












































158
30
龙年大年初一改造有陪Catta猫塔
2024-02-12 23:10:14
0点赞
4收藏
3评论
龙年除夕夜,春节联欢晚会的歌舞里,家里的自动猫砂盆坏了。
我家的自动猫猫厕所是有陪Catta,当初是市面上能找到的同类产品中最便宜的。可惜,也就二年吧,厕所还没淘汰有陪就倒闭了。此时,猫砂盆坏了,没地方返修。已经用惯了自动猫砂盆,现在让我回去手动铲屎,实在是受不了。况且,身为自动化专业IT身份的猫奴,岂能被这个难倒,于是决定自己改造猫砂盆让它重获新生,用我的单片机控制板替换掉倒闭公司有陪原配的控制板。
大年初一阳光明媚是个好天,二话不说,开拆:
 底座内的控制板, 主芯片是ESP32。板上的插座旁边有中文注释,可以方便地找到要截获的信号。
底座内的控制板, 主芯片是ESP32。板上的插座旁边有中文注释,可以方便地找到要截获的信号。拔掉所有的插头,拆下控制板是这样
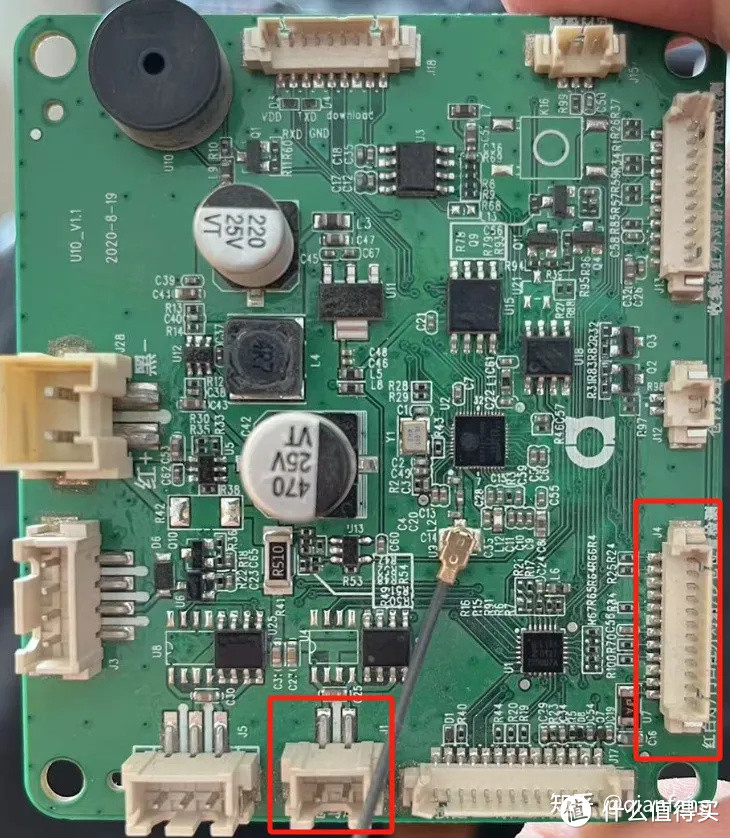 注意:控制板上所有的插头的pin数都不一样,复原时不会插错。
注意:控制板上所有的插头的pin数都不一样,复原时不会插错。上图中:J1是沙仓的驱动电机接口,J4是红白灯/门口红外对射/沙仓位置检测。此时我初步的想法是用自己的控制板接收沙仓位置检测信号并接管沙仓电机控制信号。偶拿放大镜看了半天,总是看清楚了J1旁边电机驱动芯片是LN8516:
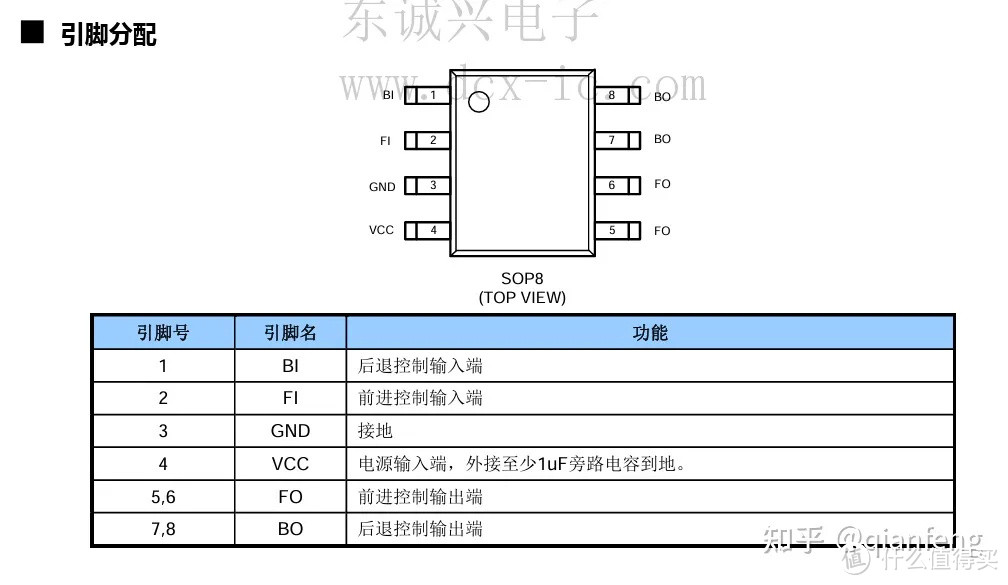
接下来就是施展焊接技术的时间,需要把电机驱动芯片的BI和FI脚从原配控制板上焊接下来,芯片的其他脚位保持不动。结果我搞成这样:
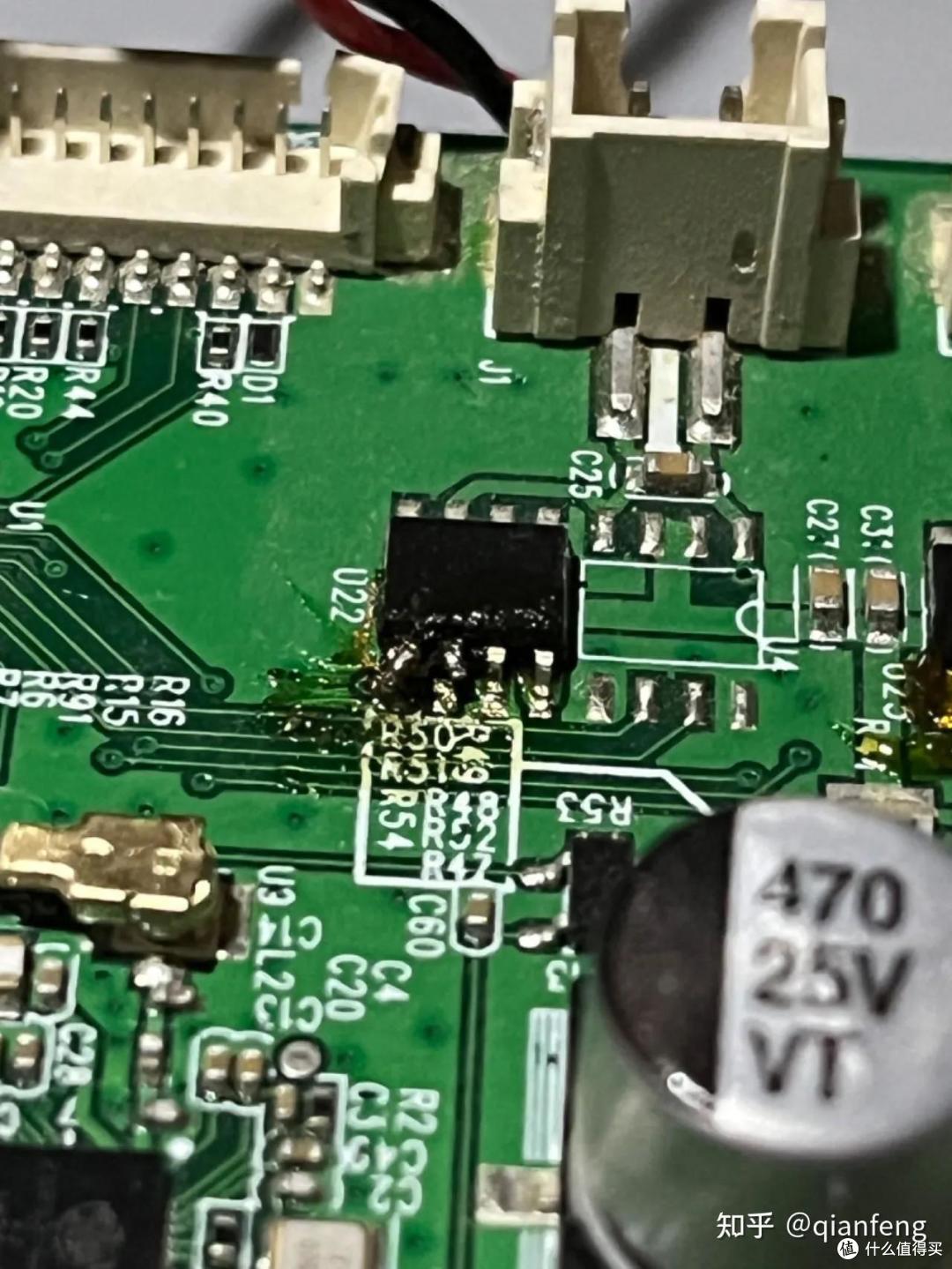 把电机驱动芯片的 BI FI1,2脚从控制板上断开
把电机驱动芯片的 BI FI1,2脚从控制板上断开自动猫砂盘电机下面有一个霍尔器件板,先要搞清楚其上的四根线是啥,才能接管沙仓位置检测信号:
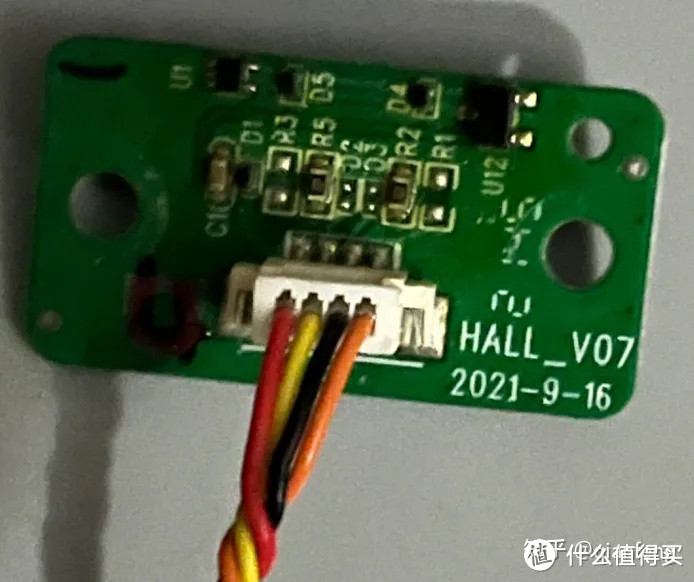
上电测量后得知:红色是3.3V供电,黄色是霍尔器件输出,平时输出是3.3V高电平。黑色是另一个霍尔器件输出,同样是输出高电平。橘黄色线是地。
在控制板J4处断开位置检测板过来的这四根线,利用原配控制板输出3.3v为我的控制板供电,我采用的是树莓派pico,可以用python编程,调试和下载,编写程序和调试非常方便。
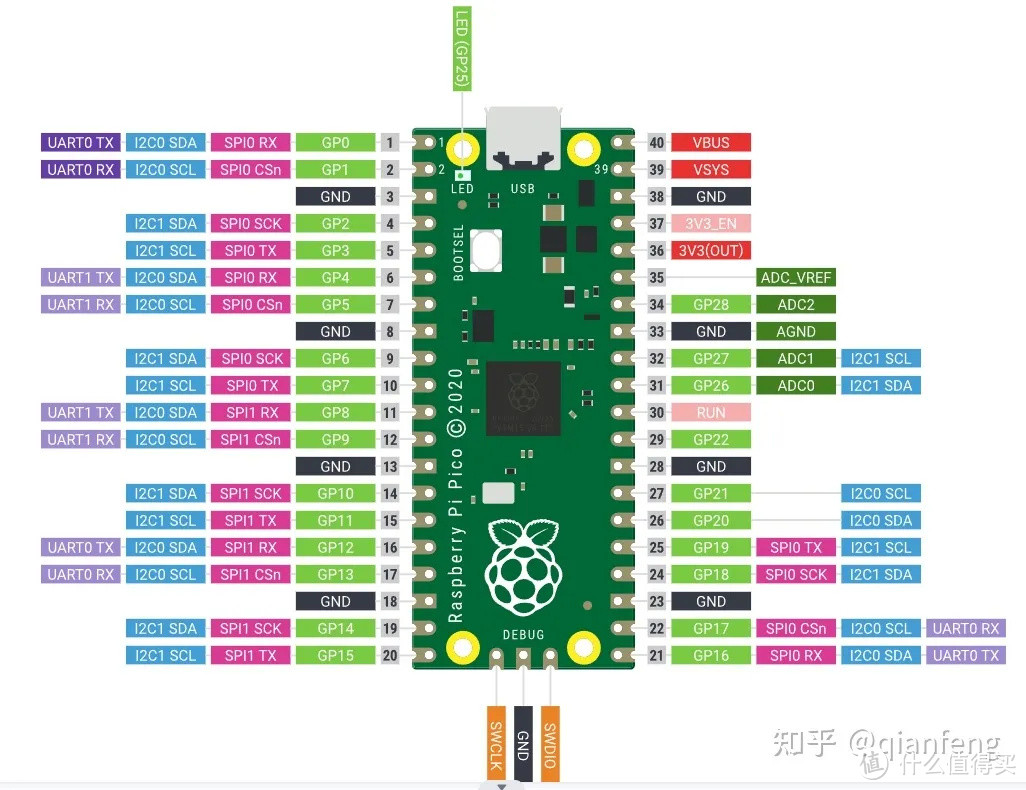
用位置检测模块的红线接pico的3v3(36pin),橘黄线接pico的任何一个GND,这里我接的是pico的38pin。断开位置检测模块的黄线和黑线,黄的焊接在pico的GPIO21,黑线焊接在pico的GPIO20。借用了一段沙仓位置检测模块上黑/黄线,将pico的GPIO16 和GPIO17接到电机驱动的FI和BI脚。最后将pico固定在原控制板旁边,把pico的usb线引出,Catta的硬件改造工作大功告成了。
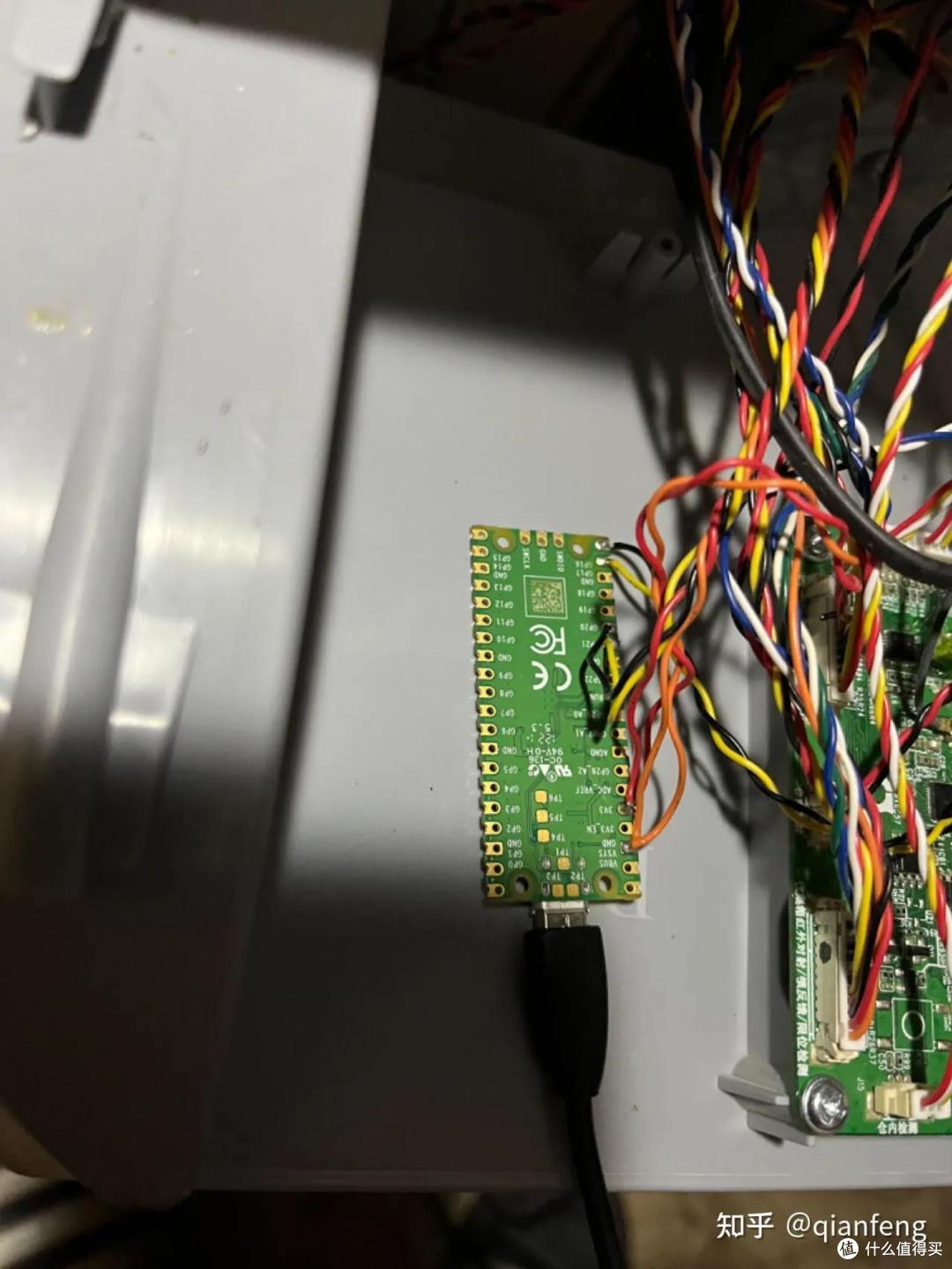 用电焊胶pico固定在控板旁边
用电焊胶pico固定在控板旁边隔天经过程序编写和调试,自动猫砂盘已经恢复了定期翻砂的基本功能。这次改的比较急,很多检测信号没有接管,等以后有空再搞把。需要控制程序的看官可以联系我哈。划重点——基本功能,不是全部哈!
作者声明本文无利益相关,欢迎值友理性交流,和谐讨论~
















贾斯丁卢本伟
校验提示文案
贾斯丁卢本伟
校验提示文案