












































26
28
小白用户小圆车初体验 KittenBot迷你巡线小车(豪华版)
2018-02-23 14:39:51
2点赞
2收藏
0评论
一,开箱
小白新手,因为工作的原因,对智能产品有很大的兴趣。感谢众测君给予这次众测机会,祝愿所有的值友们新年快乐!
商品外包装,简洁明了。
 满满当当,好多的扩展模块。
满满当当,好多的扩展模块。

主体和配件。

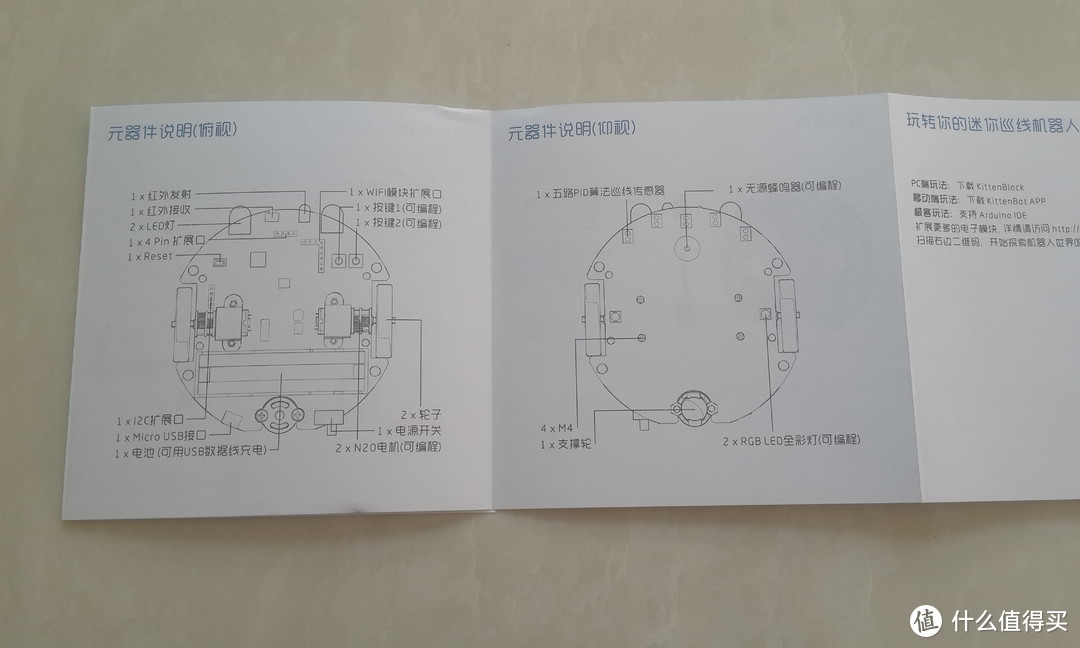
说明书,新手必读,一些基本认知。
巡线地图,使用时要压平,也可以用赠送的PVC绝缘胶布自己在光滑的地面或桌面上粘贴。

二,巡线
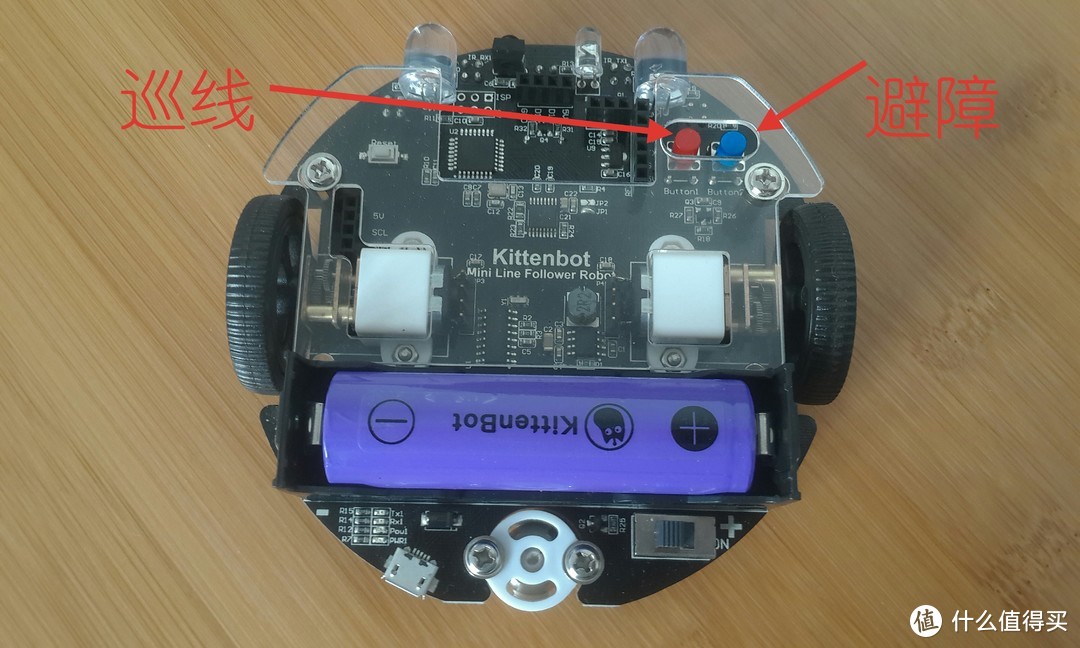
巡线没有复杂的设置和操作,上手就能玩。
首次运行先去掉电池挡片,打开开关,短长按红键,滴滴两声后开始自检,原地旋转。
自检停止后重新扶正小圆车,并按一下红键启动,小圆车就开始工作了(观看视频请先调低音量
)。
注意自己制作的地图,尽量不要粘贴出小于90°的锐角,否则小圆车急转弯会偏离轨迹,自动停车。巡线过程中,小圆车通过5路巡线传感器感应到的路线,经过PID运算后,不断快速修正运动轨迹。对于熟悉的线路, 运行会越来越流畅稳定。

PID控制分别对应的是比例、积分、微分,工业自动化电气设备中应用广泛,在高层楼房恒压变频供水中,变频器主要设置的也是PID参数,热工仪表中的自动温控,也是通过PID运算控制的。
三,一键避障
一键避障必须先安装Kittenblock图形化编程软件和驱动,进行恢复固件的操作。
在客服的指引下,加入“爱上KittenBot小喵科技”的QQ交流群,群文件或者论坛上可以免费下载Kittenblock图形化编程软件。
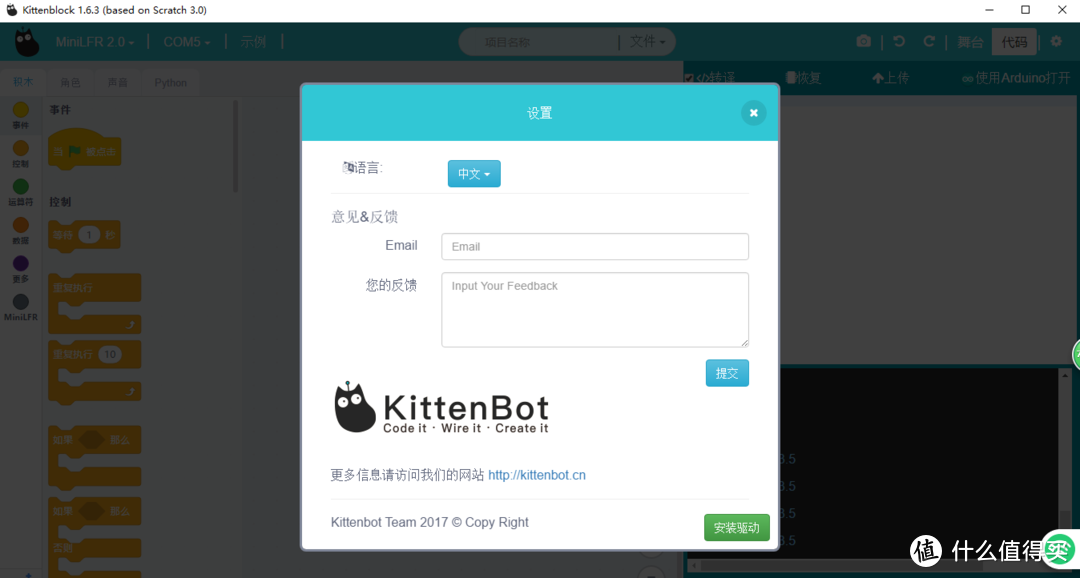
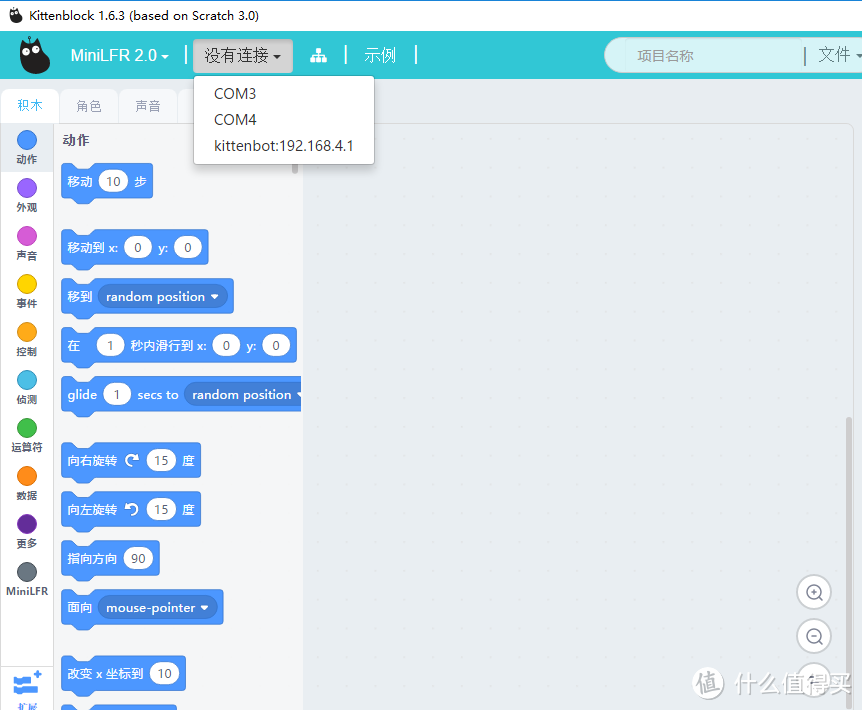
软件安装后操作界面,默认是英文的。

点击右上角设置,转换成中文操作界面。
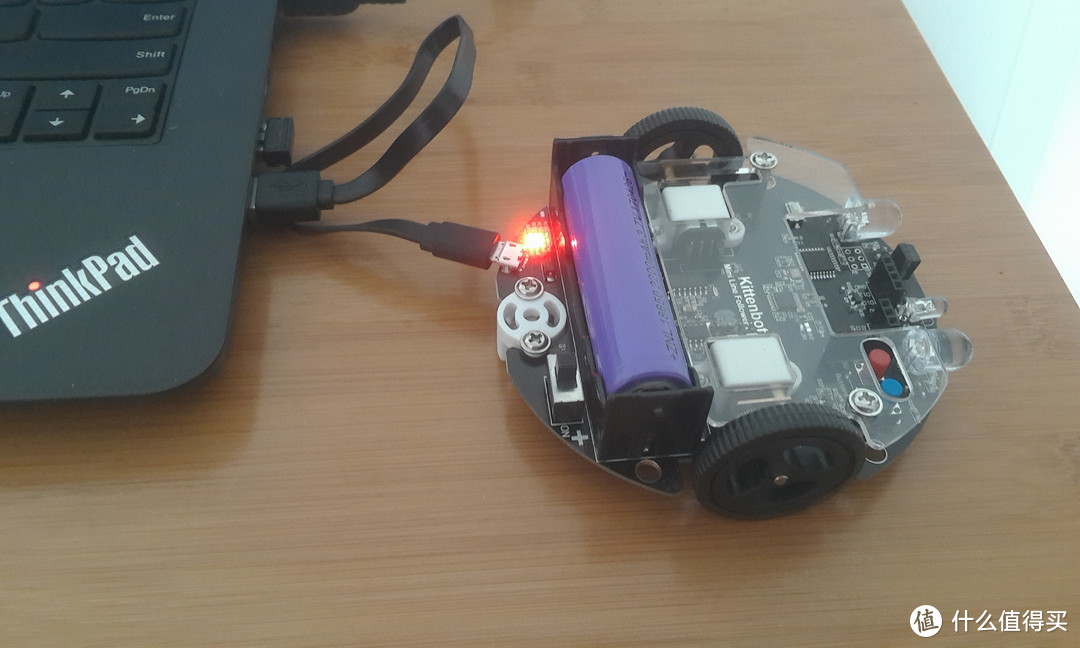
数据线连接小圆车。
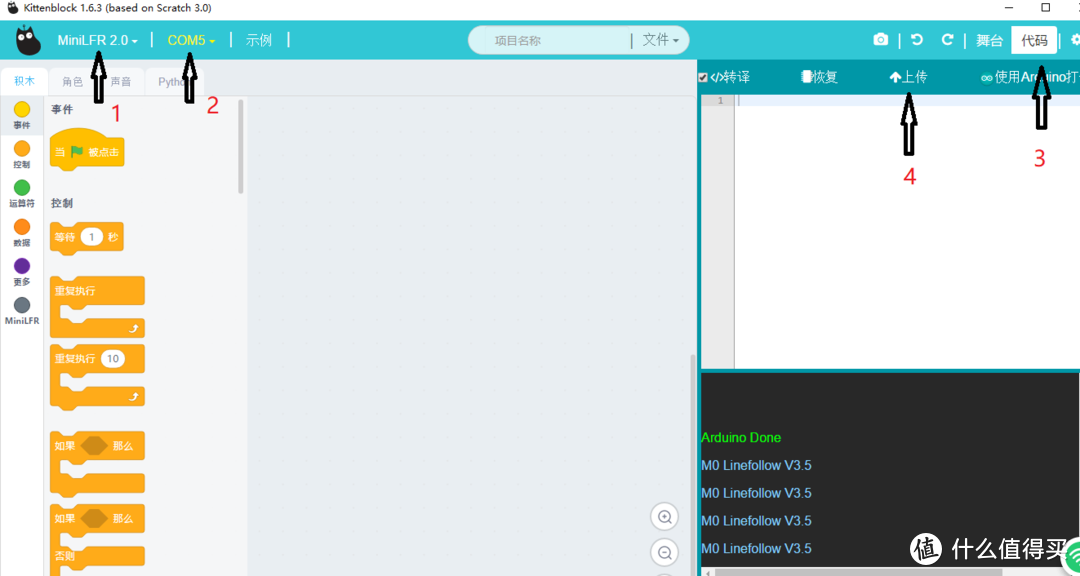
按照1,2,3,4步骤进行恢复固件的操作。1是选择设备版本号,2是选择电脑连接小圆车的串口号,如果多个串口上有设备连接,可以通过设备管理器查看判断小圆车所在串口号。或者暴力点,拔掉小圆车数据线,看哪个串口号消失了就是哪个,这样操作对设备不好,不建议。
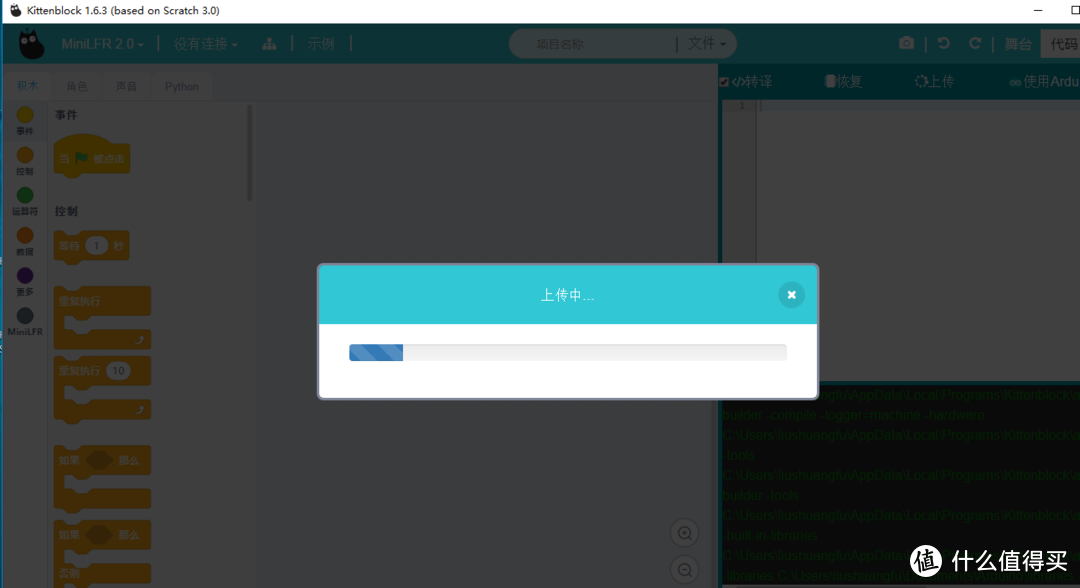
固件恢复中。
 固件恢复成功后,准备插上猫头超声波(注意所有扩展模块在安装拆卸时,尽量避免热插拔)。猫头四针上标明了“V”和“G”,分别对应电源的正负极。猫耳朵上的指示灯状态可以通过编程来控制,方法参考下文。
固件恢复成功后,准备插上猫头超声波(注意所有扩展模块在安装拆卸时,尽量避免热插拔)。猫头四针上标明了“V”和“G”,分别对应电源的正负极。猫耳朵上的指示灯状态可以通过编程来控制,方法参考下文。

小圆车前端的四针插座上也标有“5v”和“GND”,分别是电源的正负极,注意不能插反。
找墙角试一下,反应还可以,可是并没有店家玩的那么溜,入行太浅吧。超声波的感应距离是可以通过软件进行设置的。
四,编程体验
相对巡线和一键避障,编程操作稍微步骤多一点,但也并不是复杂的机器语言,更像是有趣的积木游戏,而且可以举一反三,触类旁通。
1,点亮车头灯。经过步骤1,2后,点亮车头灯。
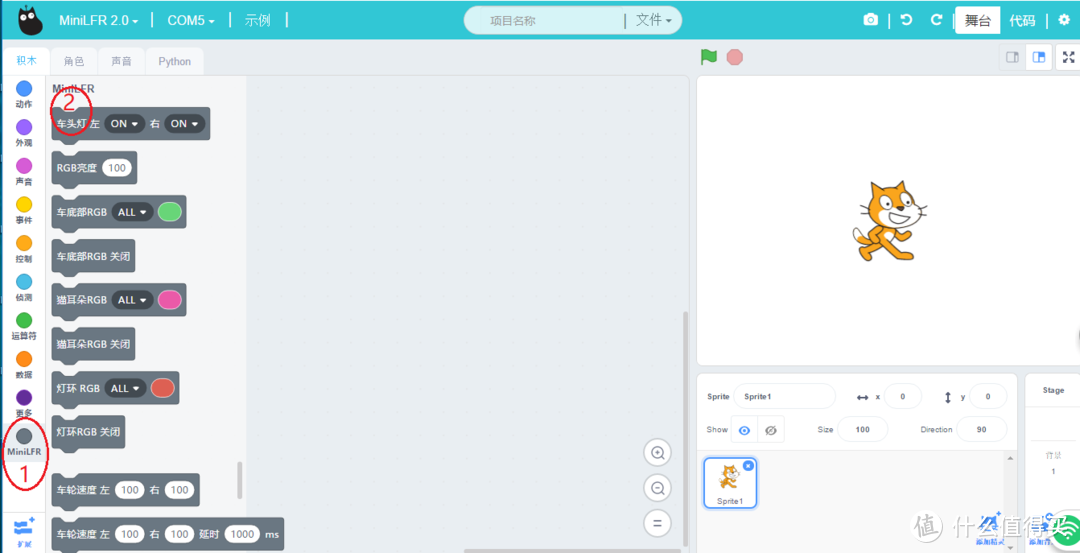
在线点亮,可以选择单个点亮,或全部点亮(同理,车轮空转和蜂鸣器也都可以在线试机)。

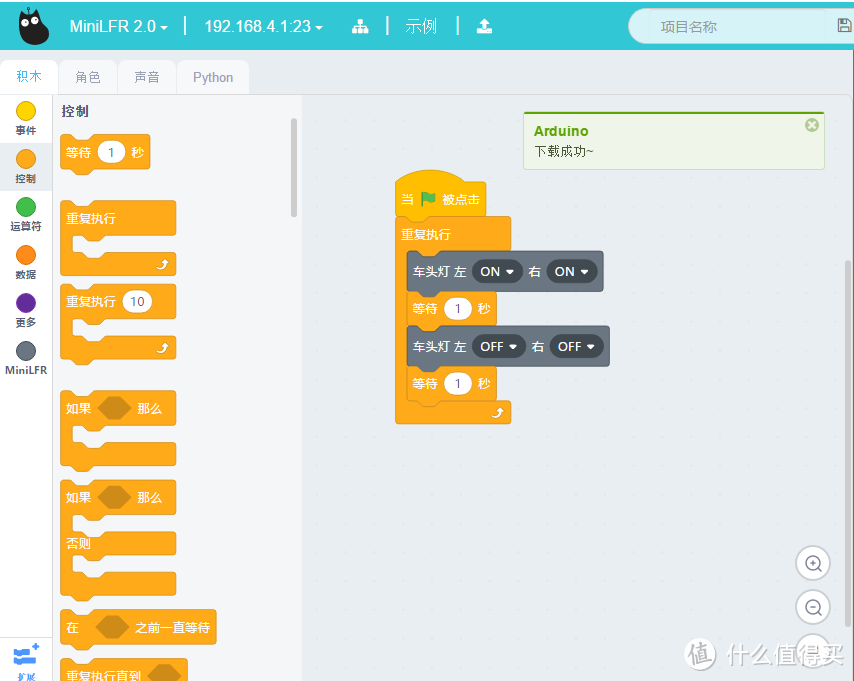
可以编一个车头灯一闪一闪的小程序,并上传到小圆车主板,使它离线状态下也能运行。注意编写任何程序,首先拖拽绿色旗帜模块,再拖拽其他需要的命令模块。
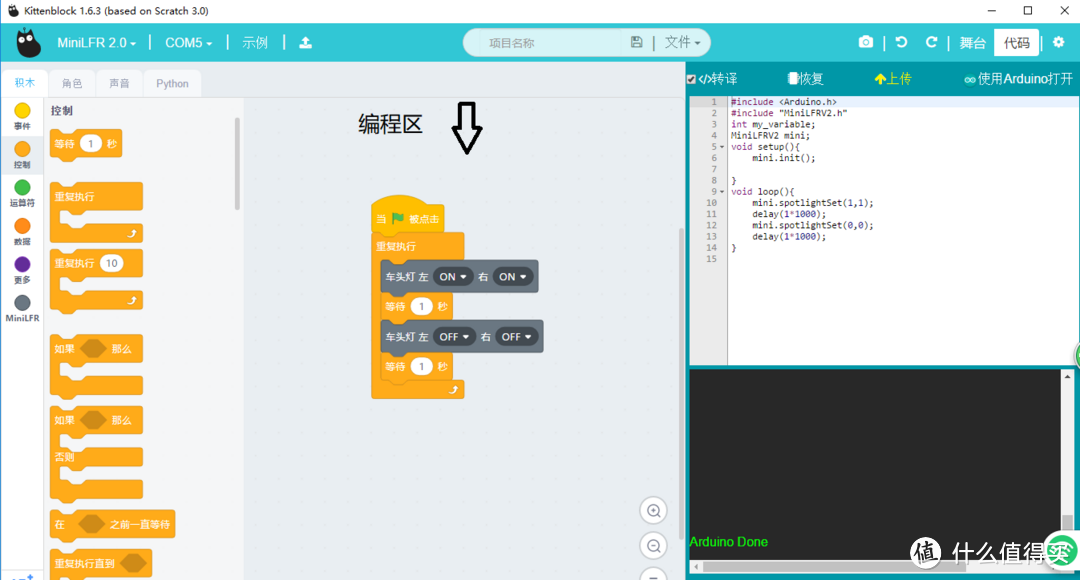
程序检查无误后,别忘点击上传,上传成功后,小圆车马上就执行程序了,把数据线取掉离线状态下也是这个效果。

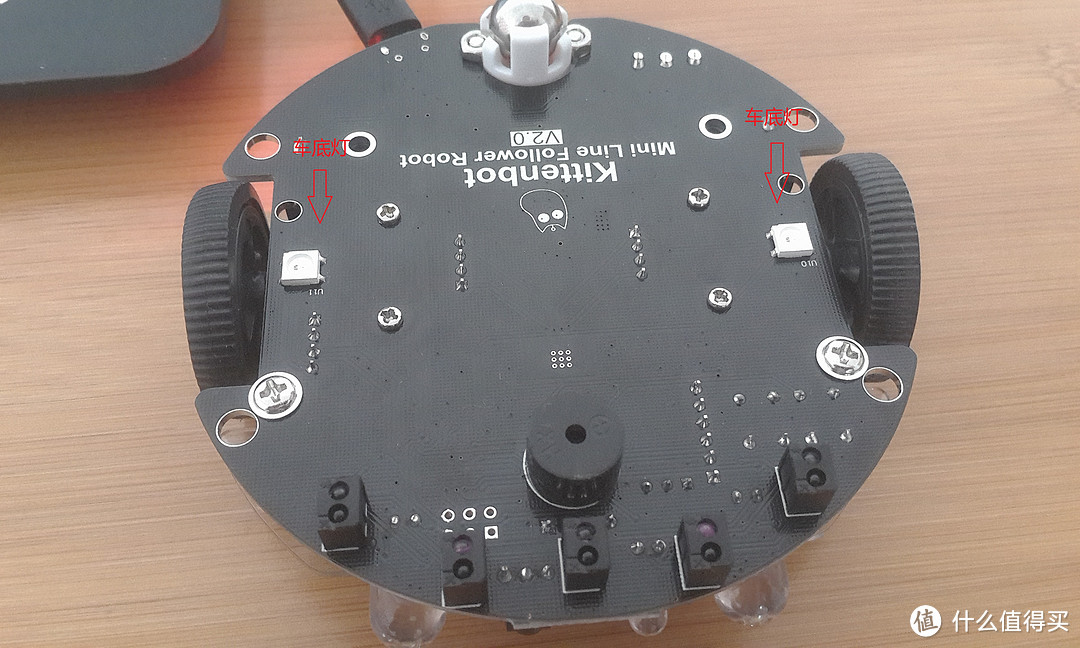
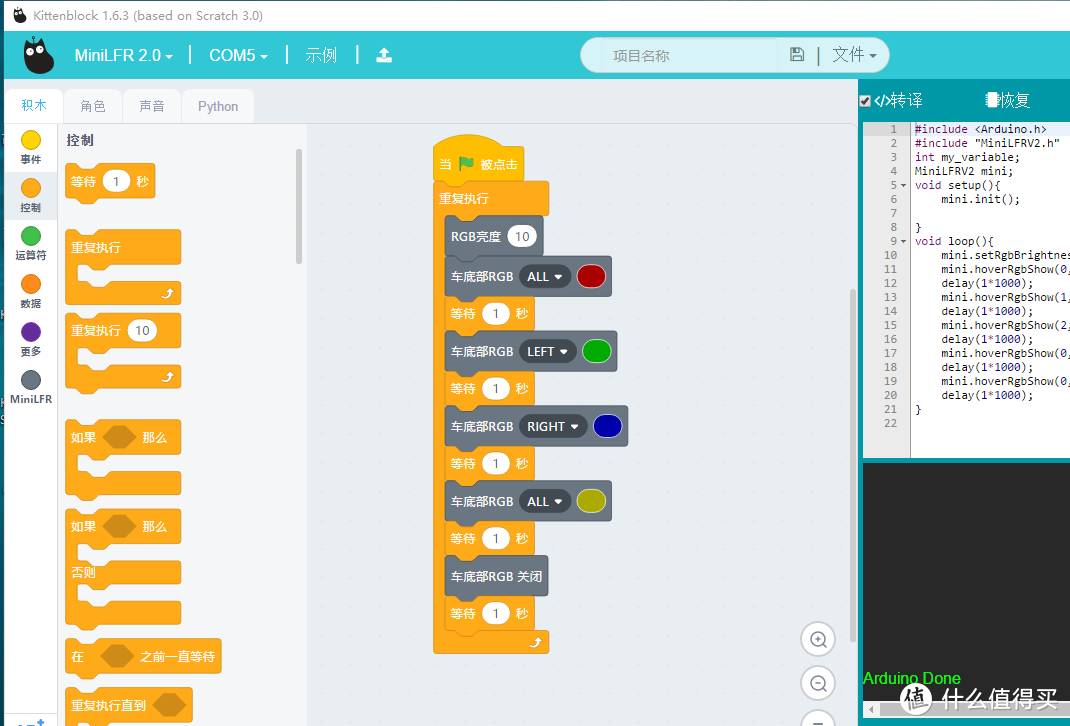
2,车底灯。车底灯是两个贴片LED,可调光调色,可玩性比车头灯高。
编程并上传写入,编程之前,上一个车头灯的程序已经被移除了,为了更直观,互不干扰。
实际效果。

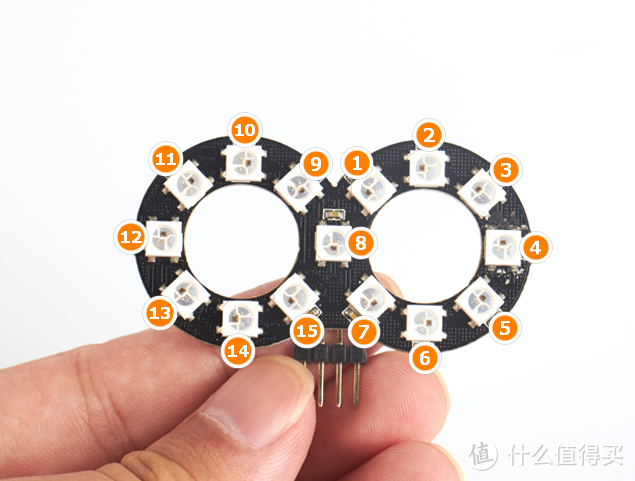
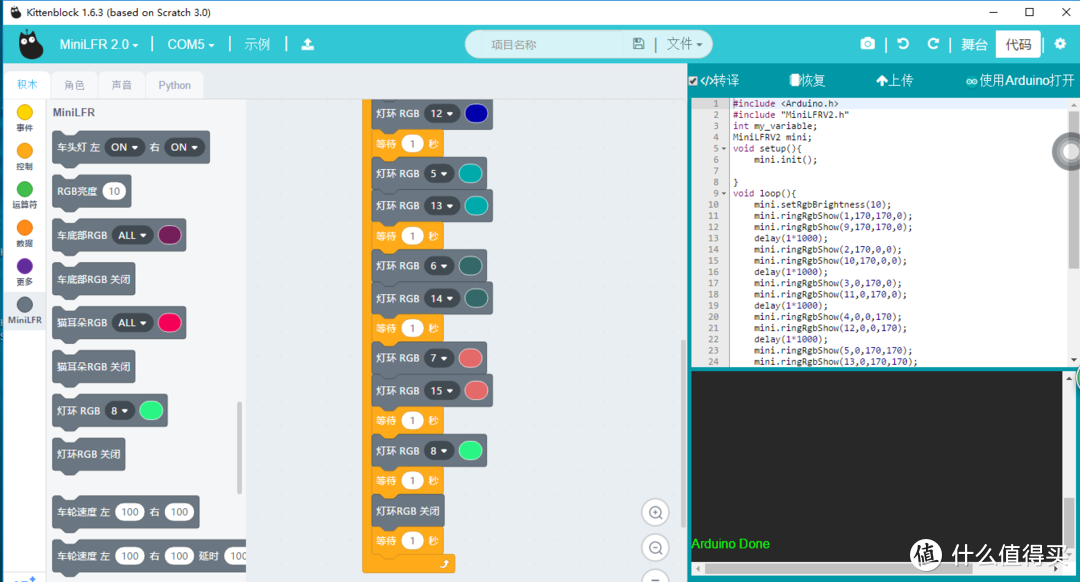
3,炫彩8字灯环,共有15颗灯珠,有固定编号(图片来自小喵科技论坛)。
8字灯程序,不同的人有不同的编程方法,不同方法不同精彩。
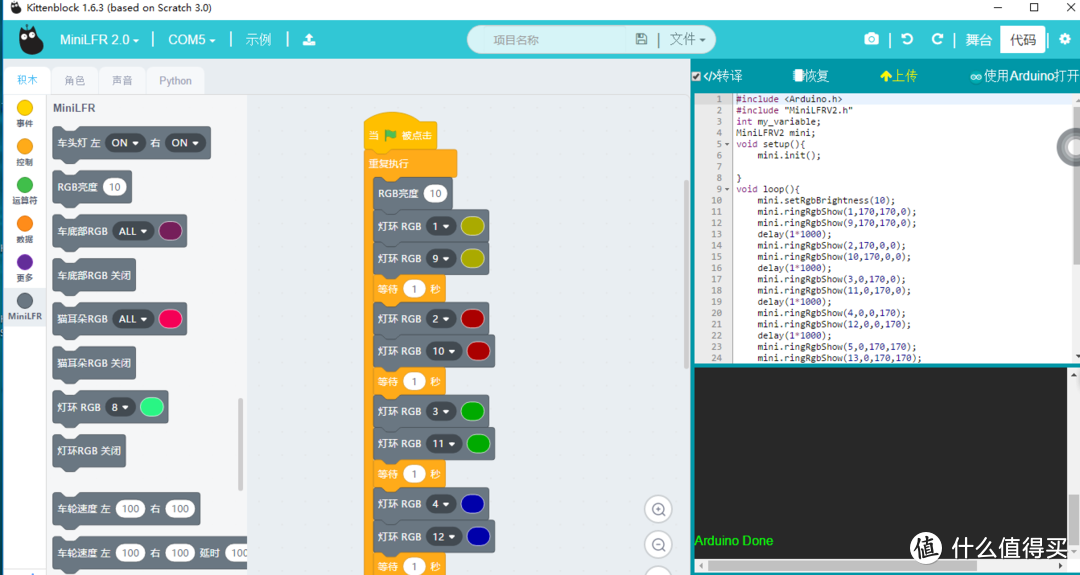
非常好看,可惜手机和自己的拍照水平有点渣。另外环灯工作的同时有一个车头灯被点亮,被我用黑胶带粘上了,不知道是操作的问题还是软件的bug。

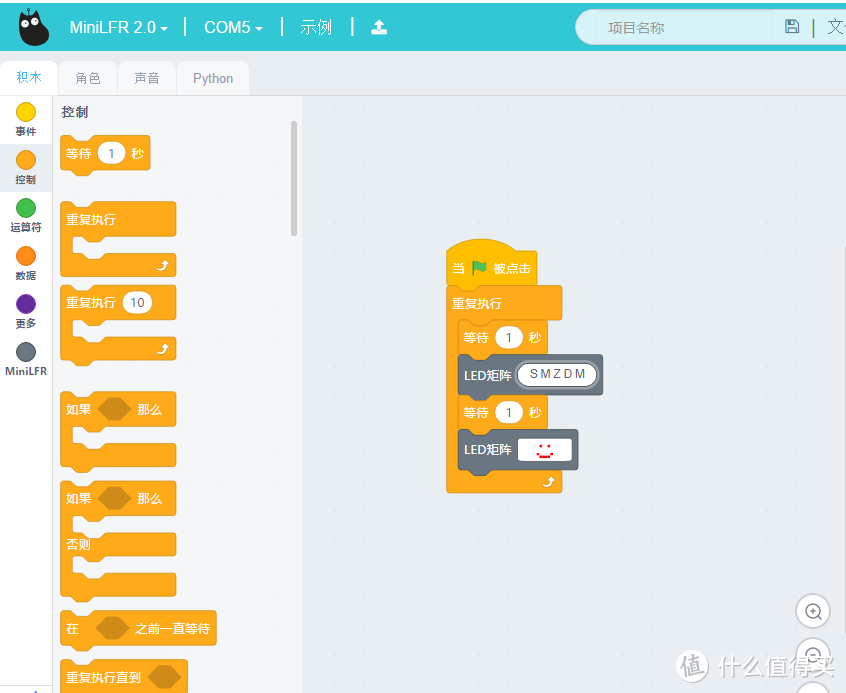
4,贱鼠LED矩阵屏。
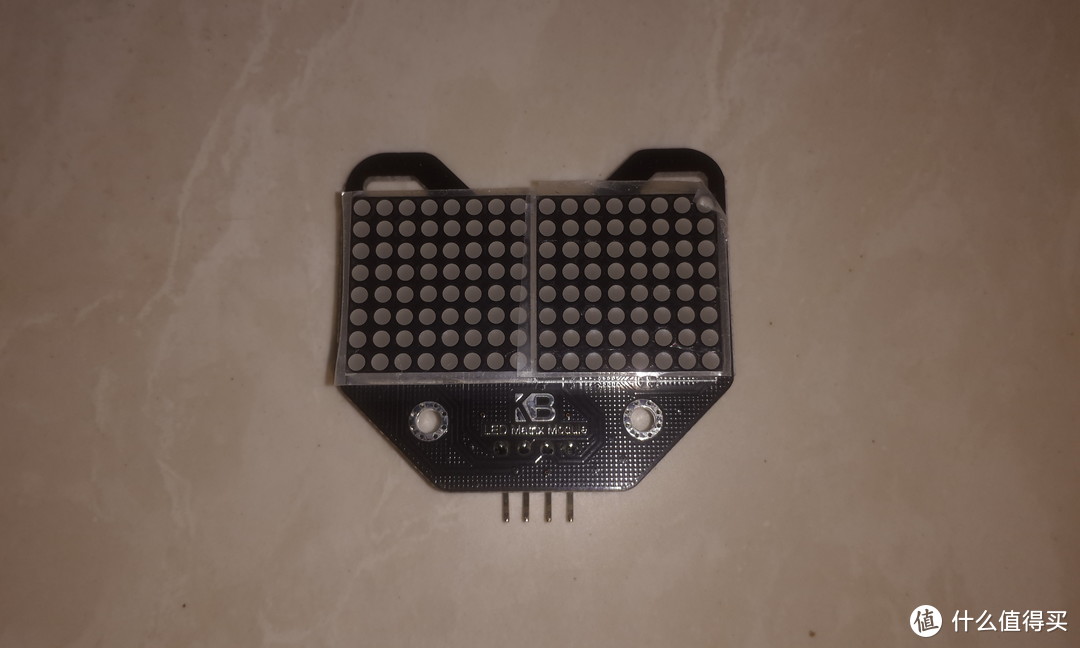
可以编辑文字、字母和表情符号等,但因为阵列有限(16×8),不太适合编辑笔画较多的汉字。
实际效果。
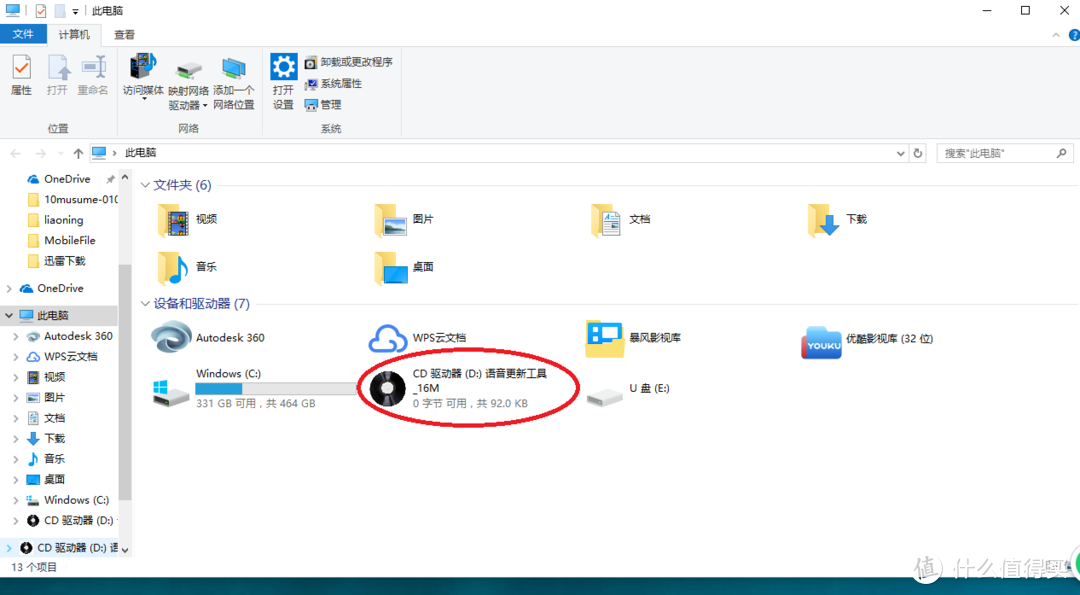
5,萌熊MP3模块。首先用数据线连接MP3模块,准备烧录歌曲。
查看我的电脑,可见语音更新工具。
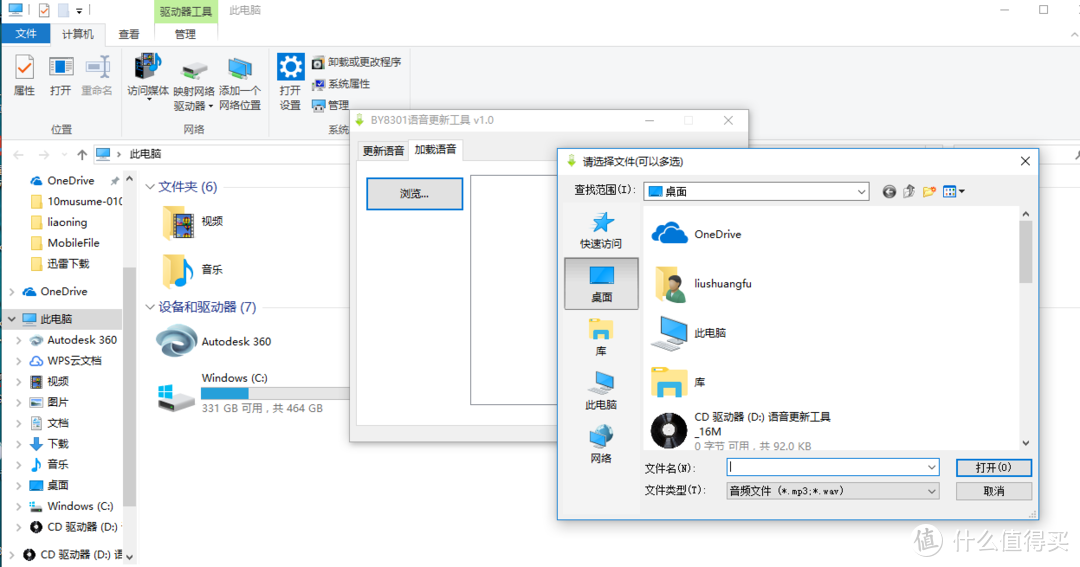
加载本地语音文件,支持mp3和wav格式的音频文件。
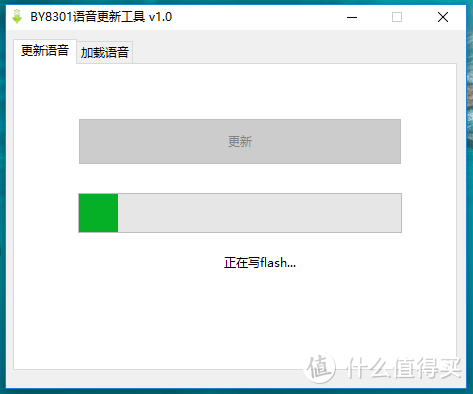
上传了一首10M的歌曲,大约花费二十分钟,比较慢,一度以为出故障了,重复操作了好几次。
写入完成后,试机正常,喇叭声音还挺大(默认最高音量,可调整)。但似乎就是这次操作后,小圆车巡线和避障等功能就不正常了,恢复固件也没有成功,报了一个故障,“Arduino Fail 1”。
后来扣掉电池,放电,换数据线,反复恢复固件,操作了几次才好。
6,红外遥控操作。遥控器使用纽扣电池,出厂时也带有挡片,使用时取下。
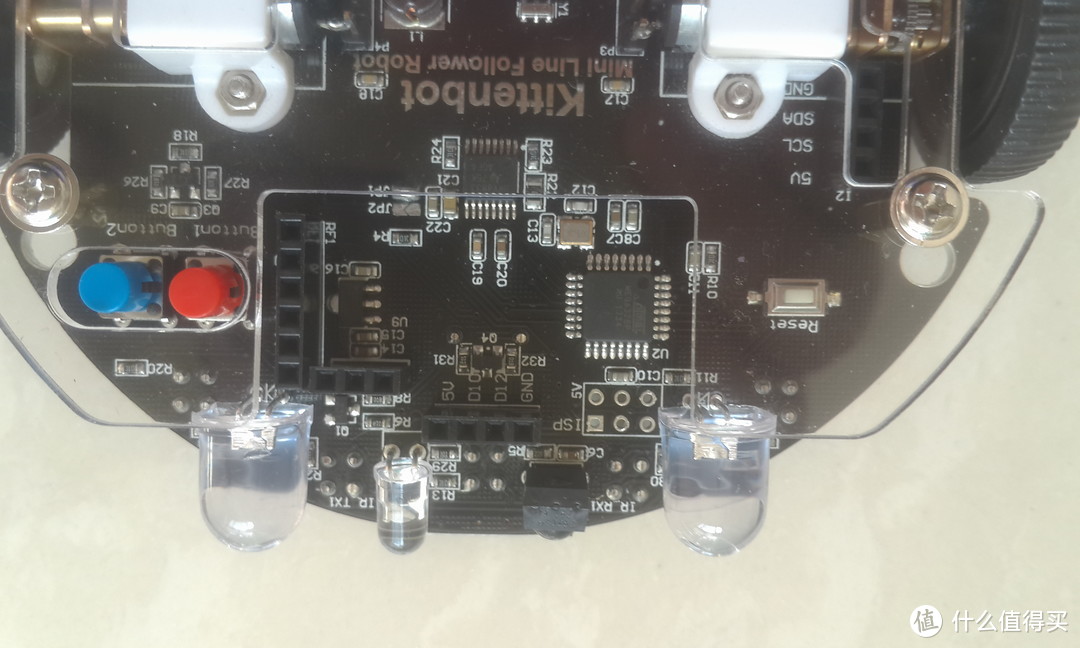
 小圆车电路板上的红外发射管和接收管。
小圆车电路板上的红外发射管和接收管。
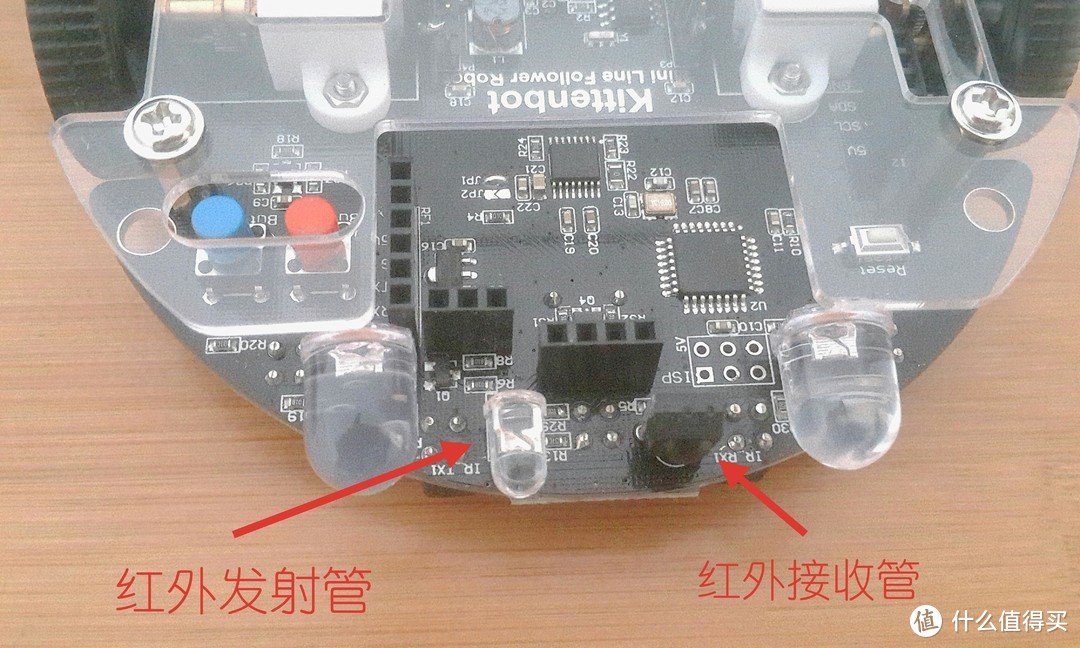
编一个简单的程序并上传,按键1开右灯关左灯,按键2相反,按键3全关。
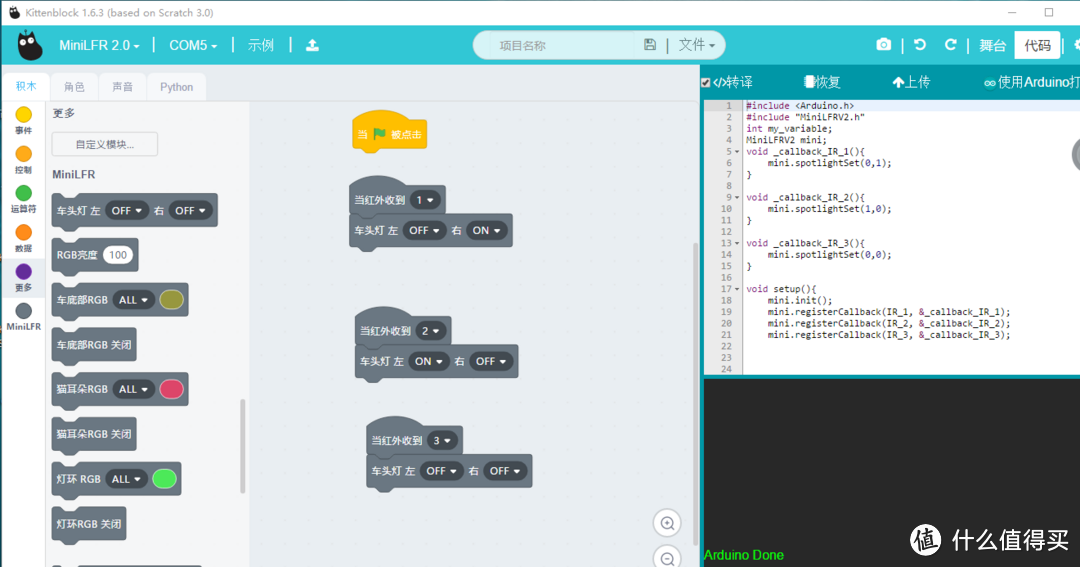
实验效果,动作正常。
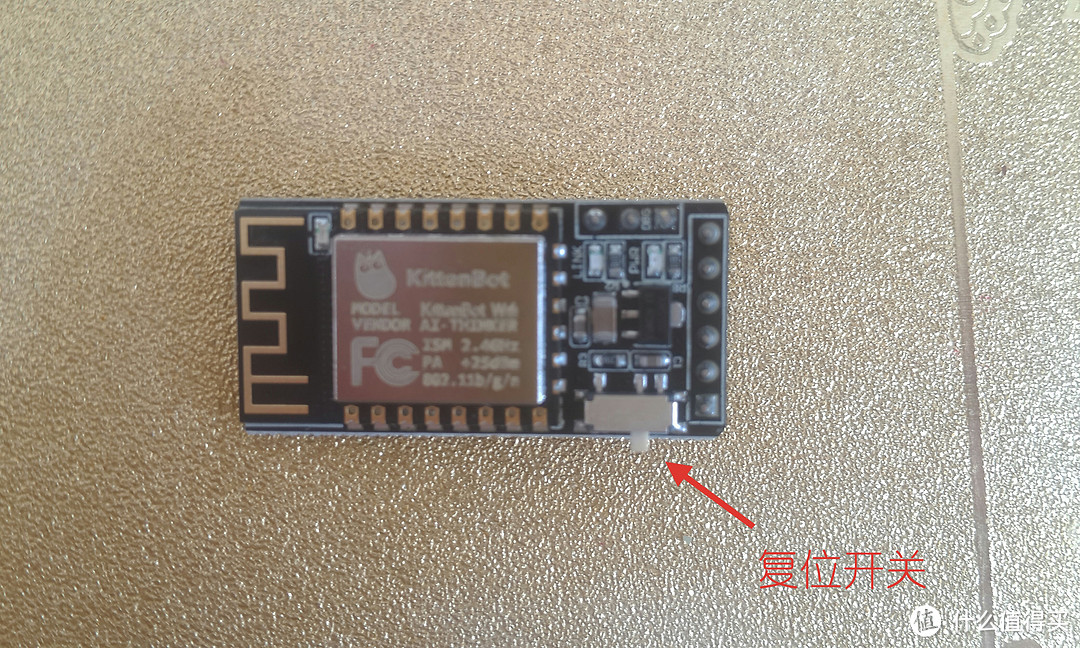
7,WiFi模块的简单连接和应用,模块带有复位开关,用于重置操作。
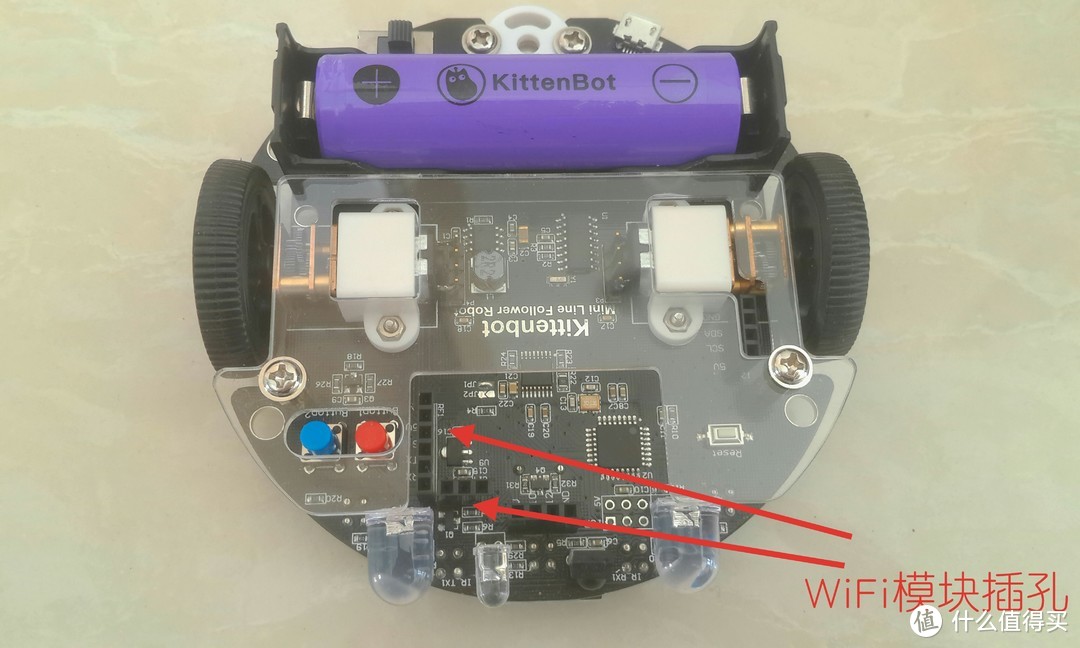
小圆车主板上的WiFi模块接口。
安装好模块并打开电源开关,稍候可以在电脑上查找到“ESP_047A68”,点击连接。

编程软件上的串口连接修改为小圆车的IP地址,稍等片刻连接成功。这时电脑和小圆车组成一个局域网,不使用数据线也可以进行在线操作和数据传输了。
随便编写一个简单的程序试机,效果和使用数据线是一样的。
五,总结
KittenBot迷你巡线小车刚刚到手时,看起来很复杂,自己琢磨了两三天,无从下手的感觉,在群里也和大佬们提出了很多看起来很幼稚的问题。后来慢慢理顺了,举一反三,越玩越有意思了。
对于小学生来说,可能略显高深了点(可是小学生也能驾驭王者荣耀),适合物理或手工老师们拿来做教具。在工业和民用自动化领域里,往往一些硬件的应用也需要简单的编程,通过专业的软件研发,推送到前台的可编程逻辑控制越来越简单,可操作性越来越高了。如本款小圆车编程,使用的积木图形;PLC控制器编程,使用的是梯形图;伺服电机控制器的编程,使用的是有限的(十几或几十个)简单命令。玩转小圆车,可以培养孩子们的动手操作能力和逻辑思维能力,关键是它不枯燥,可以寓教于乐。
KittenBot迷你巡线小车及各个模块的做工也不错,覆铜板厚度够用,焊点饱满,用料实在,运行基本稳定,软件研发一定付出了辛苦的劳动,虽然不是十全十美,效果也还理想。通过这段时间的体验,感觉在工艺上还有可改进的地方:(1)没有适合抓握的位置,尤其在运行中要停车的时候,最好抓的地方是两个车轮,但抓车轮会堵转,对电机不好。当然可以通过编程使用红外遥控器来停车,如果能在电池仓两侧突出适合抓握的位置,会更方便;(2)车头部分布置局促,在安装矩阵模块和超声波模块的时候,还没有安装到位,模块底部就和红外发射管和接收管发生碰撞,尤其是猫头超声波,因为虚接,可能在小车运动过程中掉下来。
总之,KittenBot迷你巡线小车的可玩性很高,如果发现新的拓展模块,会继续入手,到时再和大家分享。
本文商品由什么值得买提供,并邀请用户撰写评测报告。更多新奇好物请关注众测活动~
















