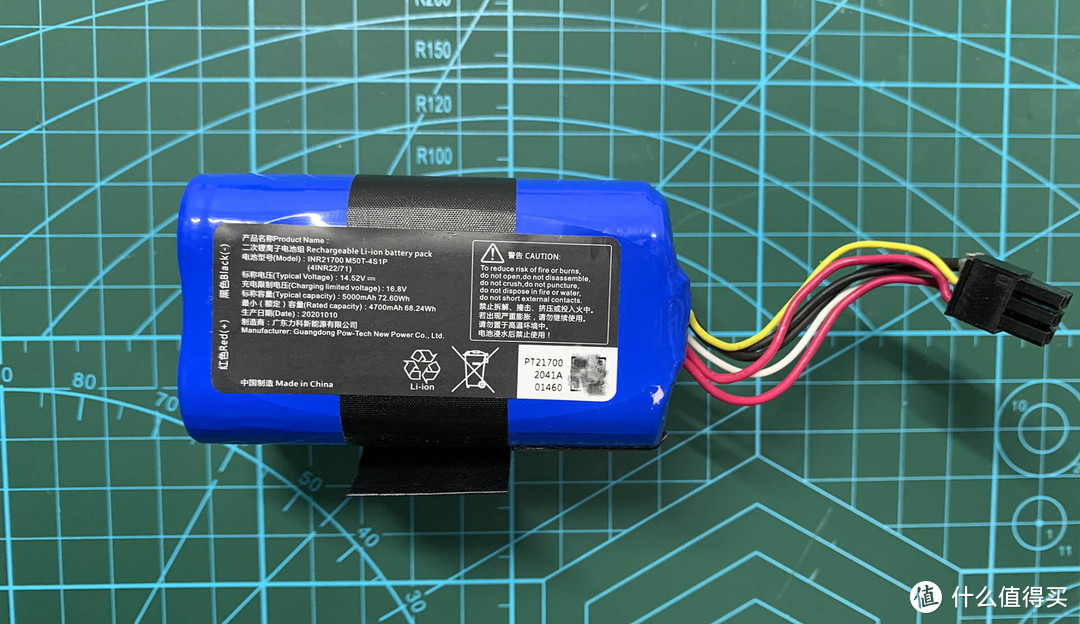
▲锂电池组是拆除背板第一个就能卸下的,方便后期维护替换。电池容量16.8V 5000mAh。大容量电池是实现长续航的关键。
3.2 三目激光矩阵+dToF模块
▲拆除底部背板后接着拆除前面的防撞缓冲装置,主要用来拆下正前方的一个dToF激光避障模块。
激光矩阵模块一:侧向固定线激光

▲位于扫地机机身右侧的这块侧向激光矩阵模块发射线性激光束,再通过旁边的摄像头计算出光脉冲发射位置到物体位置的距离。不断的重复这一过程,绘制出物体的3D形态。完成dToF空间扫描,帮助机器进行精确的沿边清扫。
激光矩阵模块二:正向固定线激光束
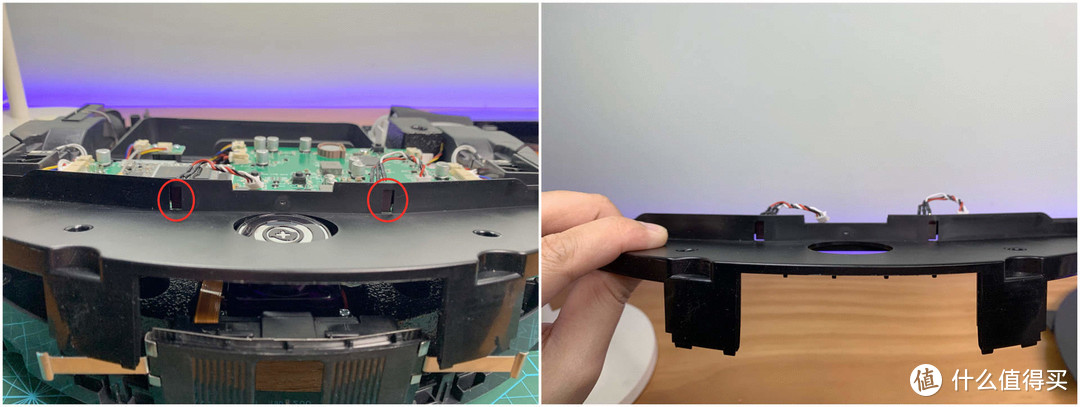
▲接着往下拆,发现激光矩阵模块盖板处左右布置有两颗红外线发射器(红圈)。这是和充电桩对接时定位使用的。

▲拆掉盖板,露出了机器的”大脑“--主控板。机身所有传感器都连接到主控板上。(此外,注意到机身内部还有3枚黑色铸铁配重块。用来在拖地时提供足够的下压力)
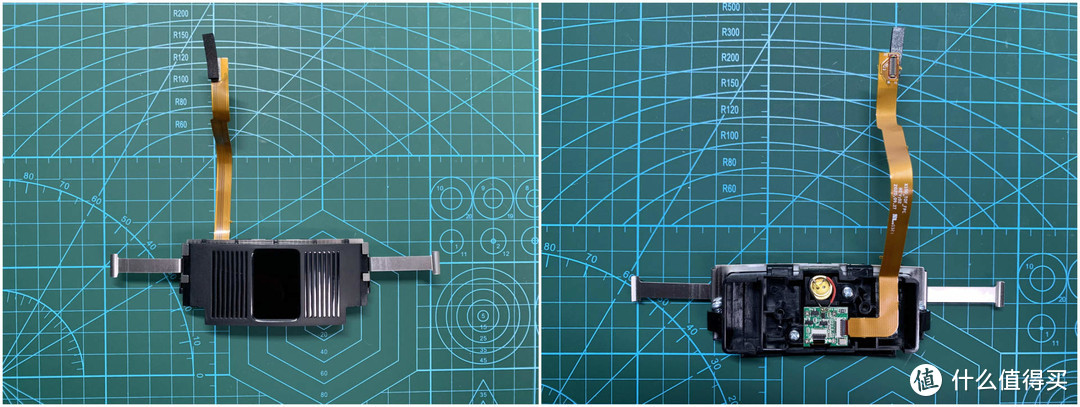
▲这是机器正前方110°激光旋转下方的第二个激光矩阵模块,它向机器正前方投射横向激光束,再通过摄像头捕捉生成3D空间扫描、来探测机器前方是否存在障碍物。(背景每个空格0.5cm,能看出大小)
激光矩阵模块三:正向110°扫描激光束
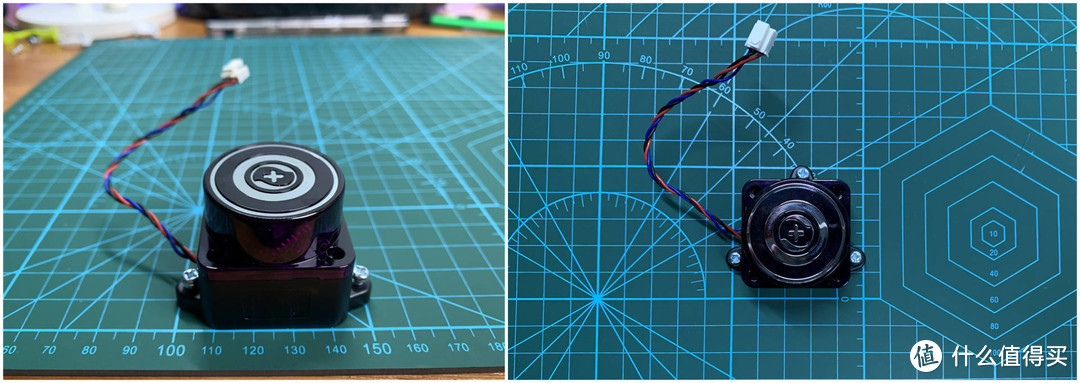
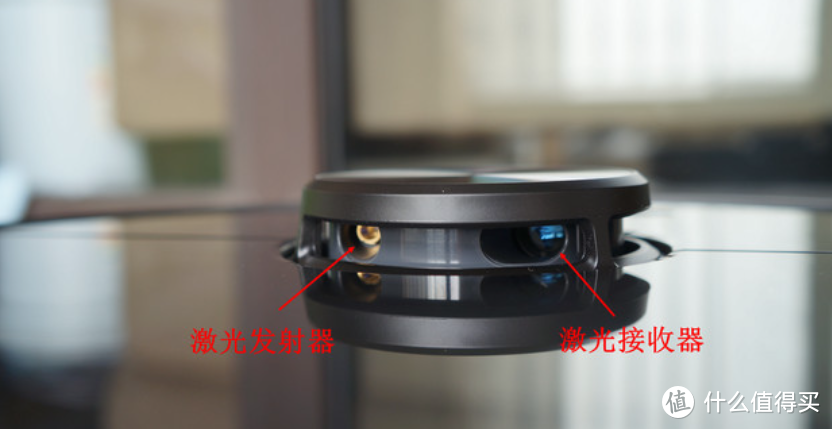
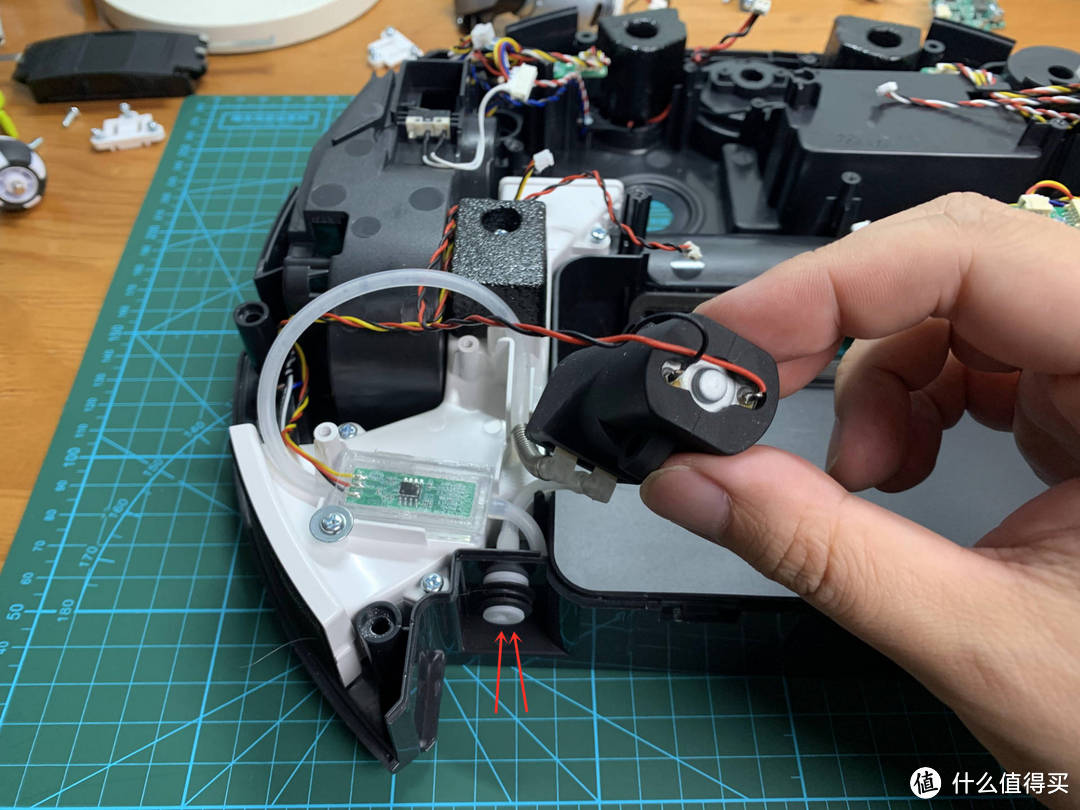
▲这是我见过目前最小的360°旋转激光投射器。只有5×5cm大小的面积。

▲这个模块非常像Wall-E的眼睛,一个发射激光束、一个光学接收器用来接收反弹回的光信号。
阶段总结:
360 x100 Max扫地机器人全面取消了其它扫地机上的沿边红外线和避障红外传感器,改用了精度更高的激光+dToF 3D避障技术。使自身规划清扫能力和避障能力得到质的飞跃。同时3目激光矩阵模块高度集成,使扫地机高度降低不少。
3.3 行走机构

▲左右驱动轮采用12V电机单独控制,电机上带有弹簧促使驱动轮始终贴于地面。当某个轮悬空后触发压力开关,这时会同步APP向用户发出轮子悬空的提示。

▲每个轮子(红圈处)都有一个转速传感器,系统通过控制电机输出转速来实现扫地机的灵活转弯,配合避障模块实现机动行驶。
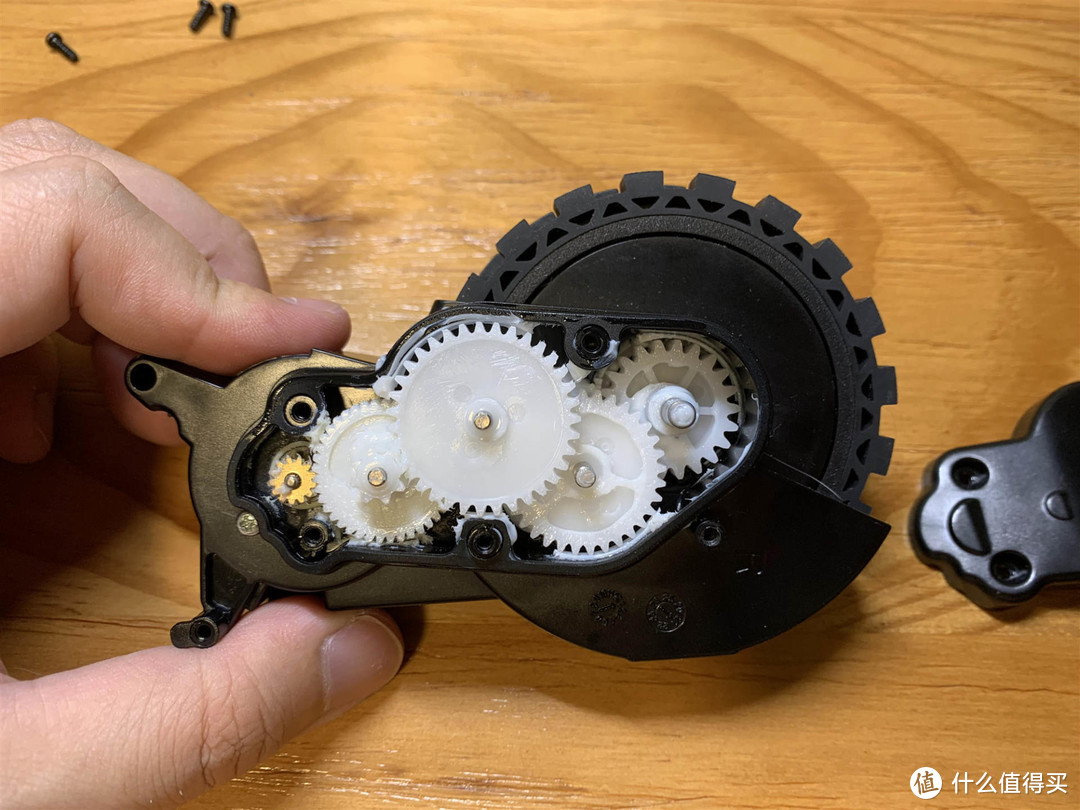
▲保护盖有密封圈,阻挡减速齿轮进灰。

▲这种左右花纹的胎纹能最大程度的提供抓地力的同时,还能有一定的脱困能力。
3.4 主板及其它附属物
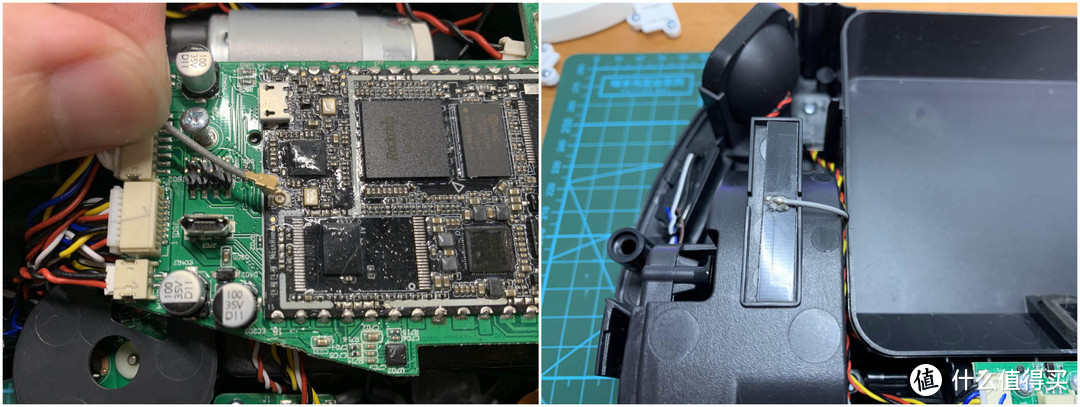
▲这是扫地机上的2.4GHz无线信号模块,负责接受和传送信息给手机APP。
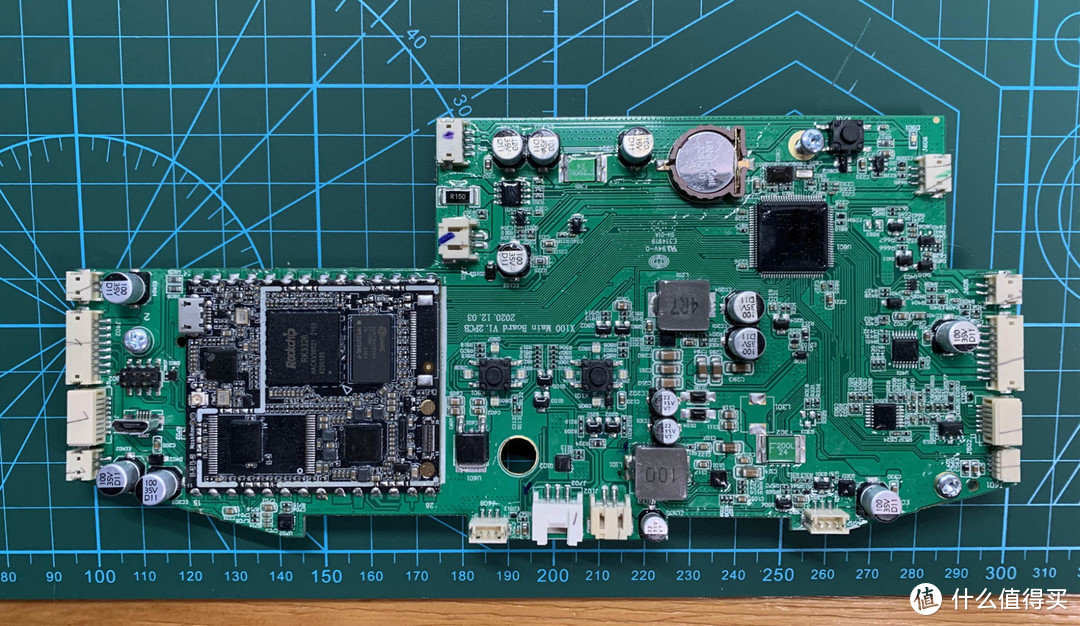
▲360 X100 Max的主控芯片是瑞芯微电子的,缓存为紫光国芯。但看不出缓存具体大小。整体做工非常工整。
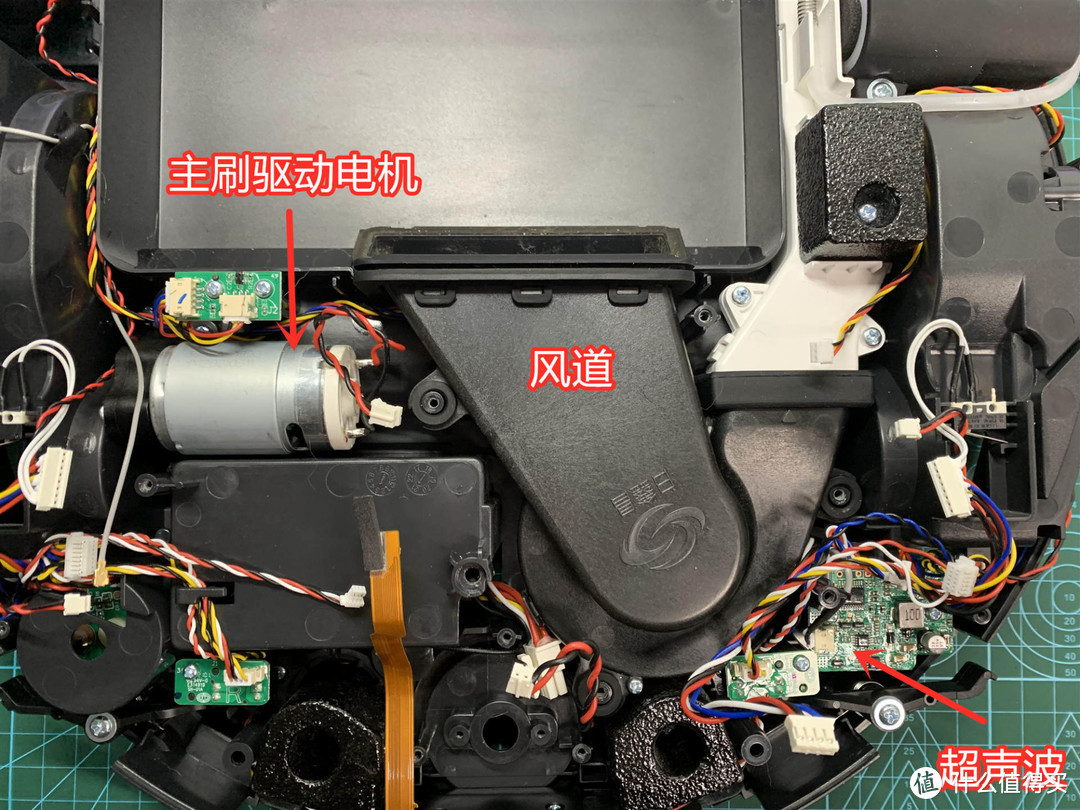

▲拿走主板后,底部有一枚超声波传感器,它负责探测地面材质。当检测到地毯,会触发地毯模式,提高吸力。

▲主刷电机采用了12V 5000转直流电机,通过皮带传递驱动力给滚刷。边刷电机为3~12V碳刷500电机。
3.5 风道设计
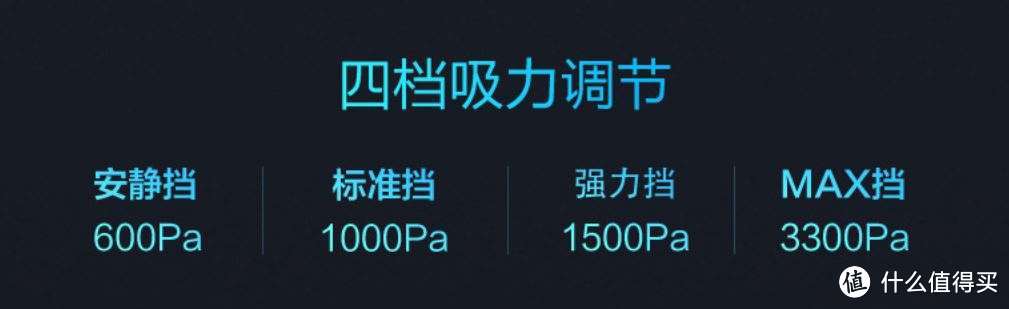
▲360 X100 Max拥有四档吸力调节。最高档的吸力能达到3300Pa。而它的噪音却能控制的很优秀,是怎么做到的呢?我们来看下。
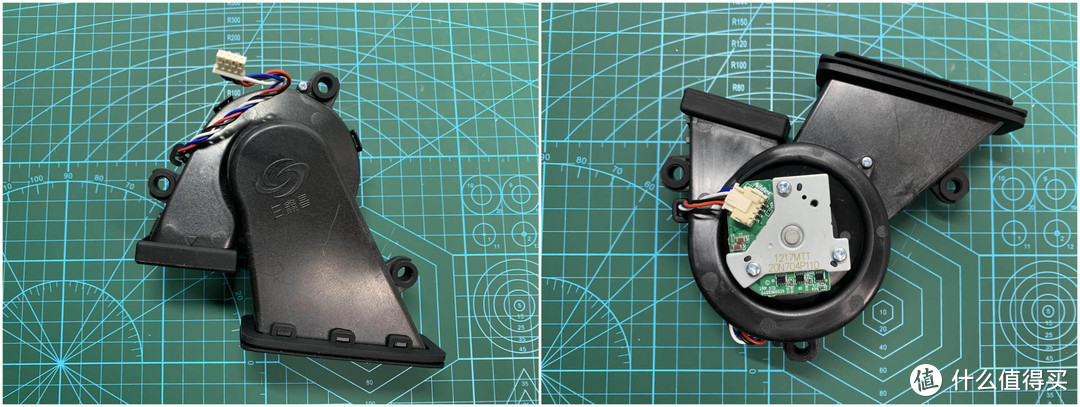

▲上图是360 X100 Max的风机模块,采用Nidec最大27000rpm转速无刷电机+风压涡流导向技术+悬挂式风机。能提供强大吸力的同时,悬挂电机能避免共振引发噪音。
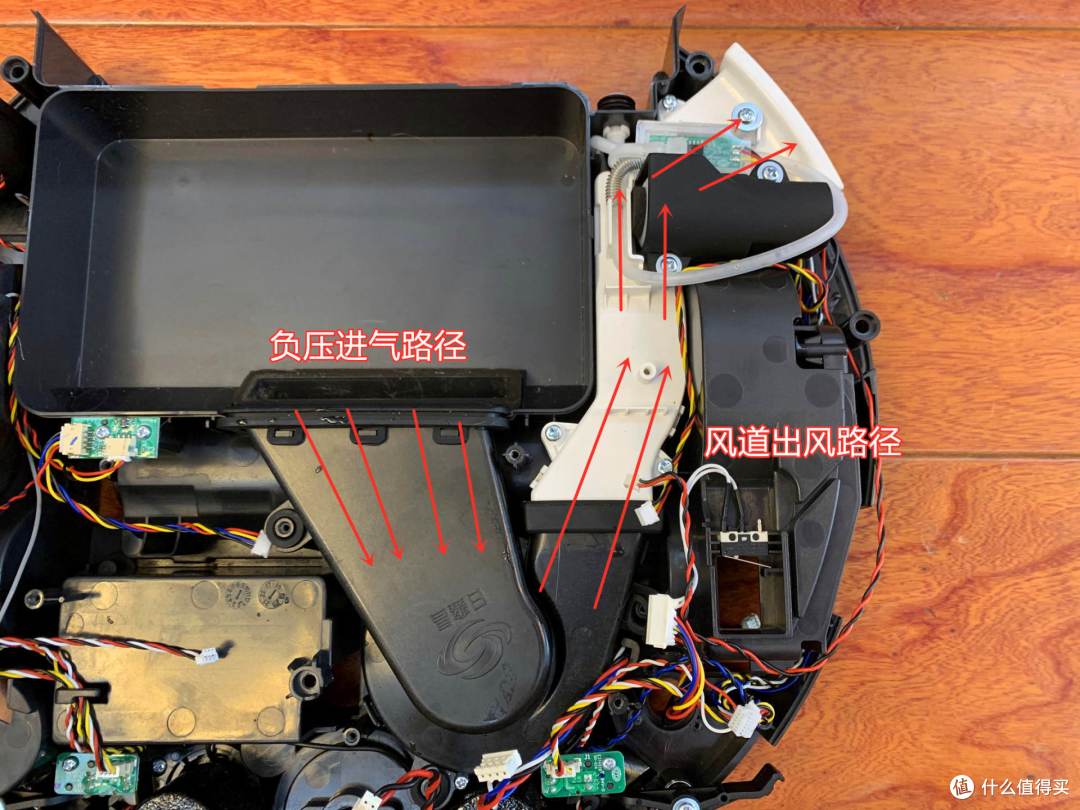
▲进风从集尘盒中抽取地面空气,再经过15.2cm长的整流风道进一步降低风噪。一般来说,进风道越短越有利于空气流动补偿,太长的话,风机载荷越大,转起来越费劲。打个比方如果拿半米长的吸管吸水,水还没到嘴里,人已经累的半死。
另外,对于出风道,虽然并不是越长越好,但太短也有两个不利因素,一是风机涡轮处噪音直接释放到机外,二是做降噪处理空间有限,有劲也没地方使。
再来说下360 X100 Max,它的风道长度适中,有一定的距离让部分噪声迂回抵消。

▲风道出风口有黑色消音棉包裹,降低风噪。即吸音又透气,不影响排风通气;
测试环节:
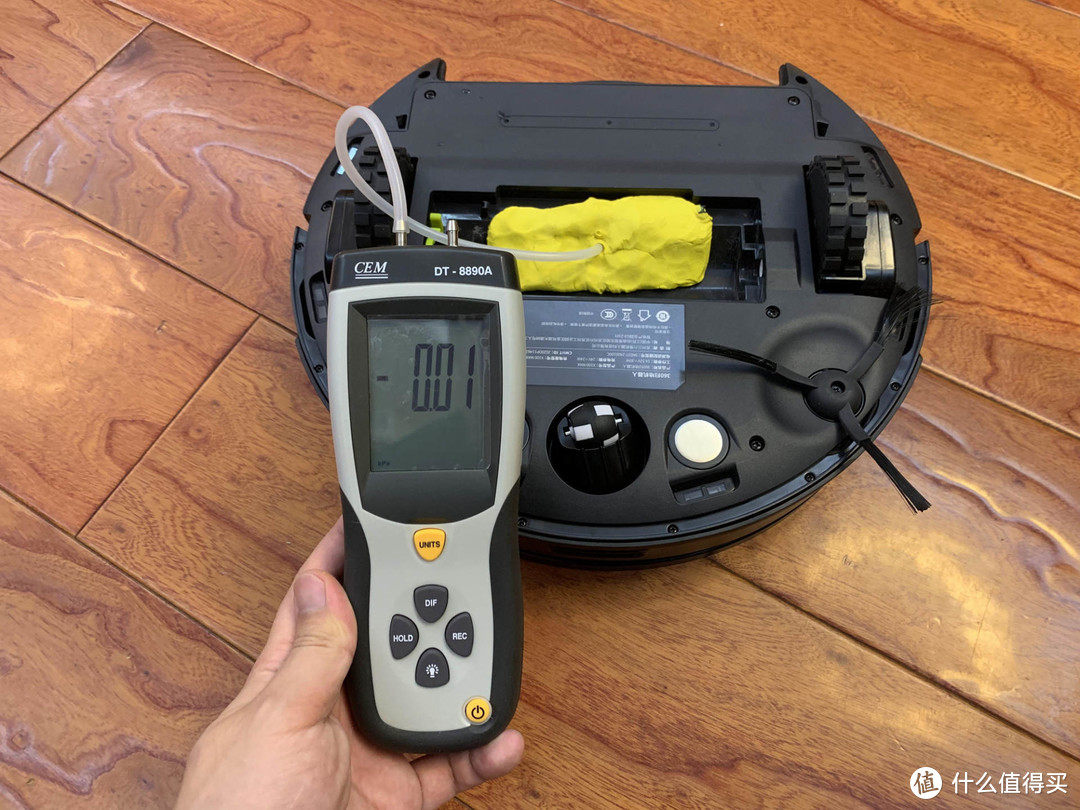
▲老规矩,使用电子压差表进行测试。扫吸口用油泥封堵,来测试这台扫地机的实际吸力如何。
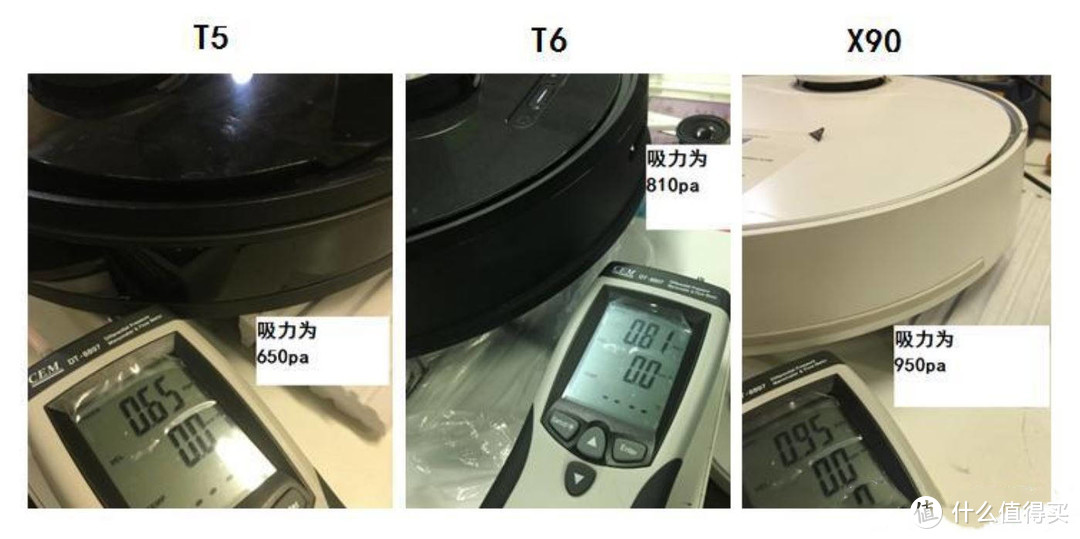
▲首先回顾一下我在2019年测的三款扫地机在标准吸力档位测得的实际吸力:
科沃斯T5: 650Pa
石头T6:810Pa
360 X90: 950Pa

▲官方宣传标准档位吸力为1000Pa。实际测试后,360 X100 Max在标准档位下实际吸力1190Pa(1.19kPa)。高于之前测的3款扫地机,它吸力还是非常能打的!最大吸力能达到3200Pa。
3.6 拖地模块
▲电控拖地模式采用了安装在风道上方的电控蠕动泵,来按照用户设定的出水量进行定量抽水。(四个出水档位)

▲最终出水由底部四个出水孔润湿拖布完成对地面的拖地工作。
四、总结

▲拆解完毕,主机体上还残留一些小的附件,如扬声器、尘盒放入检测传感器等我就不从盖上一一分离了。
最后全部复原,只多出一颗螺丝。其余功能全部正常。
从这次的拆解我总结以下几点:
1、360 X100 Max机身内部结构紧凑,最大限度利用了内部空间;
2、上盖无任何走线,线束都布置在机身下方、方便整机拆取。内部线束布置整洁;
3、目前市面上唯一使用三目激光矩阵的扫地机,且无顶部凸起。所以能做到9.5cm的超薄机身;
4、正向110°扫描激光矩阵体积小巧,只有5cm×5cm大小面积。
5、这台360 X100 Max依托三目激光矩阵+dToF模块,实测其扫地规划+避障能力非常优秀;
6、Nidec 27000rpm转速无刷电机+风压涡流导向技术+悬挂式风机+15cm适中风道长度+尾部黑色消音棉,拥有强悍3200Pa吸力同时、噪音显著降低。实测在标准吸力档位,强于其它三款扫地机。
这款360 X100 Max扫拖一体扫地机,可以说的上是最近非常值得入手的型号。
小编注:本文作者@abrams2415 是什么值得买首席生活家,他的个人自媒体信息为:
新浪微博: @abrams2415
















Jocelynzh
校验提示文案
巴伐利亚南大王
校验提示文案
黑色director
校验提示文案
值友6740959971
校验提示文案
里梦外梦轮回
校验提示文案
怡然自得210
校验提示文案
yasden
校验提示文案
木子加加
校验提示文案
AlexPiero
校验提示文案
辰桉
校验提示文案
值友9787413990
校验提示文案
赏你个大鸡腿
校验提示文案
瑞凌
校验提示文案
东风破了
校验提示文案
会飞的小猪猪00
校验提示文案
aelvin
校验提示文案
不是那个老毕的老毕
校验提示文案
爱吃鱼豆腐的喵
校验提示文案
牛哥有个小目标
校验提示文案
Isaac07
校验提示文案
枫苍漩
校验提示文案
惩罚与奴役
校验提示文案
_weng_
校验提示文案
xiguadaguaishou
校验提示文案
小懒懒爱睡觉
校验提示文案
ningning99
校验提示文案
特斯文
校验提示文案
宇5999
校验提示文案
剁手的节奏112
校验提示文案
feilin1860
校验提示文案
流精岁月日子
校验提示文案
值友3558932693
校验提示文案
新新快跑
校验提示文案
为此青春
校验提示文案
cbhb818
校验提示文案
高柳乱蝉
校验提示文案
花开终落
校验提示文案
aelvin
校验提示文案
sd99
校验提示文案
光大巡检
校验提示文案