


































































233
135
2022年智能扫地机器人选购攻略
2022-12-01 19:35:55
2点赞
3收藏
0评论
大家好,我是数码智能家居爱好者工业哥。
2022年的今天,扫地机器人对于大部分家庭来说可能更像必备电器,而不仅仅是个好玩的新鲜玩意。
扫地机器人刚发明时,仅仅只能扫地,而后功能不断增加:自动拖地、自动洗拖布、自动集尘、自动消毒、自动上下水......可以说你能想到的一切关于清洁的功能都被逐步添加到这个小东西上面。
那么,扫地机器人该如何选购呢?今天这篇文章将告诉你答案。
一、扫地机器人基础知识
1.扫地机器人的定义
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
2.扫地机器人是怎样实现自动化清扫的?
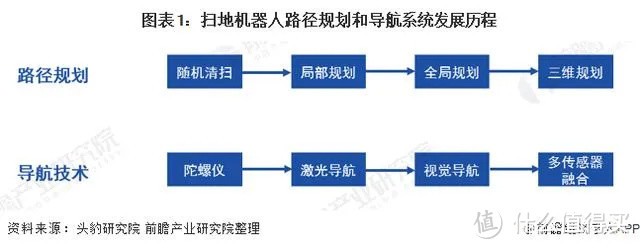
扫地机器人的自动化清扫实现,包括下列几个环节:环境感知、地图建模、路径规划。
通俗的讲,环境感知就是通过各类传感器感知周边室内环境情况;地图建模就是依据机器人“看到”的信息,在系统内创建出整个环境的详细地图;路径规划则是根据地图数据,以及作业规程,制定出行走的路径。这几个环节结合起来,就构成了整个扫地机器人的工作原理流程。
2.1扫地机器人的环境感知能力
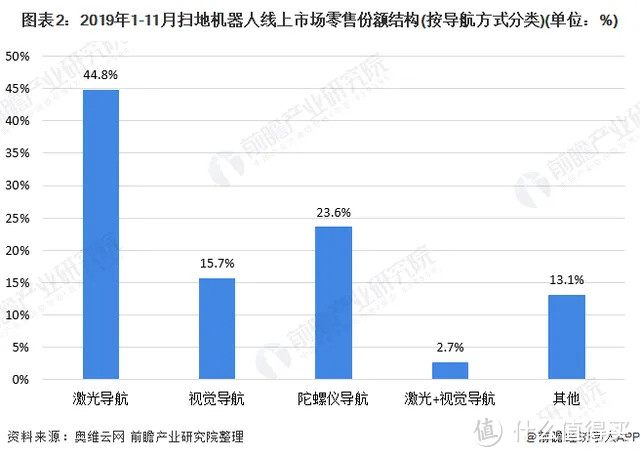
扫地机器人在发展阶段,曾经使用过很多种类的环境感知手段,从最原始的机械随机碰撞法,到超声波、红外线感应等等。随着时代进步,这些原始的感应方式逐步被淘汰,目前的扫地机器人主要使用SLAM技术进行地图建模,具体技术路径包括激光导航、视觉导航两大类。
激光SLAM比VSLAM起步早,框架已经初步确定,因此产品落地相对成熟,主要分为单线式和多线式。
激光SLAM导航是利用扫地机器人上的激光测距仪测量设备与周围物体的距离,然后通过算法计算出相应的位置,再根据测量出的数据扫描出一个完整的地图模型,最后扫地机器人根据地图进行导航作业。
基于视觉的SLAM又称为VSLAM(Visual SLAM),目前的主流算法是基于RGBD的深度摄像机,分为单目、多目、结构光(进一步分为单目结构光和多目结构光)、ToF等。视觉导航通过视觉传感器可以获取海量的环境信息,拥有强大的场景辨识能力。这对搭载视觉导航技术的扫地机器人在重定位、场景分类、避障上等有着巨大的优势。
现在有些新产品,结合了激光、视觉导航方式,环境识别和路径更加精准,但是相应的价格也更高。
2.2扫地机器人的地图建模
对移动机器人来说,其所处的环境基本是未知的,构建地图需要机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的,这即移动机器人导航中常见的SLAM技术。
常用的环境地图可以大致分为三种:拓扑地图、特征地图、栅格地图。每种表示方法都有自己的优点和缺点。
1.拓扑地图(Topological Map)
拓扑地图是一种保持点与线相对位置关系正确而不一定保持图形形状与面积、距离、方向正确的抽象地图,它经过简化及调整,只保留重要信息。其优点是:有利于进一步的路径和任务规划;存储和搜索空间都比较小,计算效率高;可以使用很多现有成熟、高效的搜索和推理算法。缺点在于拓扑地图的构建要求节点特征明显,对全覆盖路径规划有一定局限性,对环境的描述信息有限,无法用于判断是否已经完成遍历。在智能扫地机器人应用中,拓扑地图节点往往用位置坐标作为特征,而地图本身在表示单元域分割法中的单元域链接问题中有较为出色的应用。
2.特征地图(Feature-based Map)
特征地图,也称几何地图,是指对从机器人传感器上采集到的环境信息进行共性筛除、特征提取后,得到简单的几何信息特征(例如点、线段、圆弧或曲线),以此为描述关键建立地图的方法。特征地图定位准确,模型易于由计算机描述和表示,参数化特征也适用于路径规划和轨迹控制,但特征法需要特征提取等预处理过程,对传感器噪声比较敏感,适于高度结构化环境(如办公室、教室及家庭等),特征地图与路径规划方法中的模板匹配法也有很高的适应性。
3.栅格地图(Grid-based Map)
栅格地图是一种对现实中真实地图数字栅格化的产物。它将环境分解成一系列离散的栅格,每个栅格有一个值,栅格包含了坐标、是否障碍两类基本信息,用每一个栅格被占据的概率值来表示环境信息。栅格地图是一种近似描述,易于创建和维护, 但当在大型环境中或网格单元划分比较细时,网格法计算量迅速增长,需要大量内存单元,使计算机的实时处理变得很困难。
上述三种构建环境地图的方法,各有优劣,目前还没有哪一种能非常完整而又高效的对机器人所处环境进行建模。为了扬长避短,使用混合地图有时可以有效减轻单一地图所带来的问题。
2.3 扫地机器人的路径规划
在扫地机器人的初始阶段,没有路径规划这个概念。当时的扫地机器人是随机路径法,随意在室内漫步,碰到障碍物就随机换个方向,精度和效率都很差。
随着技术的进步,各大厂家都开始采用更加科学的路径规划法,大幅度提升了扫地机器人的工作效率。路径规划方法包括人工势场法、栅格法、模板模型法,模糊控制算法,神经网络路径规划,遗传算法等等,专业性比较强,在此不再赘述了。大家只要明确路径规划式清扫比随机路径式清扫更先进就可以了。

3.单一功能的扫地机器人和扫拖一体机器人该怎么选?
扫地机器人最初出现时,只有扫地吸尘功能,扫地结束后还需要人工拖地。人类既然打算借助技术偷懒,那就要偷到底,所以我们又发明了扫拖一体机器人。
如果预算有限的话,倒不建议买扫拖一体,因为低价的扫拖一体机器人的拖地功能往往表现很差,后面还是得人工补一遍,不如购买单一功能效果好的扫地机器人,比如iRobot i7,小米 1s等等。
在预算充足的前提下,推荐购买好一些的扫拖一体机器人,达到最好的自动清扫效果。
二、了解品牌
下手买之前,我们先要了解品牌。下图展示了2020年线上、线下渠道扫地机器人的市场份额情况。
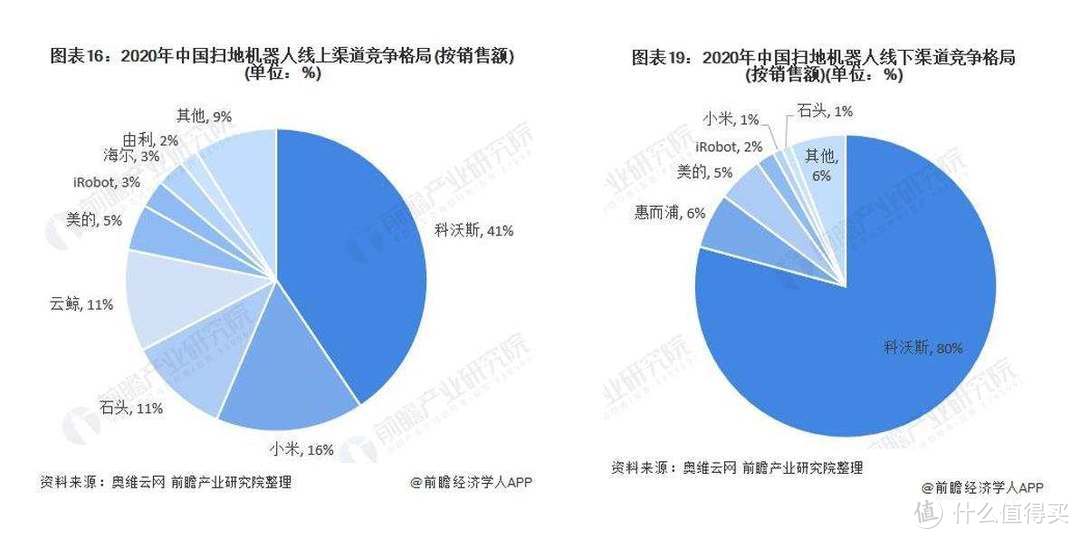
可以看到科沃斯占据了绝对优势,尤其是线下市场占有率高达80%。其余品牌有小米、石头、云鲸等等。
科沃斯(ECOVACS)集团成立于1998年3月,2006年进入大陆市场,是A股上市公司。科沃斯是业内同时拥有LDS SLAM激光导航和VSLAM视觉导航两项主流导航技术且有产品落地的企业,科沃斯目前主力产品有T7、T8、T9、D系列等。
石头科技(roborock)是小米生态链企业,它采用 LDS 激光测距传感器扫描房间获取精准距离信息以及陀螺仪数据、里程计数据、加速度计数据等全方位数据计算,通过 SLAM 算法实时构建环境地图。采用先沿边后 Z 字形清扫路径,同时搭载大风力无刷电机逐一分区实现强劲清扫。
云鲸智能(NARWAL)是最近快速崛起的一个品牌,销量增长非常迅猛。云鲸主打扫拖一体产品,不仅拖地清洁效果极佳,还能够自动清洗抹布,在拖地性能上碾压其他同级产品。
三、选购思路
1、买新不买旧
因为近些年技术进步是非常迅速的,技术迭代非常快,前沿品牌。可能一年就要出2代产品。
所以我们在选购的时候最好要买上市一到一年半面的型号,老的型号虽然价格低,但是使用体验跟新的型号是千差万别的。
2、基础配置怎么选?拖地功能最重要!
目前市面上扫地机器人,配置大概有下面几类:
⑴仅充电基站
优点:节省空间,价格便宜。
缺点:功能单一,需要手动清理尘盒,手动清洗抹布拖地的效果比较差。
⑵充电+自动清洗拖布基站
优点:能够自动清洗拖布,而且拖地的效果非常好。
缺点:基站的体积比较大,占有一定的空间,而且价格较贵。这种基站有的需要手动加水倒水,有的带有自动上下水功能。
⑶充电+自动集尘基站
优点:自动集尘,不需要每次手动清理灰尘。
缺点:售价较贵,而且拖布需要手动清洁,拖地效果也不好。
⑷充电+自动集尘+自动洗拖布多功能基站
优点:兼顾上面2、3类所有优点,既能自动清洗拖布也能自动清理集尘。
缺点:基站占地面积比较大,而且价格最贵。
根据上面这几种配置,工业哥谈谈自己的建议:
扫地机器人中最重要的功能功能,其实不是扫地,而是拖地,别问我怎么知道的。
因此,我有个建议,选购的时候一定重点看拖地功能,以及自动洗拖布的功能。
而自动集尘功能其实重要性要往后放一放。
对于上面这几种配置来讲,在预算充足的情况下肯定选全能型的,也就是充电+自动集尘+自动洗拖布多功能基站。
预算不足的情况下,那就是原则就是优先追求自动洗拖布功能。
至于仅充电的基站,仅推荐预算非常紧张的朋友选购。
而只带自动集尘功能的基站,是最鸡肋的一种,占地面积大,价格贵并且还不好用,建议不要作为考虑选项。
3、特色功能怎么选?
⑴自动烘干
对于扫地机器人来讲,我认为最重要的功能是自动烘干。
拖布这种东西洗,洗完之后如果不及时弄干、水分较多的话,很容易滋生细菌,产生异味。所以我们选择带自动洗拖布的功能时,配套的自动烘干功能,一定要看好。

⑵自动上下水
对于固定住处的用户来说,自动上下水功能非常实用。如果没有这个功能,每次洗拖布都要去接水,然后倒污水很麻烦。
对于条件具备的家庭,比如说家里有厨房卫生间预留了上下水管的时候,自动上下水功能就是神器了。

⑶自动添加清洁剂
有这项功能的时候只用把清洁剂箱放在机器人机身上就不用管了,每次洗拖布的时候,机器人就会自动把清洗剂添加到水中,而不需要每次人工去添加。
⑷银离子除菌
除菌的作用其实跟烘干类似,就是避免拖布产生细菌而产生异味,最好是有这个功能。
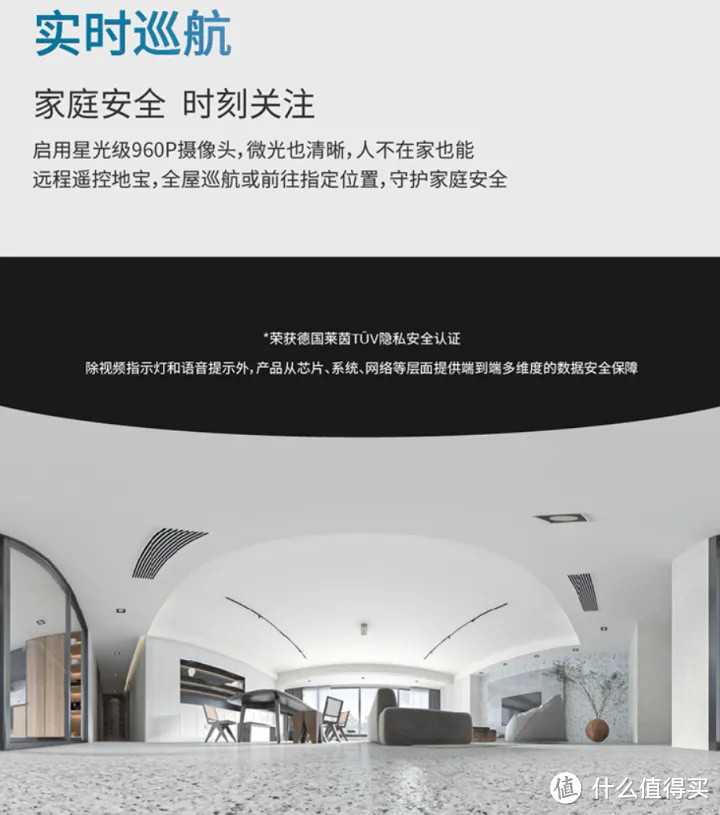
⑸视频管家
通过手机APP连接至机器人上的视觉摄像头,实时查看家中情况。可以遥控机器人到处走走巡逻,比固定摄像头更好用。