






















































131
80
极客的玩具——HEXA可编程机器人初上手
2018-12-13 11:15:00
14点赞
19收藏
4评论
前言
作为一个(伪)极客,我从这玩意儿还在京东处于众筹阶段就开始关注;说实话,包括我在内的绝大多数人如今一听到“机器人”这三个字就会觉得头大,毕竟这年头一个带轱辘的安卓平板都可以被叫做机器人(比如某个叫“巴迪”的货)然后拿出来卖,市场上充斥着太多打着“机器人”名号滥竽充数的产品,反倒是HEXA的面世在当时让我眼前一亮,至少在我心中,这货更符合我对“机器人”的定义。
外观&配置
HEXA的包装很简单,也没太多好说的;我买的是附带无线充电底座的版本。HEXA的外观还是挺有极客范儿的,整体而言比较简洁也没有复杂的几何外形,之前看过不少报导把它形容成蜘蛛,我拿到的时候第一眼想到的反而是《攻壳机动队》里面的那台斑陀螺。

视觉主体就是这个白色的塑料外壳,我们姑且叫做头的部分,Y字形前脸里面能看到位于底部的附带夜视功能的摄像头,中间的红外发射器和顶部的两枚距离传感器,此外头顶还有一枚用作状态展示的LED指示灯,整个头部可以像主战坦克的炮塔一样360°旋转。
 HEXA的视觉传感器是一枚720P分辨率,支持拍照、录像及夜视功能的的摄像头
HEXA的视觉传感器是一枚720P分辨率,支持拍照、录像及夜视功能的的摄像头
 围绕头部一圈的是6只仿生足,整体采用的是类似硅胶的材料,每只足都有独立的舵机,且有3个独立的可活动关节
围绕头部一圈的是6只仿生足,整体采用的是类似硅胶的材料,每只足都有独立的舵机,且有3个独立的可活动关节
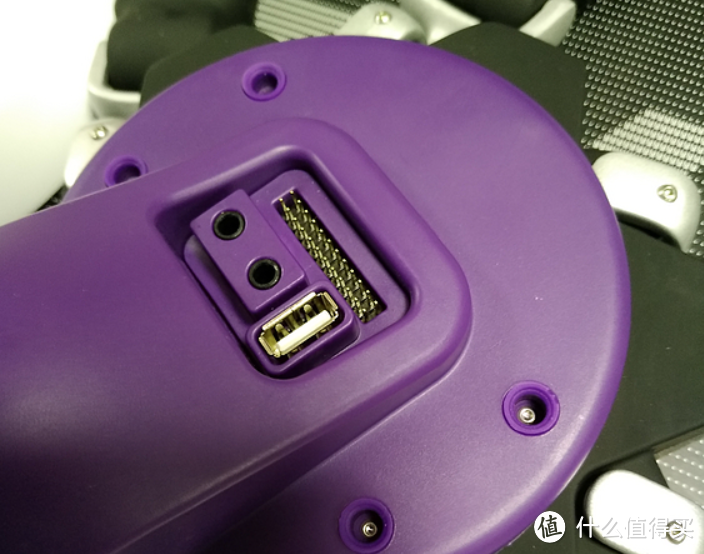 掀开白色的头盖骨,在“脑”的部位能看到一堆可扩展接口,包括1个USB2.0接口、2个3.5mm I/O接口、1个GPIO接口
掀开白色的头盖骨,在“脑”的部位能看到一堆可扩展接口,包括1个USB2.0接口、2个3.5mm I/O接口、1个GPIO接口
运动性能
很明显,将HEXA设计成6足仿生的形式而非双足、轮式或履带底盘的原因就是为了更好的运动性能或执行多种任务的灵活性。
速度方面,为了增加复杂机械结构的耐久度以及防止过快的舵机活动出现故障,官方给出的最大速度是将近10厘米/秒,所以不用指望HEXA能像雷速登一样在五连发卡弯做出漂亮的惯性漂移。
6只足部每只都可以达到12厘米步长,最大离地间隙可达10厘米,这使得HEXA能够轻松攀爬接近角大于90°,最高超过14厘米的任意形式障碍物,足尖部分使用的摩擦力充足的类似硅胶的材料也赋予HEXA在绝大多数铺装和非铺装路面的越野能力,此外它还有探洞模式可以让HEXA的6只足在身体两侧排成一字形,以供其通过较为狭窄的地形。

操作
HEXA可以使用手机或PC进行遥控操作,当使用手机操作时只需通过App Store或安卓的应用商店下载HEXA App注册登录,后续按照提示操作即可完成产品的激活。

手机与HEXA的连接方式分为两种,两种方式对应着有无Wi-Fi的两种环境:
1. 当处在Wi-Fi环境中,可以通过手机上的HEXA App让HEXA与手机接入同一个Wi-Fi节点处于相同局域网内。
2. 野外或其他无Wi-Fi环境中,HEXA本身可以作为无线热点,然后手机通过无线直连的方式连接至HEXA进行遥控。
两种连接方式的具体效能上没什么太大差别,同时也让HEXA的活动范围和使用场景得以拓展;操作界面也是简单易懂,右下角的左右向摇杆可以控制头部的转动获取动态视角,左下角的万向摇杆则用来控制HEXA的方向,学习成本很低。

Skill
简单的遥控操作并不是HEXA真正的精髓所在,HEXA最大的价值之一就是可以允许用户自主编程的属性。
简单来说,Skill就是让用户可以自己通过图形或语言编程的方式,预先编写好HEXA的动作,将Skill导入HEXA中就能让HEXA根据预先编写的指令自主行动。
在HEXA App的功能菜单里能看到两个由厂家提供的缺省Skill:Dance和Explore,在App的底部Bar的位置有一栏“Skill商店”,用户可以从中下载或购买其他玩家编写好的Skill,同理,你也可以自己通过图形或语言编程的方式编写Skill并上传至这个Skill商店中供其他HEXA用户下载或付费购买,例如在Skill商店中可以下载到一个名为“Bullfighting”(斗牛)的Skill,简单来说这个Skill可以允许HEXA旋转头部,通过摄像头找到“红色”的目标并且朝其冲过去,具体的效果很好也确实是个好玩的Skill。

开发&编程功能
为了给HEXA赋予更多的可玩性,厂家为机器人和编程爱好者提供了一套基于Linux的,可自行编程的操作系统并将其命名为“MIND OS”。
零基础初学者——图形编程
可以说,“可开发、可编程”这个属性才是HEXA最大的精髓和价值所在,而实现编程的其中一种方式便是通过PC端下载HEXA专用的模拟器“Simulator”(这里吐槽下官网上这个模拟器的下载链接,实在是太难找了)
首先,即便你并没有购买HEXA也可以下载并使用这款模拟器,在模拟器中,用户可以非常简单的用鼠标直接搭建一个3D的虚拟环境并对HEXA的所有可活动部分进行编程,只需要简单使用鼠标直接拖拽每条腿上的3个关节中的任意1个关节并调整它的运动轨迹。

如果你购买了一台HEXA,则可以直接将其与模拟器连接搭建出一个开发平台,你在模拟器中所有的操作都会即时反馈给HEXA的实机,通过图形编程创建的动作可以导出成.vsm文件并可编写成Skill上传至Skill商店中。
进阶玩家——Go语言编程
对于进阶玩家而言,除了通过模拟器的图形编程方式以外,HEXA更有价值的部分便是对于语言编程感兴趣的玩家可以直接使用Go语言对HEXA进行编程。
老实说,在硬件开发上使用Go语言真的是很少见,不像耳熟能详的使用Python进行开发的树莓派,Golang作为一种相对较新的开发语言,其上手难度也相对较低,近几年也有逐渐流行起来的趋势,总的来说是一个不错的选择。
例如你可以使用下面的ready()功能让HEXA的头部旋转至默认初始位置并移动足部使其站立:
func ready() {
hexabody.Stand()
hexabody.MoveHead(0.0, FAST_DURATION)
go hexabody.MoveLeg(2, hexabody.NewLegPosition().SetCoordinates(-100, 50.0, 70.0), SLOW_DURATION)
hexabody.MoveLeg(5, hexabody.NewLegPosition().SetCoordinates(100, 50.0, 70.0), SLOW_DURATION)
go hexabody.MoveJoint(0, 1, 90, SLOW_DURATION)
hexabody.MoveJoint(0, 2, 45, SLOW_DURATION)
go hexabody.MoveJoint(1, 1, 90, FAST_DURATION)
hexabody.MoveJoint(1, 2, 45, FAST_DURATION)
}
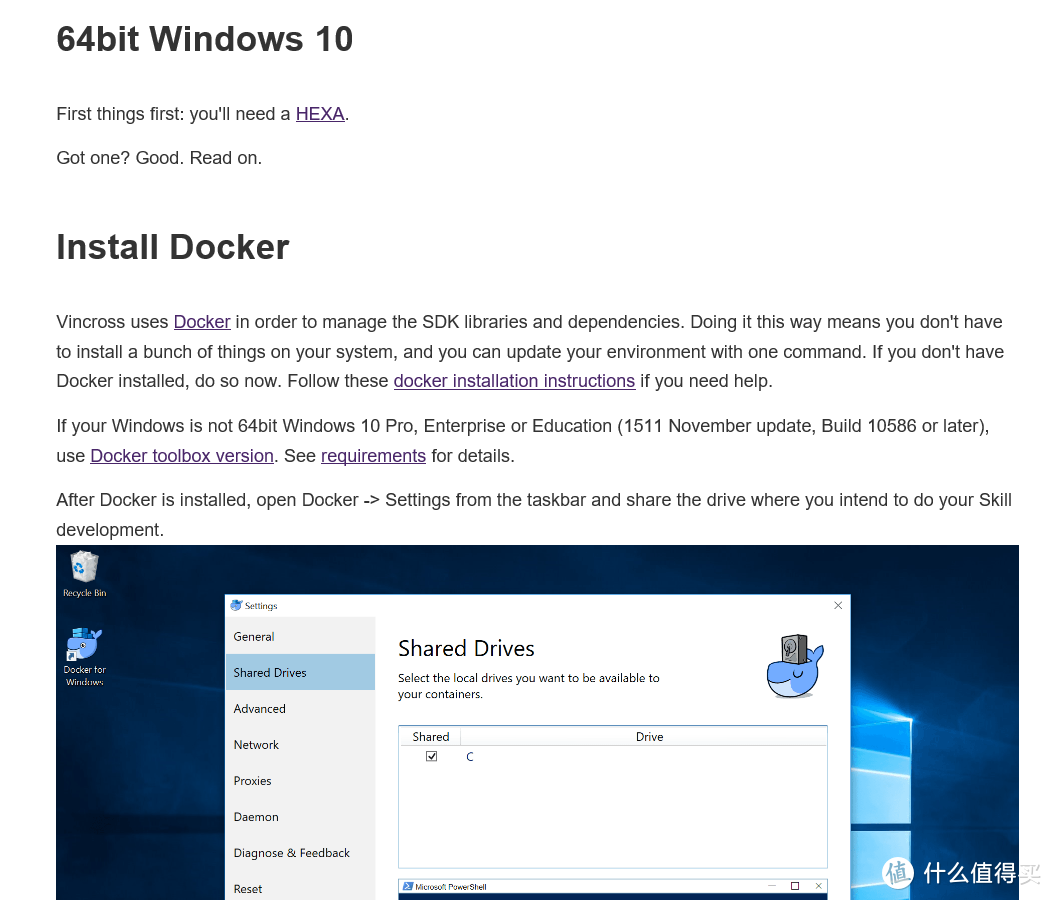
HEXA的语言编程对于极客玩家或者编程爱好者而言可以说支持的相当到位而且更扩大了HEXA的可玩性,为此厂家也提供了非常详尽的SDK开发文档和Api说明,GitHub上也有基本的Demo。
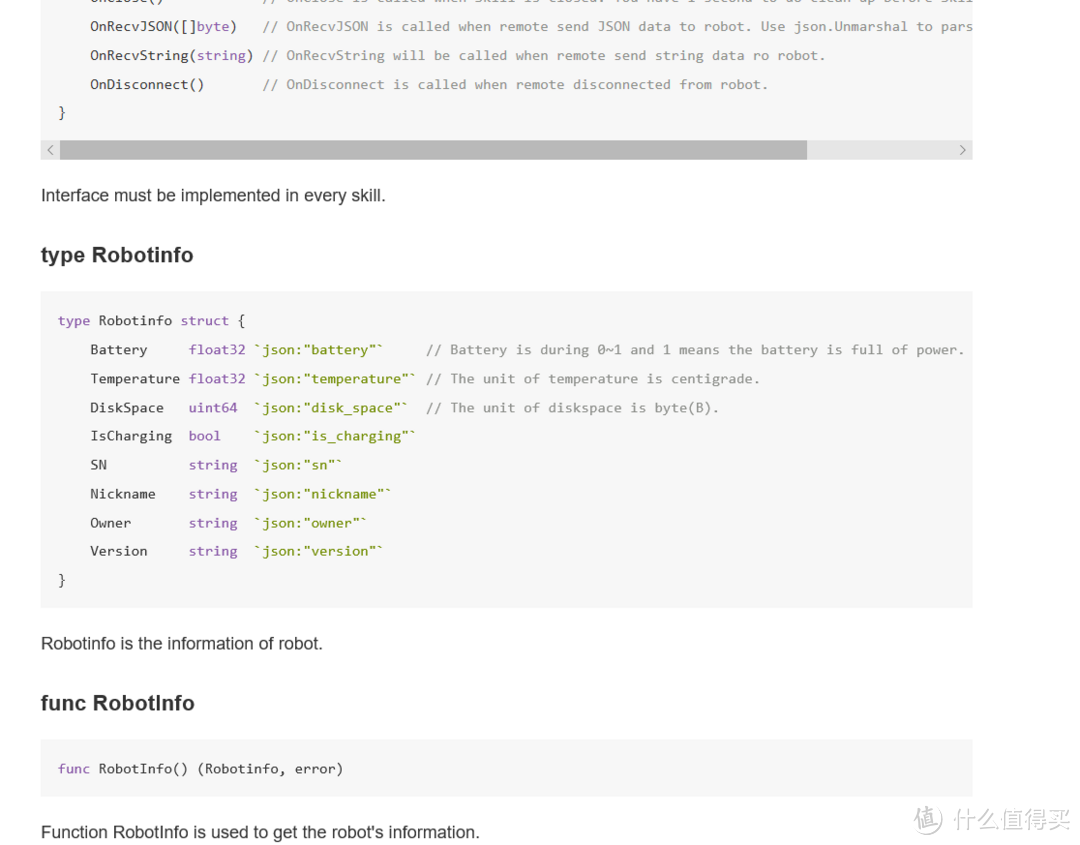
从如何安装Docker到怎么创建Skill、如何将图形编程的结果导出成.vsm文件并且对其进行二次编程、再到如何通过GitBook上传你自编的Skill都可以在其中找到对应的内容,可以说是一应俱全了。
极客的浪漫
之所以最后才介绍HEXA这款产品的可玩性,是因为某种意义上这是最难的一部分:HEXA并不像大疆或Roomba这种实机功能性非常明确的品牌,HEXA并不能直接用来拍电影或者去扫地;然而,这或许也是HEXA最大的可玩性——开发。
就像最早在二战时期的阿兰·图灵创造计算机只是为了破解纳粹德国的恩格玛密码一样,没人知道今天计算机几乎什么事儿都能干;HEXA为所有感兴趣,喜欢编程的极客或者爱好者提供了一个非常好的开发平台,作为初代产品HEXA目前仍有很大的局限性,但是我们已经可以从中看到一些端倪:可扩展的硬件接口、可自行编程的OS都表明这是一款潜力很大的产品,也许几年后的第3代、第4代产品就会能够实现“装一个螺旋桨就能改造成直升机,或者安一个尾鳍变成潜水艇”这种操作。
总结
总的来说,HEXA并非很多人想象中的“功能不明确”的毫无实用性的机器人产品,不论是HEXA本身硬件的高度扩展性,还是可以通过MIND OS开发编程的属性都在说明:某种意义上HEXA不单纯是一个“机器人”而是一个可以继续深挖,潜力十足的开发平台,然而作为初代产品的局限性以及很高的定价(目前看京东有500块的优惠,标配版5999/无线充电版6499)也着实让HEXA成为了一个只能针对极客、编程爱好者、甚至从事机器人相关研究领域从业者的小众产品。
从大局上来看,HEXA的研发方向和市场定位我个人认为是非常准确而且成功的,也许待到这个市场更加成熟、感兴趣的人更多了以后,再通过扩大产能推出价格更便宜的产品时,其真正的意义才会显现出来。


















xloong
校验提示文案
星木海
校验提示文案
littleboyzhou
校验提示文案
狼蛛
校验提示文案
星木海
校验提示文案
xloong
校验提示文案
狼蛛
校验提示文案
littleboyzhou
校验提示文案