























































17
41
#原创新人# 360 扫地机器人 开箱&简单使用
2018-01-18 17:00:20
18点赞
34收藏
130评论
追加修改(2018-01-20 09:14:29):
经过3天的深度使用,粗略总结一下。
1、吸尘还是可以吸的干净的,拖地的效果也令我满意。
2、尘盒体积太小,加上有一片塑料挡尘板(类似油烟机烟道的止逆阀),平时靠重力作用落下,防止拿出尘盒的时候灰尘跑出来。当吸尘器工作的时候就会被风打开贴住滤网,导致尘盒有1/3的体积是利用不上的。
3、乱撞!!感觉红外感应器、沿墙感应器没Luan用!!过障碍物基本靠撞 来描绘障碍物的形状,而不是结合感应器。有时候甚至90度撞向墙壁,退后3cm,再90度撞,连续3次,才慢慢转一个角度沿墙打扫。当家里的地图绘制完成后,如果在APP上画一个区域,这个区域面积比地图面积大,它依然会通过撞,而不是结合之前记录的地图、以及感应器感应,来完成该区域第一次外围一圈的打扫。举个例子,我有一个房间假设面积是5M*5M的,我在APP上画个6M*6M的区域,将整个房间包围住,然后让机器人前往打扫,它会像第一次来这个房间一样,靠撞击走一圈,确定好墙壁和柜子的位置后,再在这个确定后的区域内打扫。
4、路径规划问题。到指定地点,或者回充的时候,从房间空旷区域到门口(过道)等狭窄区域都是尽量选择直线走,但是你进门或者走过道能不能走中间一点啊?它偏不!导致每次进门之后,或者从过道出来客厅,它总是要撞几次拐角处的柜子。真是无语。
5、使用这货不能看着它干活,会让人发疯。以后使用还是得等到要出门再让它在家里自己去爱咋撞咋撞吧。我现在关心的是碰撞感应是否质量好?寿命可以撞几万次?几千次?
为了确认这货红外感应器是否有工作,晚上关灯,用带红外夜视功能的摄像头观察,发现机器前部确实有红外光,激光雷达也会在周围家具和墙壁上射出一圈测距点。
最后,感觉这就是一台普通的扫地机,用碰撞边线确定打扫区域+激光雷达绘图+APP可以画禁区、清扫区域+水箱拖地功能。和发布前的宣传词:告别盲撞,真的还差很远。目前我能做的就是期待后续固件版本升级,打扫的时候外出不看它,眼不见为净。
天猫首发前预购,16号开售,17号就由EMS送达了。新鲜出炉,赶紧上来和各位值友分享一下。
购买链接如下:

购买理由
搬家3个月,拖地3次,扫地<15次 ,感觉自己有够懒的。平时在家偶尔用静电扫把扫下地,感觉效果还不错。特别是家具的边角缝隙,扫地机无法达到的地方,静电扫把简直是神器。
,感觉自己有够懒的。平时在家偶尔用静电扫把扫下地,感觉效果还不错。特别是家具的边角缝隙,扫地机无法达到的地方,静电扫把简直是神器。
左边是网易严选的懒人扫把(够长,头部太松有时候不好控制方向);右边是花王的(长度适合女生,四个角夹纸紧,头部与杆没那么松松垮垮,扫地时候方向容易控制);中间是购于大创超市的静电无纺布。我也有在淘宝购买便宜的无纺布,效果其实还是有区别的。专用的静电纸吸尘会比较稳,扫到后期不容易掉落灰尘。杂牌的纸胜在便宜。另外还可以用湿纸巾安装在扫把上,小面积的擦地挺方便的。
 严选、花王静电拖把
严选、花王静电拖把
就算有扫地神器,但还是觉得自己需要一台扫地机器人。双11、双12小米扫地机的优惠都赶不上。突然间获悉360要发布扫地拖地一体机,而且首发才1399元,二话不说赶紧付了10元订金。
16日凌晨付款,物流信息等到16日深夜才显示,EMS配送,17号上午9点多就送到了。客服说这次的物流是天猫负责的,全国有多个仓库发货。看来360这次的供应链做的不错。
外观展示
送来的包裹只有一个纸箱,里面只是一台扫地机,说好的赠品并不包括在里面。(我也还没来得及去和客服咨询几时送来)
 双层纸箱包装
双层纸箱包装
 开箱正面内容
开箱正面内容
 所有配件
所有配件
 带喜感的除尘刷
带喜感的除尘刷
 保护碰撞感应的胶条
保护碰撞感应的胶条
 充电底座背部
充电底座背部
底座的设计可以让电线从两边任意一个方向出来
 扫地机底部
扫地机底部
左边的是拖布和水箱,水箱超薄的,拖地30平方就得加水了
 拿出尘盒
拿出尘盒
尘盒里面有3层滤网,普通塑料滤网、黑色的是海绵、最上面的是HEPA滤网。
 说明书
说明书
 很薄的水箱与拖布
很薄的水箱与拖布
 一大包静电纸
一大包静电纸
这是之前买的静电纸滤网(不要买我图片上这个牌子的,太厚)。家里的空调,我也在滤网上面加了3/4面积的静电滤网,方便后期清理。
") 加了静电纸(无纺布)
加了静电纸(无纺布)
加了静电滤纸(其实就是无纺布)
容易清理") 加了静电纸(无纺布)容易清理
加了静电纸(无纺布)容易清理
话说这个尘盒的体积有点小,不知道小米的是否会大一点。
 拖地之后的拖布
拖地之后的拖布
下次拖地打算在上面放一片湿纸巾,估计就不用洗的那么麻烦了。
使用感受
开机和更改指令的时候会有可爱的语音提示,感觉像个可爱的小助手。WiFi链接耗费了一段时间,最后没办法把机器抱到路由器旁边才绑定成功。路径规划比较合理,重复路线较少。但是第一次使用的时候,(我充电器放在主卧)主卧扫了一半那就杀去客厅了
可以在手机上设置禁止区域非常方便,但是我也希望支持一下实体虚拟墙。比如在沙发后面,扫地机进的去,但是出来的时候雷达就被卡住了,在沙发底下出不来了。为此还拯救过它2次。在手机上设置禁止区域,又没办法非常精准的定位到沙发的位置。另外当它被卡住太久,找不着北的时候,画好的地图数据就会消失,扫地机会重新开始构图。
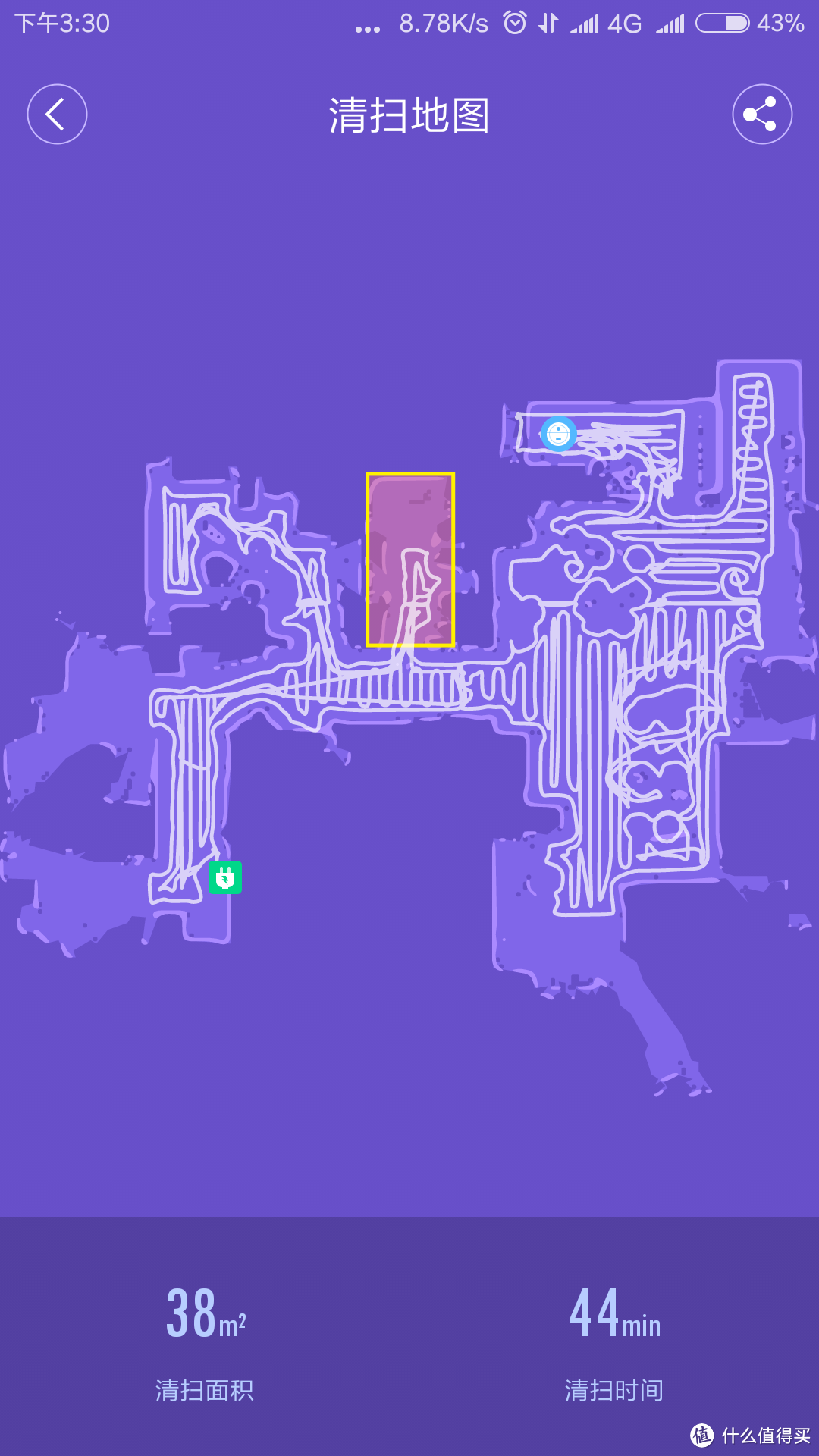
下图我红色区域就是地板潮湿的洗手间,设置之后扫地机就不会进入这个区域弄湿自己啦。左下角绿色的那是充电座(放在主卧),第一次开机它就无视我的主卧左边的面积和洗手间,在床尾走了几圈之后就跑出去别的房间打扫了。
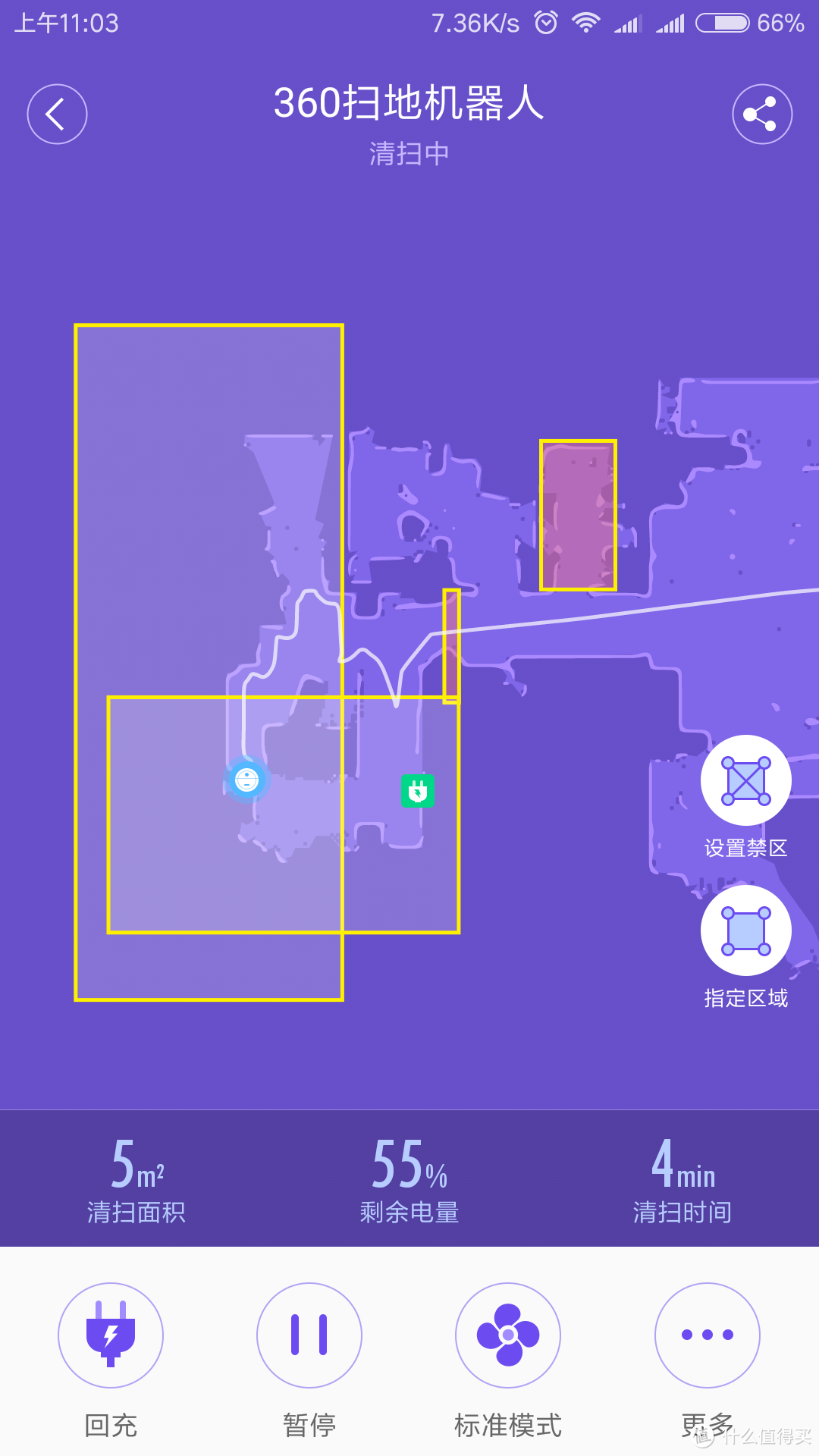
下图是后续一次打扫,我画了2个黄色的指定区域(主卧和洗手间)让它从客厅走回来打扫,然后在主卧门口设置了禁止区域,这次它就乖乖的在指定区域干活啦。后续实践证明,指定区域打扫完后它会回去充电,不会再到处跑,所以可以不用设置虚拟墙拦截它。
下图是手机app上的耗材&维护提醒界面。

最后放一张洗碗机和扫地机的合影,这两样电器买了绝对值。
 与洗碗机合影
与洗碗机合影
总结
优点:性价比高;扫地拖地效果满意;APP使用方便,可以指定、禁止打扫区域;
缺点:尘盒、水箱体积小;偶尔会带着洗手间门口的脚垫跑开1-2米;遇到厨房、洗手间这种门槛石有高度差、并且有脚垫的地方,就会进退两难,卡住一段时间,虽然最后都可以顺利逃脱。但是感觉没有官方说的越障2cm那么厉害。

















值友3770454026
校验提示文案
方诗雨爸爸
1、吸尘还是可以吸的干净的,拖地的效果也令我满意。
2、尘盒体积太小,加上有一片塑料挡尘板(类似油烟机烟道的止逆阀),平时靠重力作用落下,防止拿出尘盒的时候灰尘跑出来。当吸尘器工作的时候就会被风打开贴住滤网,导致尘盒有1/3的体积是利用不上的。
3、乱撞!!感觉红外感应器、沿墙感应器没Luan用。过障碍物基本靠撞 来描绘障碍物的形状,而不是结合感应器。有时候甚至90度撞向墙壁,退后3cm,再90度撞,连续3次,才慢慢转一个角度沿墙打扫。当家里的地图绘制完成后,如果在APP上画一个区域,这个区域面积比地图面积大,它依然会通过撞,而不是结合之前记录的地图、以及感应器感应,来完成该区域第一次外围一圈的打扫。举个例子,我有一个房间假设面积是5M*5M的,我在APP上画个6M*6M的区域,将整个房间包围住,然后让机器人前往打扫,它会像第一次来这个房间一样,靠撞击走一圈,确定好墙壁和柜子的位置后,再在这个确定后的区域内打扫。
校验提示文案
浮云9830
校验提示文案
evil114
校验提示文案
xslwin
校验提示文案
阳不二HOPE
校验提示文案
啥的意思啊
校验提示文案
wichtig
校验提示文案
胖子自然醒
校验提示文案
首席拔草官
🤔看完360的黑历史,居然还有人买360的东西,不怕直播?
校验提示文案
Lmy8362
校验提示文案
值友3770454026
校验提示文案
i谷爷
校验提示文案
值友3770454026
校验提示文案
希雨伤
校验提示文案
胖子怎么了啊
校验提示文案
古城闲人
校验提示文案
地方語言
校验提示文案
hsuehsong
校验提示文案
赞美猴小猴
校验提示文案
值友3770454026
校验提示文案
值友3770454026
校验提示文案
Lmy8362
校验提示文案
值友3770454026
校验提示文案
方诗雨爸爸
1、吸尘还是可以吸的干净的,拖地的效果也令我满意。
2、尘盒体积太小,加上有一片塑料挡尘板(类似油烟机烟道的止逆阀),平时靠重力作用落下,防止拿出尘盒的时候灰尘跑出来。当吸尘器工作的时候就会被风打开贴住滤网,导致尘盒有1/3的体积是利用不上的。
3、乱撞!!感觉红外感应器、沿墙感应器没Luan用。过障碍物基本靠撞 来描绘障碍物的形状,而不是结合感应器。有时候甚至90度撞向墙壁,退后3cm,再90度撞,连续3次,才慢慢转一个角度沿墙打扫。当家里的地图绘制完成后,如果在APP上画一个区域,这个区域面积比地图面积大,它依然会通过撞,而不是结合之前记录的地图、以及感应器感应,来完成该区域第一次外围一圈的打扫。举个例子,我有一个房间假设面积是5M*5M的,我在APP上画个6M*6M的区域,将整个房间包围住,然后让机器人前往打扫,它会像第一次来这个房间一样,靠撞击走一圈,确定好墙壁和柜子的位置后,再在这个确定后的区域内打扫。
校验提示文案
helloleezd
校验提示文案
值友3770454026
校验提示文案
阳不二HOPE
校验提示文案
榕哒
校验提示文案
首席拔草官
🤔看完360的黑历史,居然还有人买360的东西,不怕直播?
校验提示文案
xslwin
校验提示文案
加油杨杨
校验提示文案
胖子自然醒
校验提示文案
值友7067350791
校验提示文案
zhoudy
校验提示文案
下一站的自己
校验提示文案
星八克
校验提示文案
i谷爷
校验提示文案
evil114
校验提示文案
值友4994664894
最要命的是,沿墙或者柜子清扫基本靠机器撞出来…
路径线路图放大一看乱的要死。
我在考虑要不要退掉。唯一比小米好的地方在于不需要虚拟墙就可以设置禁区。
校验提示文案