








































































244
206
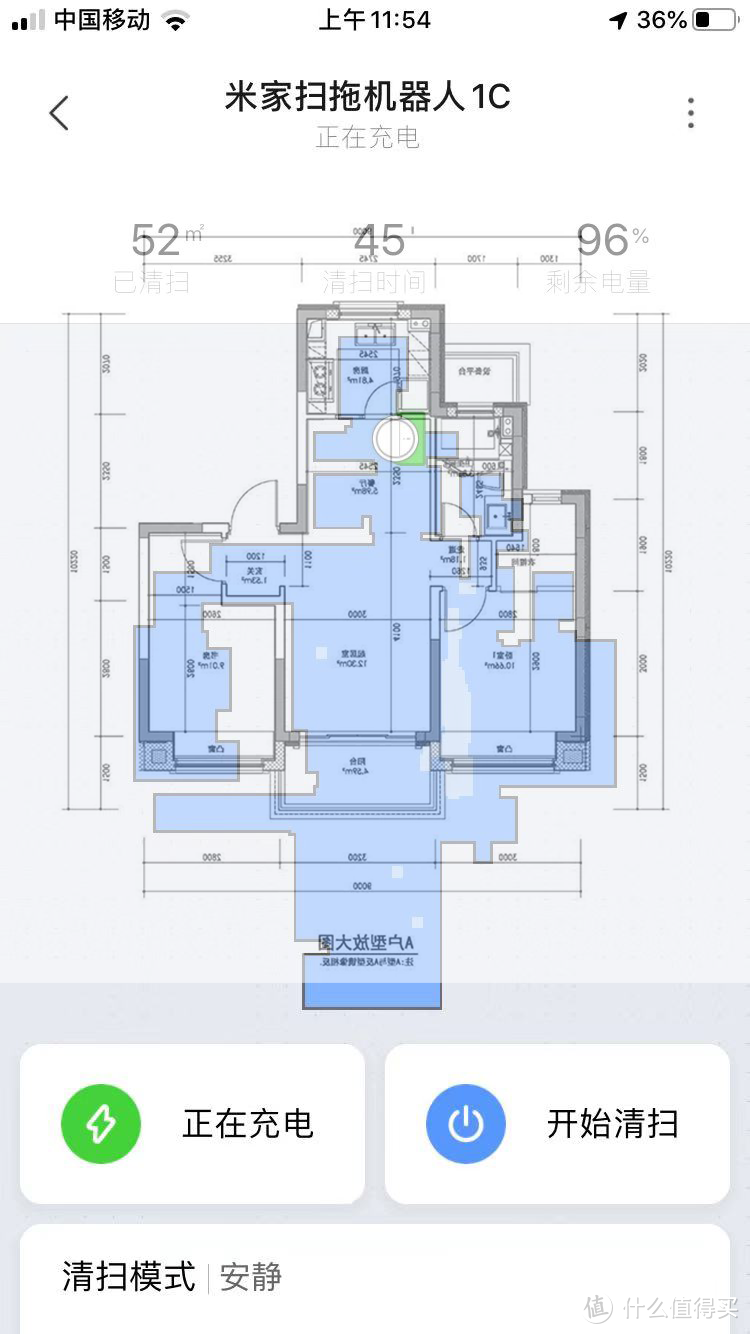
小米扫拖机器人1C的真实用户体验--凭空增加你家的面积,大到找不到回家的路。
2019-11-14 17:12:59
3点赞
1收藏
5评论
在smzdm上看了几篇大家对它的介绍,没看到什么大问题就在双11匆匆入手了。
选择它主要是因为下面几点:
是因为它高度小,只有8.2cm(我的床底下高度只有9.8cm)
是价格比iRoboti7实惠很多。(i7 3459)
自己没有用扫地机的经验,先搞个初级的扫扫盲。(最初是想买云鲸,但机身高度太高,并且拖把头干模式也偏湿,不适合天然大理石地面。)
看到有支持slam的介绍。(接触过这个领域,觉得能生成房间点云数据的话,不用雷达也罢,我没有黑天使用的需求)
结果呢,我入了坑了,目前正在跟售后沟通中,还没有得到回复。
如果无法解决,准备7天无理由退货了。
先说下我发现的问题,上一张图大家就都明白了。

如果一张还不够,在来一张。
机器是昨晚到的,试到今天也没有一次能返回去充电的,说实话我很伤心,我有一颗支持国产的心,却要逼着我投靠国外品牌。希望后面能等到小米&追觅的技术人员可以给我一个回复。
最后作为这个领域小白,有一件事很不理解,如下图,官方介绍的模拟神经网络算法,还有VSLAM算法,那应该是可以生成房间深度数据的呀。然后随着每次使用不断进化修正这个房间深度数据。 怎么到客服那里就变成每次都清空,每次重新动态创建地图了?IRobot7也是这样吗?

从一般使用者的视角来说,就是应该只有最初使用时,或房间布置发生变化时才会频繁碰壁,到后面会越来越好。不然每次都从来,不就等于视觉版乱撞机器人了吗。而且这样上面介绍的这些技术又体现在哪呢?目前和客服沟通下来的感觉也是第一次用和第一百次用是没什么区别的。是不是和iRobot的差价主要就是这里?
希望清楚这个领域的大哥大、大姐大们,快来指点下我这个小迷弟吧...















Terry--Yu
校验提示文案
cheerwold
然后,要让这货能安全回充,只能由充电座出发
最后,我的也是每次都重新扫描,商品详情图中说的保存估计是本次清扫过程中保存,文字游戏呢
校验提示文案
妈妈说只要白菜价
校验提示文案
Terry--Yu
至于那个vslam还有地图问题,回复的是明年初才会升级好。
校验提示文案
Terry--Yu
至于那个vslam还有地图问题,回复的是明年初才会升级好。
校验提示文案
妈妈说只要白菜价
校验提示文案
cheerwold
然后,要让这货能安全回充,只能由充电座出发
最后,我的也是每次都重新扫描,商品详情图中说的保存估计是本次清扫过程中保存,文字游戏呢
校验提示文案
Terry--Yu
校验提示文案