

























































43
62
你真的知道扫地机器人怎么选吗?(看完还不知道怎么选可以顺着网线来打我)
2021-11-09 14:43:57
5点赞
6收藏
7评论
选扫地机器人之前,先来个灵魂一问:你知道你需要一个什么样的扫地机器人吗?
早期的扫地机器人规划方式差、不智能、老碰撞、拖地水箱太小、拖地效果差,现在的扫地机器人已经经过几轮的更新换代,功能也越来越强大,很多复杂的环境清洁需求都能得到满足。虽然现在扫地机器人提供的功能有很多,但是也有很多功能可能不是你真正用得上的,希望这篇文章能帮你学会怎么挑一台最适合自己的扫地机器人,也能少花一点冤枉钱。
接下来将给大家带来2021最全的扫地机器人攻略,希望能给大家选购提供一点帮助,大家如果带着以下几个主要需求来的阅读的话,收获可能会更大一点。
1、日常清洁是灰尘居多还是毛发居多?
2、清洁环境地毯面积大吗?
3、除了扫地之外,有拖地需求吗?
4、有拖地需求的话,拖地需求很强烈吗?
5、有避障需求吗?
6、除了扫拖之外,还想更加解放双手吗?(自动集尘、拖布自清洁)
详细介绍之前,先来个简洁版的介绍:
1、选滚刷:毛发多选胶刷,少缠绕;灰尘多选毛刷,清洁强。
2、选吸力:不要迷恋大吸力,日常清洁1800Pa即可,毛毯清洁可选2500Pa即可。
3、选避障:首选dTof避障,次选AI避障。
4、选路径规划:避开随机式、陀螺仪导航;视觉导航也需谨慎,激光导航最推荐。
5、拖地需求:首选高速旋转拖地,次选震动强擦,常规选贴合拖地。
6、地毯清洁:首选智能升降,次选超声波检测,自动增压也很重要。
7、进一步解放:选自动集尘、拖布自清洁。
一、选滚刷
常见的扫地机器人滚刷又两种:毛刷、胶刷,还是有一种就是比较少见的纯吸口(就是没有滚刷),胶刷又分为软胶刷、硬胶刷两种,滚刷又分为单滚刷、双滚刷。
 上:毛刷,下:绞刷
上:毛刷,下:绞刷
毛刷与胶刷的主要区别在于:
毛刷在处理灰尘方面比较优秀,例如缝隙的灰尘,稍微顽固一点的灰尘都可以清理掉。
绞刷在处理毛发方面比较优秀,毛发太多的情况下不易发生缠绕的情况。
 毛刷清理灰尘
毛刷清理灰尘
所以如果家里灰尘偏多的建议选毛滚刷的,毛发偏多的就选绞刷。
绞刷其实还分为硬绞刷+软绞刷两种,一般推荐软绞刷,因为硬绞刷在遇到硬物之类的话有一点的概率会磨损。
当然了现在有些滚刷直接配置了双滚刷了,清洁效果也会更好一点:
 双滚刷
双滚刷
除此之外就是比较少见的无滚刷,纯吸口方式的,这种处理毛发起来当然是很优秀了,直接一吸就走,不过由于单存靠吸的方式,吸力要求就要更高一点,不然灰尘的缝隙,地毯的清洁都会打折扣。
 纯吸口,无滚刷
纯吸口,无滚刷
二、选吸力
吸力,是一个重要的内容,但是又不那么重要,因为现在的扫地机器人吸力上都是足够满足需求的了,吸力清洁能力对照表可以参照下方:
600Pa:灰尘
1000Pa:小米
1500Pa:黄豆
2200Pa:钢珠
也就是说,日常的清洁,其实2000Pa就足以满足需求了,只不过现在扫地机器人都在内卷,拼谁吸力大,大家千万不要去单纯的关注大吸力。
三、选避障
我个人觉得避障功能是一个值得关注的功能,如果没有避障功能的话,扫地机器人在清洁的过程中遇到障碍物(如椅子、凳子、宝宝玩具等)就会尝试的去撞走,如果一些品牌的算法不行的话,就会一直撞,直接撞到墙角、沙发底下之类的,所以像家里有宝宝之类喜欢乱扔玩具的话,是需要重点关注一下的,好的避障扫地机器人表现如下:
 避障五倍速
避障五倍速
扫地机器人避障目前主要有两种,一种是AI避障,一种是dTof避障,AI避障是通过结构光测距在结合算法来进行避障的,但是在强光的情况下可能会受影响。dTof则不会受强光的影响,但是识别率可能会偏低一点,也就是有一点的概率识别有误,但是整体下来我还是推荐dTof的,因为dTof的实际表现并不差,而且预算也会低很多。
四、选路径规划
扫地机器人的路径规划方式主要分为四种:随机式、陀螺仪导航、视觉导航、激光导航,选一个好的导航方式才能尽量减少乱扫、漏扫情况。
随机式、陀螺仪导航的直接忽略掉就行了,这两个属于可以淘汰的规划方式了,所以看到请直接绕开就行了。
 一般商品信息里面都会说到路径规划技术
一般商品信息里面都会说到路径规划技术
视觉导航是比上两者稍微好一点的导航方式,缺点就是灯光太暗或者灯光太强都会影响正常工作,所以这个方式其实也是不太建议的。
目前扫地机器人路径规划最好的方案就是激光导航,目前千元以上的正经扫地机器人也都能配有激光导航的了,所以大家尽量选激光导航的就对了。
五、拖地需求
如果家里已经有一台专门拖地的扫地机器人或者洗地机等无拖地需求的话,也就是只想要一台扫地机器人的话,那2000以内就能选到比较不错的扫地机器人了,如果需要兼顾扫地+拖地需求的话就需要多多关注一下几点啦。
首先,扫地机器人水箱一般分为仿生水箱、电控水箱两种,仿生水箱的水是不可控的,也就是会一直往外渗水,对于木地板的清洁来说很糟糕,不过这种水箱一般都是在低端扫地机器人才配置的,所以有拖地需求的请直接避开这种,选电控水箱就对了。
其次扫地机器人的拖地方式主要分为几种:
A:贴合强拖,也就是整个拖布是贴合在地上的,然后直接从开始拖到结束,这种方式做个日常的简单清理是没问题的,但是遇到稍微顽固一点的污渍就无能为力了,而且遇到大面积的清洁时,拖布也肯能会变得很脏,清洁效果更弱。
B:震动强擦,这个就是拖布在工作的工程中会伴随着前后的高频震动摩擦,这种方式对于短期内形成的污渍清洁效果也还是可以的,但是在遇到大面的清洁时,依然会出现拖布越拖越脏的情况。
 震动强擦
震动强擦
C:高速旋转+向下施力,这种方式是目前扫地机器人清洁最好的方案了,简单一点说就是模拟人工拖地的方式,可以说是比人工拖地还要好(至少比我拖的要好),而且一般清洁方式的扫地机器人一般都是支持拖布自清洁的,所以效果也会更好。

如果清洁需要非常强的话推荐方案C,次选B,拖地需求不高选A。
六、地毯清洁
家里有地毯的话可以关注下这一点,没有地毯清洁需求的话可以直接忽略这一点。地毯的清洁需求一般是只扫不拖(避免打湿地毯),所以这个时候就需要关注一下提供什么样功能的扫地机器人体验会好一点。
首先是扫,由于地毯跟地板不太一样,灰尘毛发缠在毛毯里面是不太好处理的,一般这种情况下吸力是调整是最大是最合适的,但是如果需要人工介入,盯着扫地机器人,等一上地毯就调大吸力,一离开就调小吸力就很麻烦,所以选一个可以自动增压功能的扫地机器人就很有必要,自动增压就是扫地机器人会智能识别是否清洁地毯,遇到地毯就自动调整吸力,离开地毯也会自动调回吸力,这样使用体验就会很好。
接下来是不拖,不拖地毯的解决方案有几种:
A:设置禁区,给每块地毯单独设置禁区,这样扫地机器人拖地的时候就可以避开了,这种属于最次的做法。
 手机APP编辑地图设置禁区
手机APP编辑地图设置禁区
B:自动识别,也就是自动识别到地毯之后直接绕开,不用你设置禁区了,这种也是目前最常见的做法。

C:智能升降,这个也是基于自动识别之后,自动把拖地组件整个抬起,然后越过地毯,这种方式比绕过的方式更加节约时间,如果家里有过户地毯的话,这种方式是可以直接越过继续工作的,这种方式是目前最好的处理方案,只是一般价格都要贵一点。
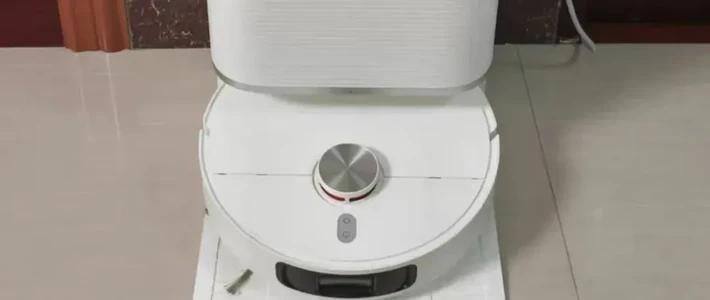
 遇到地毯自动升起拖地组件,离开地毯降下组件
遇到地毯自动升起拖地组件,离开地毯降下组件
七、进一步解放双手
近两年,扫地机器人为了进一步满足懒人需求,还提供了不少更进一步解放双手的功能,主要有以下几个:
A:自动集尘,正常情况下,扫地机器人清扫完成之后需要去手动清理尘盒,灰尘较少的情况下也可以2-3次清理一次尘盒,自动集尘功能就是可以在扫地机器人每次清扫完成自动自动将灰尘吸入到尘袋中,这样就只需要大概一个月左右才需要清理一次尘袋,而且是把尘袋直接扔了换个新的即可,唯一的缺点就是官方的耗材一般都卖的挺贵的,好在万能的淘宝有平替。
 自动集尘
自动集尘
B:拖布自清洁,前面说到拖地需求的时候有提到一嘴,拖布自清洁是指扫地机器人在拖地的过程中,会回到基站自己清洗,清洗干净了之后回到之前的位置继续拖,这样就能保持拖布是干净且湿润的状态,拖地效果最好,也免去了洗抹布的烦恼,有些扫地机器人还能提供烘干功能,这样就连晾拖布的步骤都可以省了。
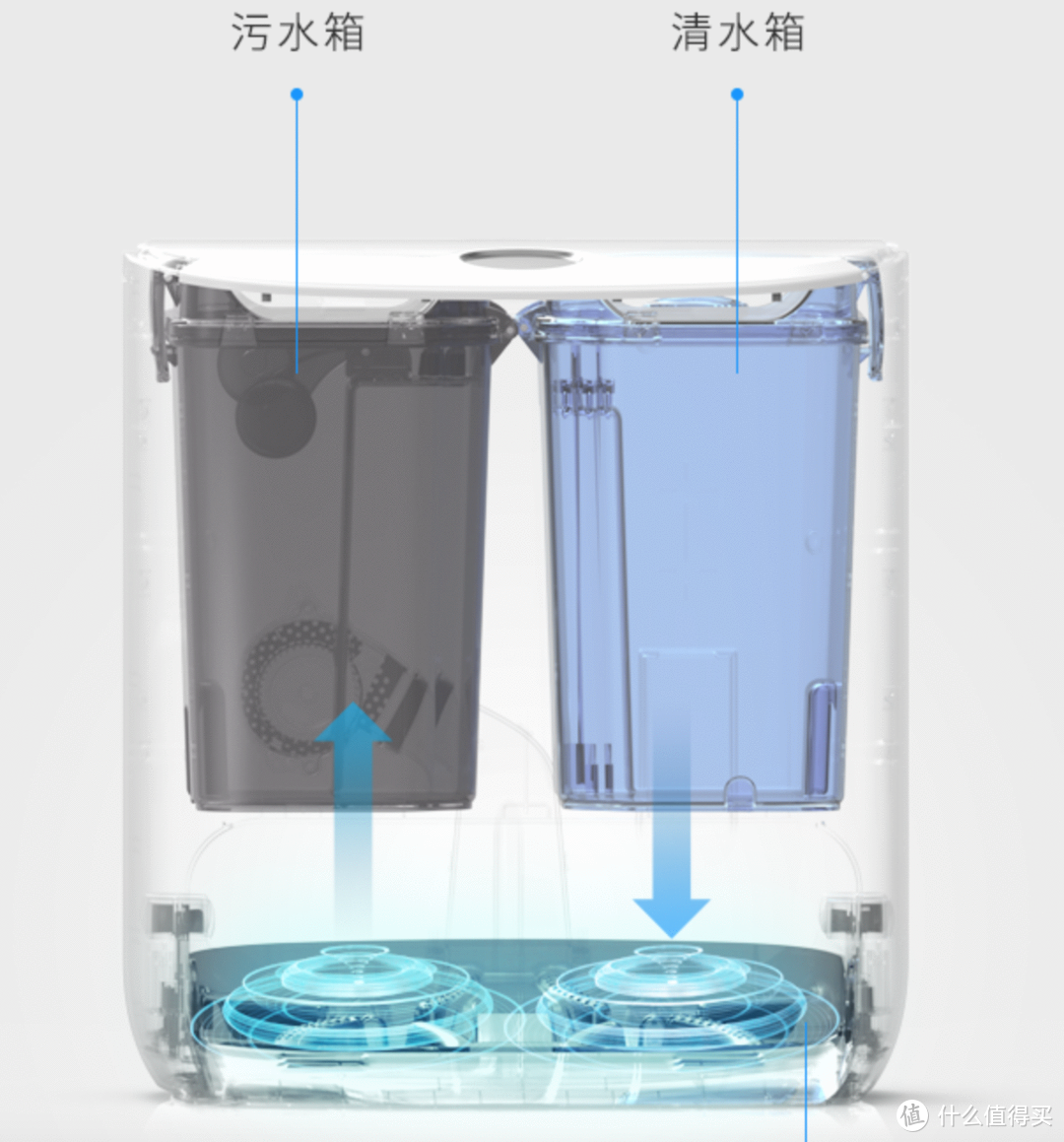 清水箱提供清水给拖布清洁,同时将污水吸入污水箱
清水箱提供清水给拖布清洁,同时将污水吸入污水箱
C:自动上下水,这个是在B的基础上更加的解放双手,B方案虽然可以不用清洗抹布了,但是往清水箱加水和给污水箱倒水是不可避免的,自动上下水可以将扫地机器人想象成是一个洗衣机,把清水箱接入水龙头,污水箱接到排污口,这样工作的时候就能自动加水跟自动排水了,更加进一步的解放双手。
看到这里基本上对于选购的建议已经结束了,接下就是很重要的扫地机器人型号推荐啦。
开玩笑的,写的有点久,累了,型号推荐下次再补上吧。

















司丞
校验提示文案
周花花
校验提示文案
咿呀咿呀嘿
校验提示文案
九日月
校验提示文案
九日月
校验提示文案
九日月
校验提示文案
九日月
校验提示文案
咿呀咿呀嘿
校验提示文案
周花花
校验提示文案
司丞
校验提示文案