
























































158
30
科沃斯T8 Power 一年使用体验问题汇总
2021-07-13 19:04:54
5点赞
4收藏
11评论
创作立场声明:我目前只长时间使用过科沃斯这款扫地机器人,与任何扫地机器人厂家无任何商业利益及接触。本文涉及的问题都是长时间使用积累下来的个人感受,并非实验结果,内容仅供参考。
大家好呀,我是佛系老司机。
之前详细评测过科沃斯t8 Power,优点非常多,比如精准导航、超强钻洞、洗擦一体、省电静音等等。

今天重点聊聊长时间使用后我发现的一些深层的问题,其他家产品可能也有类似的情况。由于户型不同,这些问题并非人人会遇到,但也许会对产品的改进有一点点帮助,所以我觉得还是有必要聊聊我的“遭遇”。
问题一:创建地图与清扫混淆
按照厂家的逻辑,首次建图必须让机器自动完成全屋清扫一次并回到充电座,才能生成完整地图,也就是“边扫边建图”,就像你开车用导航,一开始是没有地图的,得开一段地图才显示一块,比如这一幕:
- 志玲!志玲!
- hi,人家等你很久了。
- 前面是哪里?我怎么什么都看不见?
- 哥哥你大胆地往前走就好了。
-
关键是,很多厂家都是这个思路!
这么搞,房间少面积小也就罢了。房间多的话,不说要等待很久(我家100平大约1小时)才能完成建图。而且,建图时肯定是无地图的,复杂户型容易出现漏扫,漏扫就等于建图不完整,且无法在已有地图上进行补建更新,只能删掉重建。
 首次建图清扫效率低,完整建图耗时过多。
首次建图清扫效率低,完整建图耗时过多。
有一次机器很久没充电,结果我在开箱评测时辛辛苦苦精心调整的地图居然丢失了。客服说地图默认存在机器上,电池耗干无法找回,如果怕地图丢失,必须开启“多楼层”功能然后重建——这弯子绕得也太大了吧?
我认为,正确的逻辑应该是将建图流程单独拆分,先让机器去各个房间走一圈,不要清扫。待用户确认地图无误后,进行地图调整,比如合并或拆分区域,形成更为精准的户型图后,最后实现云端自动同步。
对于户型相对复杂的用户来说,地图能否快速方便地创建、同步,是非常重要的!
对于小户型或结构简单的户型来说,其实没必要买这种带导航功能的机器,因为小户型建不建图对效率的影响并不是很明显。
有一说一,只要地图完整建好,科沃斯的地图设置功能还是非常方便和直观的。
问题二:动态避障逻辑不足
避障功能是T8 Power的一大优势,很小的障碍都能准确地绕开。但有时候,地上被它绕开的障碍物被拿开了,它虽然能检测到障碍物的消失,但也没有回去补扫。
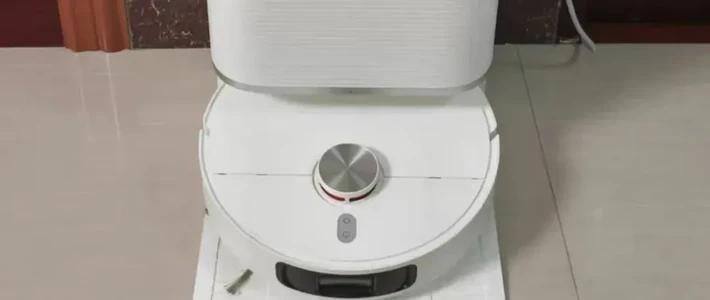
我家客厅与卧室之间有一个不高不低的小门槛(见下图),机器经常会卡在这里“不上不下”,所以在首次创建地图前我在这道槛上设置一排障碍,防止它还没扫完里屋就串到客厅——这也是为什么我对地图如此重视。可是,当我希望它去客厅并撤掉一排障碍后,即便APP上显示已无障碍,机器仍然不往客厅里,扫完里屋就结束清扫回去充电了。
 我家客厅大理石与里屋木地板形成的小台阶
我家客厅大理石与里屋木地板形成的小台阶
这个问题,APP中其实已经有明显提示:快速建图时,不能有障碍,不能搬动机器人,把所有房门打开。如果你能做到,当然不会有我的这个问题。
可是我……
问题三:攀爬能力发挥受限
我家这个不高不低1.7cm的小台阶,给它的通行带来了很大的麻烦,大部分情况都是卡在这里折腾半天,最后还是需要“人工助推”。但其实有几次是异常顺利就能一次性如履平地般地通过的!说明它是具备不错的攀爬能力的。
 之前评测时一次爬上的几率很低,这种爬几下能通过的已经算很好了。动图加速播放
之前评测时一次爬上的几率很低,这种爬几下能通过的已经算很好了。动图加速播放
针对这种圆滑边缘的台阶,其实果断直行不减速就能冲上去,但系统往往会把台阶识别为障碍,来个急刹,重新攀爬的时候角度又找不准,要尝试多次才能爬上去,具体次数看运气。而且最近更新固件后我发现,下台阶的胆子还变小了——总在边缘处犹豫不敢下来,感觉像是防跌落保护更敏感了。
还有几次,它凭借锲而不舍的精神,终于自己爬上台阶了,我刚要鼓掌叫好,它转个圈又下来了,继续锲而不舍地爬……是觉得刚才的姿势不够帅要重新来过吗?
我知道人类看似简单的思维逻辑,AI实现会异常复杂,但这才是开发人员存在的价值。明明可以爬上的小台阶,简单的场景,一年多了,也更新过固件了,依旧不是很顺畅,反而感觉不如以前了。
总结
如果爬台阶、下台阶能更果断一些,我就不需要在门槛设置障碍;如果它能及时识别障碍已解除,我就不会因为建图不完整而重新建图;如果建图流程快速方便,我也不介意建图不完整后多来几次。
虽然我也可以像第一次使用时实现完整建图,但花费的时间精力可真不少。
我知道,开发人员肯定比我聪明,这些设计自有其道理。我也承认,T8 Power已经是非常不错的机器。但从用户的角度来说,我只是希望这款产品越来越聪明。
希望以上问题,尤其是“建图慢”的这个行业难题,率先由科沃斯攻克。
我是「佛系老司机」,原汽车行业从业者。对用车、摄影、家居数码感兴趣的朋友,欢迎关注我哦!


















word胸肌大么
校验提示文案
值友大亮子
校验提示文案
粢饭油条
校验提示文案
粢饭油条
校验提示文案
粢饭油条
校验提示文案
粢饭油条
校验提示文案
值友大亮子
校验提示文案
word胸肌大么
校验提示文案