











































































243
204
DIY之我的六足机器人
2015-12-08 22:00:20
124点赞
209收藏
99评论
作为工科男
不做点高精尖的东西出来怎么行
于是某次撑着趁着某个活动的东风,做了这么一个玩意儿出来
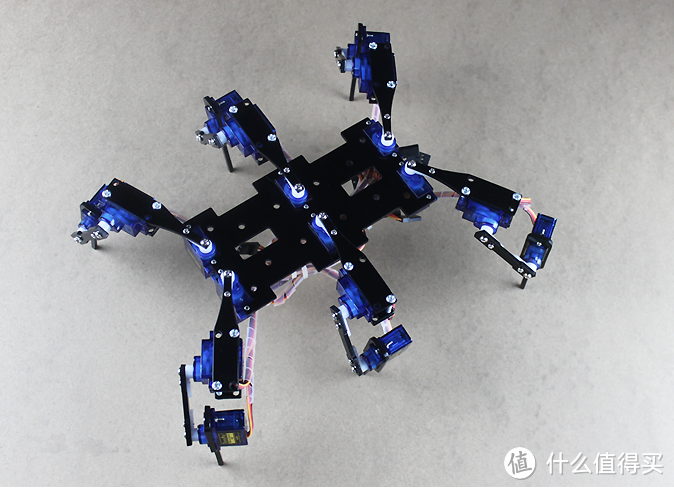
登登~遥控六足机器人!
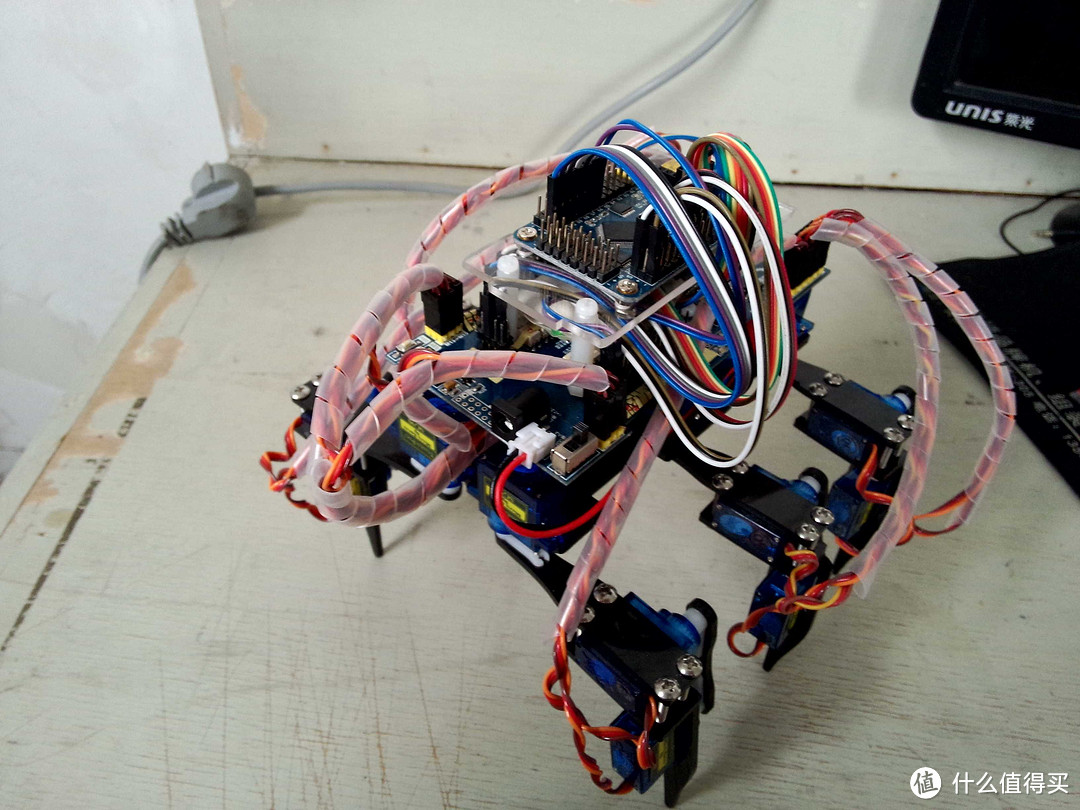
就是这么一个家伙
先把这家伙肢解了。。。。啊不,还没组装起来的照片贴出来

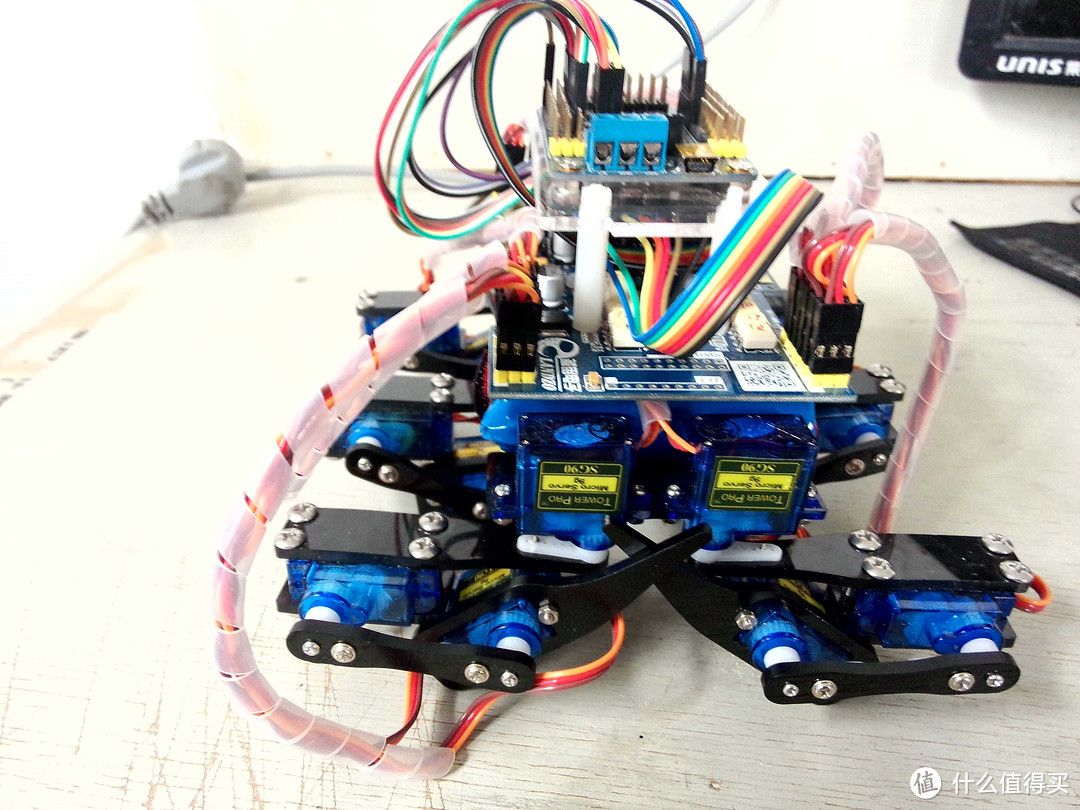
主体动力来源就是18个舵机~
然后安在了塑料的机身上
当然
我原先看中的舵机是这样的
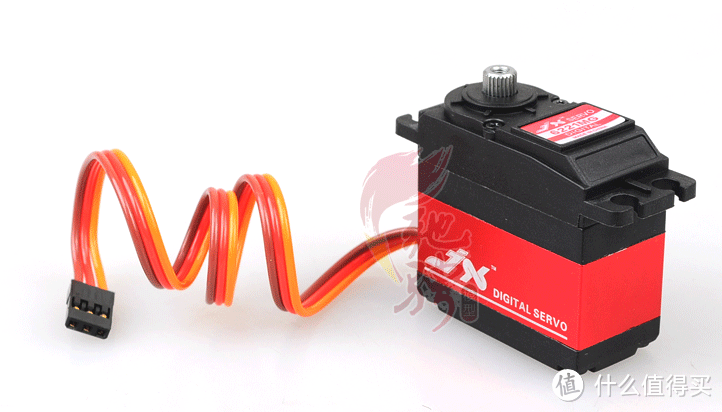
360度旋转,金属齿轮,大扭力,倍儿棒
然而一个舵机接近一张毛爷爷,一只螃蟹腿啊不一条腿上3个舵机,买下了够我小半个月喝西北风了然而它一共需要6条腿(废话,不然怎么叫六足机器人)一共18个。。。。
机身是想这样的

铝合金机身,帅气又有型
然而贵不说(其实还好。。。一条腿的价格)还要搭配前面巨贵的舵机。。。。。只好放弃。。。
来看看乞丐版的零件
虽然透明蓝色的外壳看起来很不错

但是这玩意儿叫9g舵机,几乎是最便宜的舵机了,瞧瞧它一身大塑料(我才不会说我玩废两个舵机了呢,都是塑料齿轮滑丝了。。。。),果然大塑料不管在那个领域都是受歧视的啊。。。。。然后只有可怜的180度角度
不过它便宜啊,单价十块一个,我的钱包表示轻松不少
然后机身
瞬间从精灵般的机身变成了矮矬穷的方块呆板样。。。还是塑料的。。。而且,这个机身结构设计有些问题,导致舵机受力过大,很容易坏。。。
不过穷学生,没办法
右边的手柄和旁白的黑色方块分别是遥控器和无线信号接收器
话说PS2手柄还真是万能啊~
最后,上面三块电路板,实际只用了左边最大的和右边最小的,中间那块本来是和左边那块搭配的,可惜这块飞思卡尔的frdm-k64f功能强大,我却不会用
所以买了一块ARM32的舵机控制板,32路PWM控制,控制18路舵机绰绰有余,搭配了上位机,设置动作组也很方便~
上位机的界面
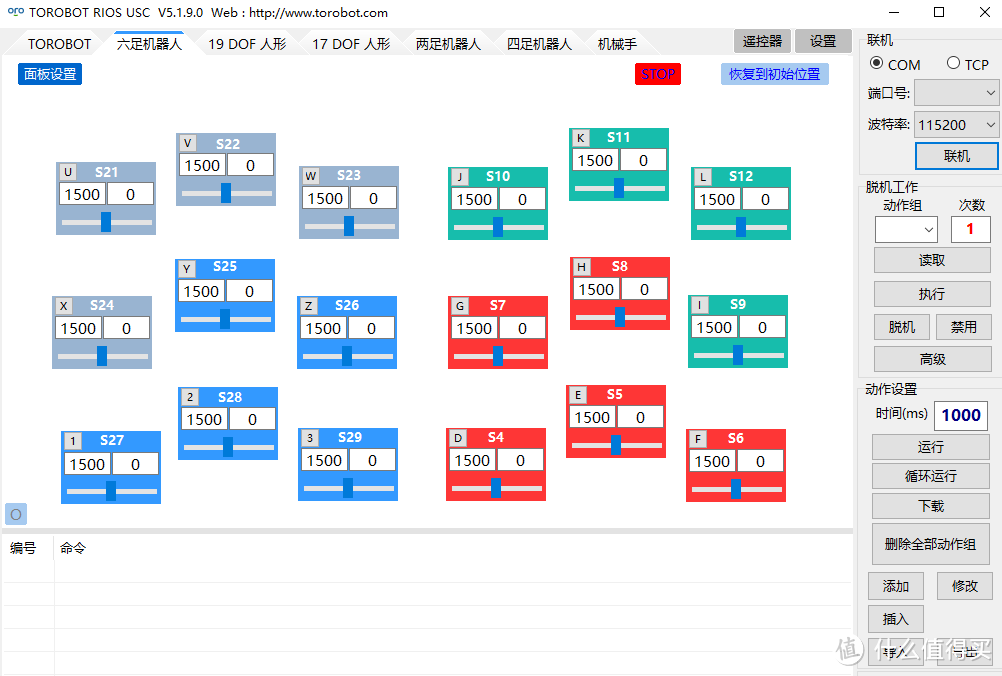
基本上连接上后,找好对应的舵机,然后调节滑竿就能控制舵机了,然后可以保存动作组啊什么的
至于那块大板子
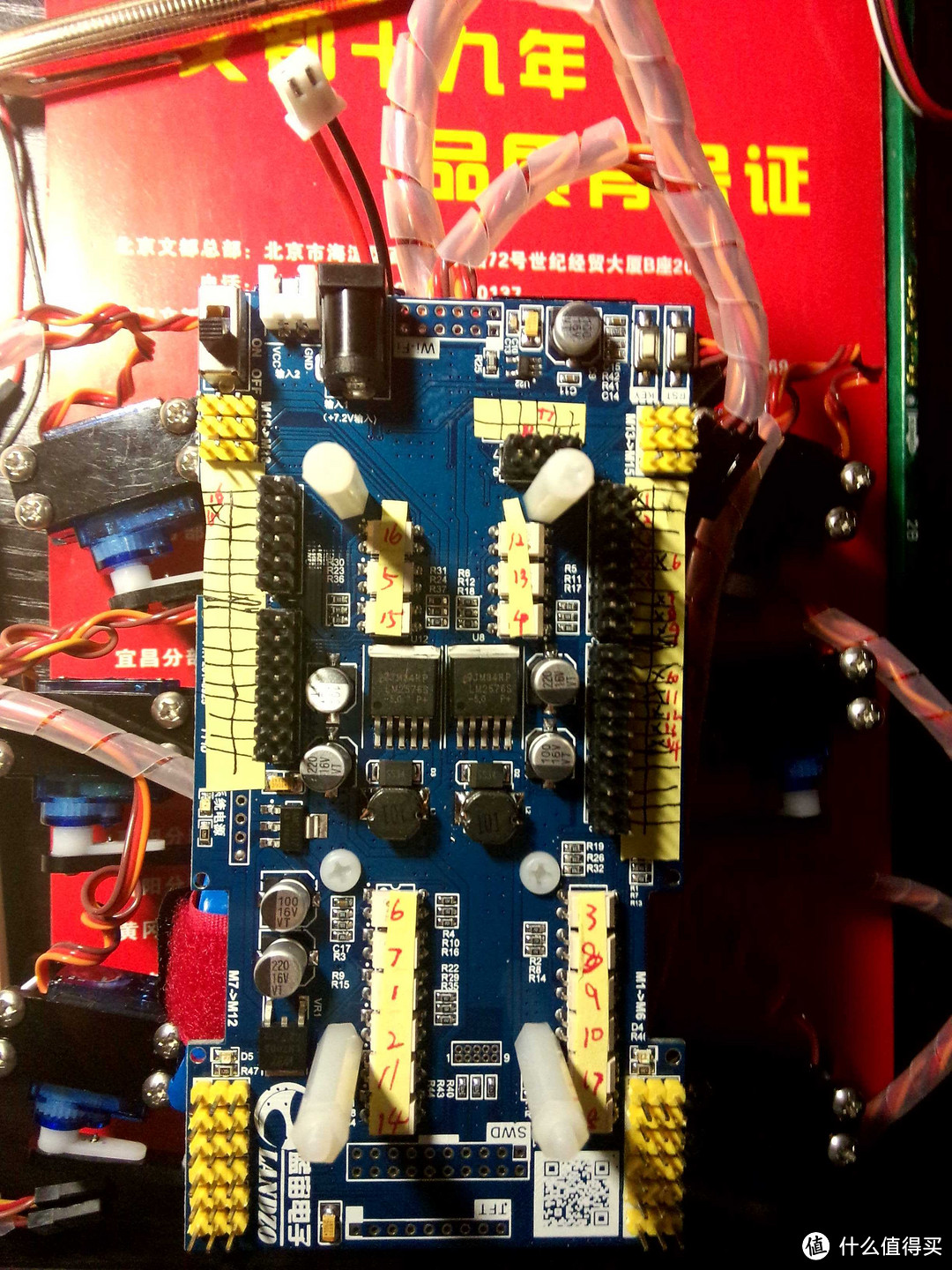
实际是用了供电还有传递信号的
由于只有一块锂电池(实际是两个锂电池连在一起)作为电源,而舵机,控制板需要分别供电,最坑爹的是舵机耗电巨大但电压一高还巨容易烧。。。而电池的电压在7-8V了,只好上了这块板子
然而舵机和控制板如同一对冤家。。。放在一起供电舵机永远无法好好工作。。。
而脆弱的舵机已经无法再支撑额外的电池了。。。
所以控制板只好外接电池供电 如此的不优雅。。。唉
如此的不优雅。。。唉
控制板
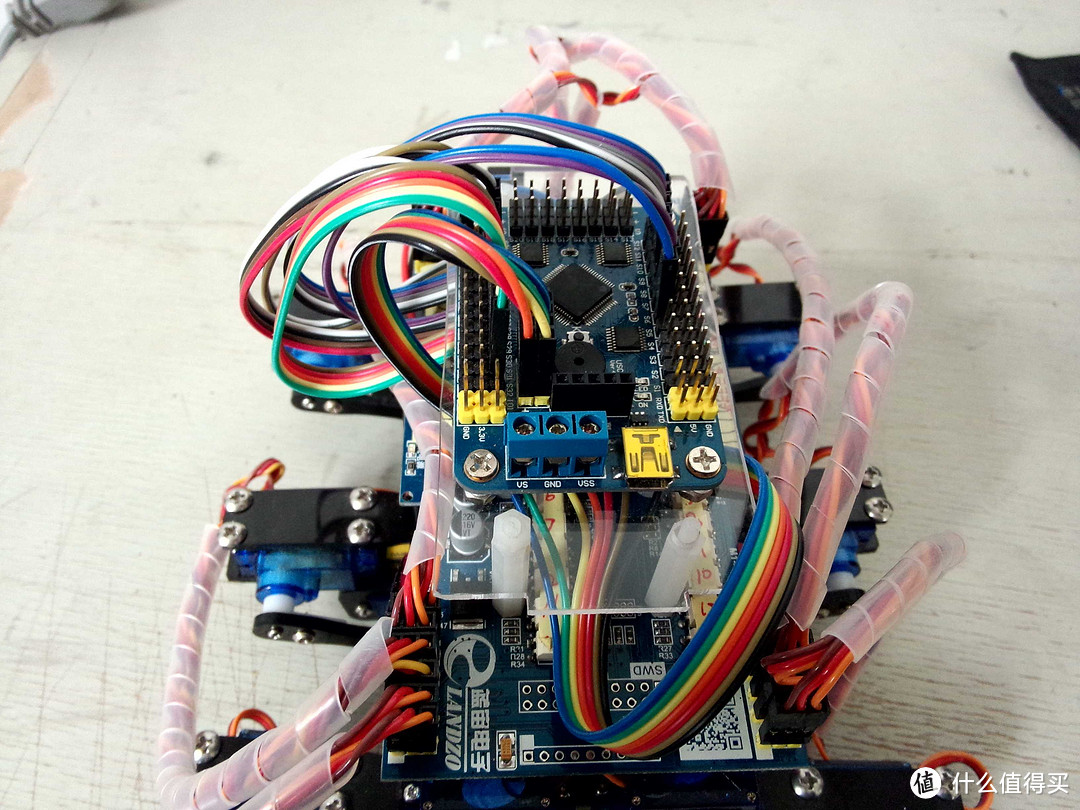
实际也是有舵机供电的,但必须5V。。。。高过必烧,低则不转。。。。呵呵
它的菊花。。。
话说我也不知道我为什么给它分正反
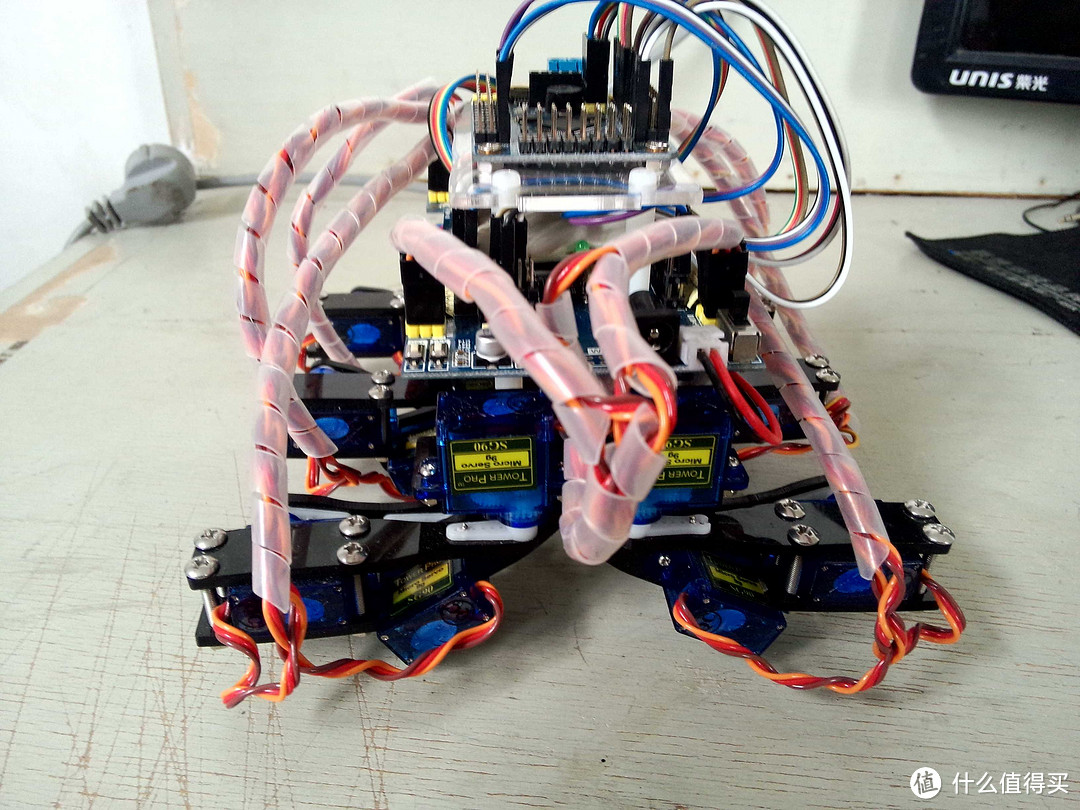
可能觉得这个隆起的线比较像它的嘴或者什么?
冥冥之中的 直觉 哈哈哈
侧面
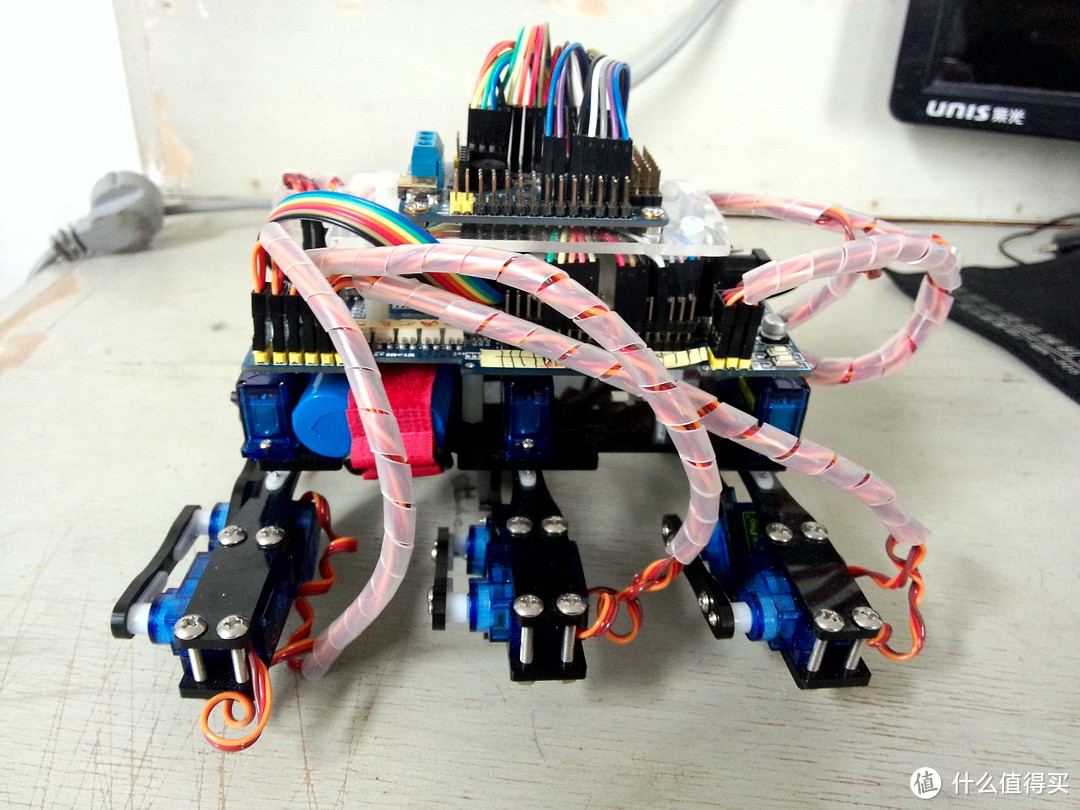
腿的特写
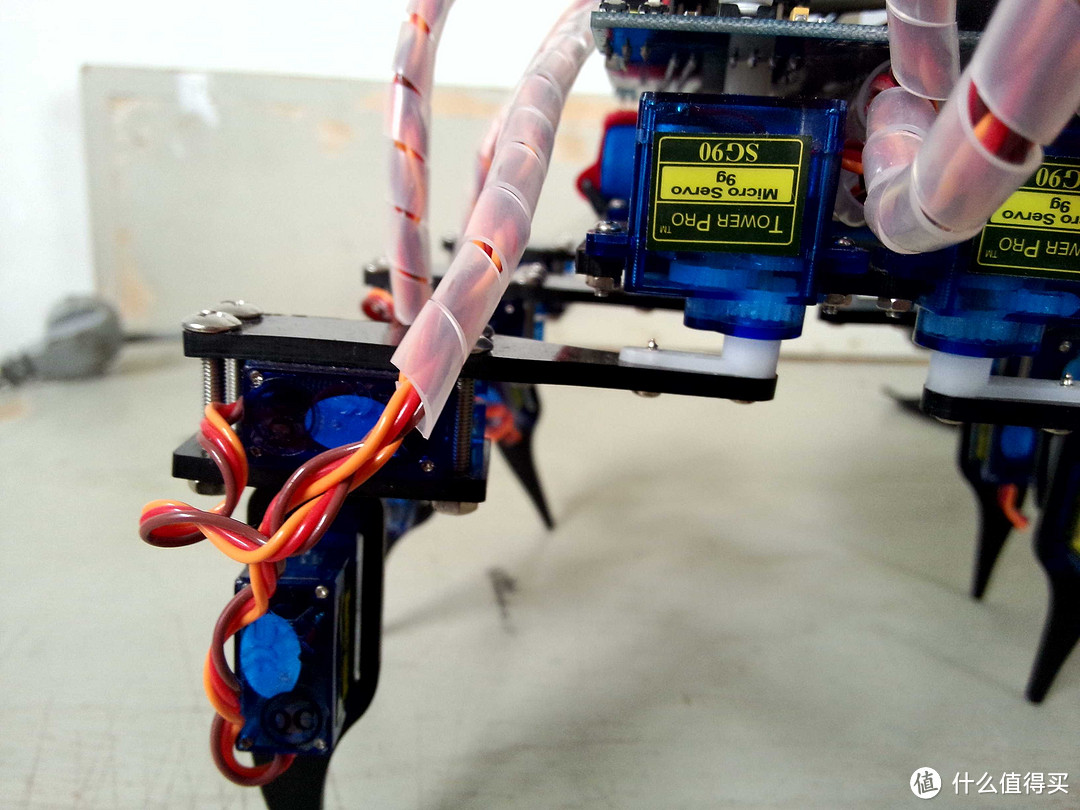
全机身(包括未出场的巨重无比的电池)就靠6个细细的塑料件支撑。。。唉,果然便宜没好货
这是它前进的视频
这个走的不算好,角度没算好,再加上它本身支撑能力不足,导致有时会倒
无意义的做广播操,呵呵
动作什么的还是很生硬,一个个调动作组很麻烦
再加上舵机质量不太行,角度什么的都不一样,更加大了调试的工作量
不过很好玩有木有!
控制板实际是可以和其他单片机通信的,然后就可以加一些其他的自主控制功能来摆脱遥控器的束缚,但是各个动作实际还是要事先保存的
至于更高端的,可以通过传感器和算法自适应步伐。。。
我只能说我还膜拜着这样的大神~~~
希望以后我能有所进步吧~~















nblizy
校验提示文案
神们自己
校验提示文案
梦中梦游
校验提示文案
kksasa感
校验提示文案
故事里的事
校验提示文案
城柳
校验提示文案
万法
校验提示文案
盼盼爸
校验提示文案
magicdog
校验提示文案
阿伟1
校验提示文案
UniJ_K
校验提示文案
New_Horizons
校验提示文案
无墨无痕
校验提示文案
kaysin
校验提示文案
yase000no1
校验提示文案
一顿三大碗
校验提示文案
盐巴
校验提示文案
我是光头
校验提示文案
blumeblume
校验提示文案
ydprtm
校验提示文案
值友2660916057
校验提示文案
我是光头
校验提示文案
Lunaleeguo
校验提示文案
花菜兔酱
校验提示文案
草木方仪
校验提示文案
汉武帝
校验提示文案
双雨座的天空
校验提示文案
盐巴
校验提示文案
gwyinan
校验提示文案
[已注销]
校验提示文案
一顿三大碗
校验提示文案
hehda
校验提示文案
车马红鱼
校验提示文案
yase000no1
校验提示文案
blumeblume
校验提示文案
在蓝天下
校验提示文案
zgpnhhy
校验提示文案
圈圈大叔
校验提示文案
Y_S都说名字长醒目
校验提示文案
kaysin
校验提示文案