















































































233
135
蠢萌小女仆:iRobot Braava 380拖地机器人入手感受
2015-04-21 08:34:50
156点赞
419收藏
102评论
小两口的生活,尤其是两个宅男宅女住到一起的生活,是平静而幸福的。不过做家务总是挺烦的,包括洗碗,扫地拖地,厨房卫生等。
一直考虑着买个自动化的洗碗机来改善生活,可惜厨房当初没规划好,没地儿放,老婆对洗碗机的能力也有疑虑。后来决定,还是先买个扫地机器人吧,之前有同事买了科沃斯地宝丁丁,说挺好用的,另一个朋友买了irobot roomba(具体型号不明),也说非常赞,搞得我也心痒痒的。
最近好容易老婆批了预算,开始研究扫地机器人,一开始只看irobot,看多了资料,发现NEATO似乎更智能——通过激光测距扫描建立房间模型,智能规划路线!看视频评测,NEATO的工作状态真是赏心悦目,像贪食蛇一样扫过所有空间而很少重叠,扫完了根据路线记忆毫不犹豫直奔充电底座,高效率,冷静而聪明!相比之下,irobot虽然算法比国内山寨货优异,但是仍然是随机乱窜,路线重复,对于我这种程序员技术宅来说,实在不能忍啊!irobot扫地时间要长很多,虽然可以更干净(因为irobot可能反复路过一片地方,而NEATO是只走一遍),但是适合眼不见为净,外出时候丢家里自动工作。
作为技术宅,我心里已经决定,扫地机器人一定要有路径规划!
NEATO虽然好,但是了解下来,似乎也有些问题,就是低端型号没有边刷,角落扫的不够干净;此外据说质量不如irobot稳定,故障率略高;噪声大(原配胶刷的原因,但是可以加钱换毛刷来降低噪音)。
随后又看资料发现Mint拖地机器人也是由路径规划的,只是它的原理不太一样,叫北极星定位系统,是通过配套的导航仪发射在天花板上的激光信号来定位,从而可以记住自己走过的路,往没走过的地方去试探,虽然不如NEATO的激光探测那么准确和智能,也会撞,但是已经比irobot好不少了。再一搜,咦,Mint被irobot买了? 但是发现iRobot买了Mint之后,只是改个名字,以iRobot Braava拖地机器人系列来卖,并未把这个北极星定位系统用于其他扫地机器人上面。
但是发现iRobot买了Mint之后,只是改个名字,以iRobot Braava拖地机器人系列来卖,并未把这个北极星定位系统用于其他扫地机器人上面。
手工做了这么一张图,大家应该就看比较清楚了吧。

在NEATO扫地机器人和iRobot Braava拖地机器人之间犹豫了许久。最后选择了Braava,理由:
1,我家主要是灰尘和一些头发,用干拖也可以扫掉,而客厅地板是白色地板砖,经常有湿拖鞋造成的印子,或者水果汁液滴下去的水渍,这个用扫地和吸尘是没法清除的,必须用湿拖;
2,便宜,淘宝上的行货只要1899,好几家在卖。而NEATO入门级的XV12就要2799(京东,毛刷版)
[商品:美国俐拓(neato robotics)XV-12S (除螨升级版) 智能扫地机器人吸尘器]
3,质量可能更可靠一些,因为NEATO质量口碑不如iRobot。尤其是NEATO的激光头,容易出问题,一旦故障就杯具了。而Braava传感器较少,又没有吸尘器和边刷,出故障的概率小一些。
给大家看看广告视频:
拖地机器人缺点就是需要人工干预比较多,房间脏的话扫半个房间可能就要暂停换一下拖布,而且一个房间打扫完必须手动拿到隔壁房间去,全部扫完了还要手动插上充电。不过都能接受,毕竟拖地机器人工作噪音很小(扫地机器人是吸尘器原理所以噪音大),可以一边看电视一边看着小奴仆兢兢业业安安静静的埋头苦干,很有国王/女王的感觉啊。

废话不说,上淘宝搜,1899的就是了,下单。晒单怎么能没有商品链接呢,但是淘宝链接不方便发,就发一个京东的链接吧。
[商品:美国艾罗伯特(iRobot) Braava挚爱版 家用智能擦地机器人]
虽然是寄顺丰,但是由于包含电池,走的是陆运,从北京发过来也花了3天才收到。到手外包装就是iRobot标识的纸箱:

内容物:机器人;赠品30*6=180片一次性静电纸,2条原装拖布,5条拖布,2条防撞条,2对2号电池。
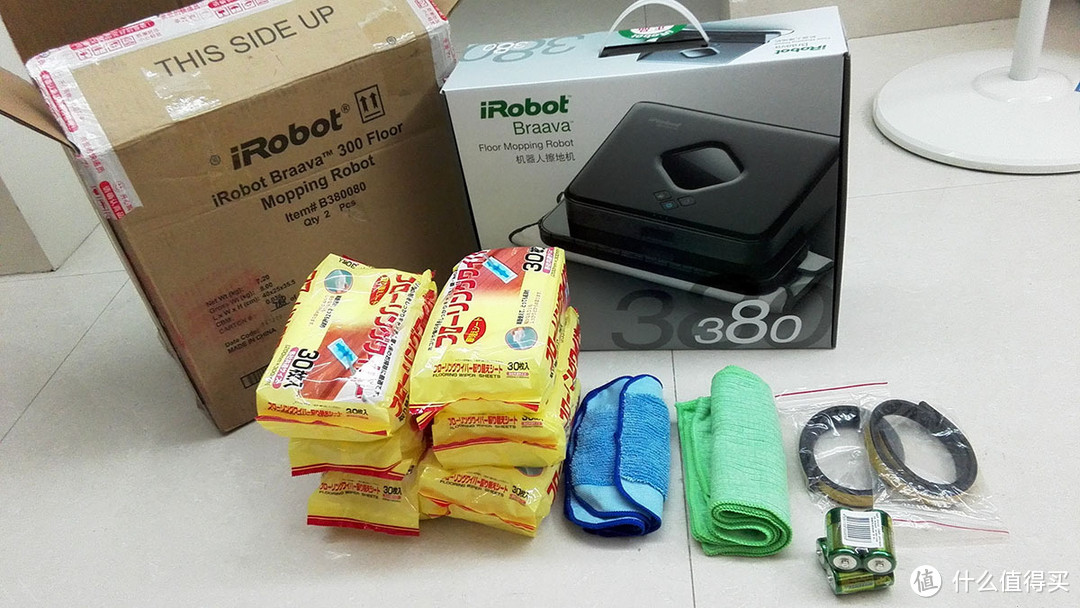
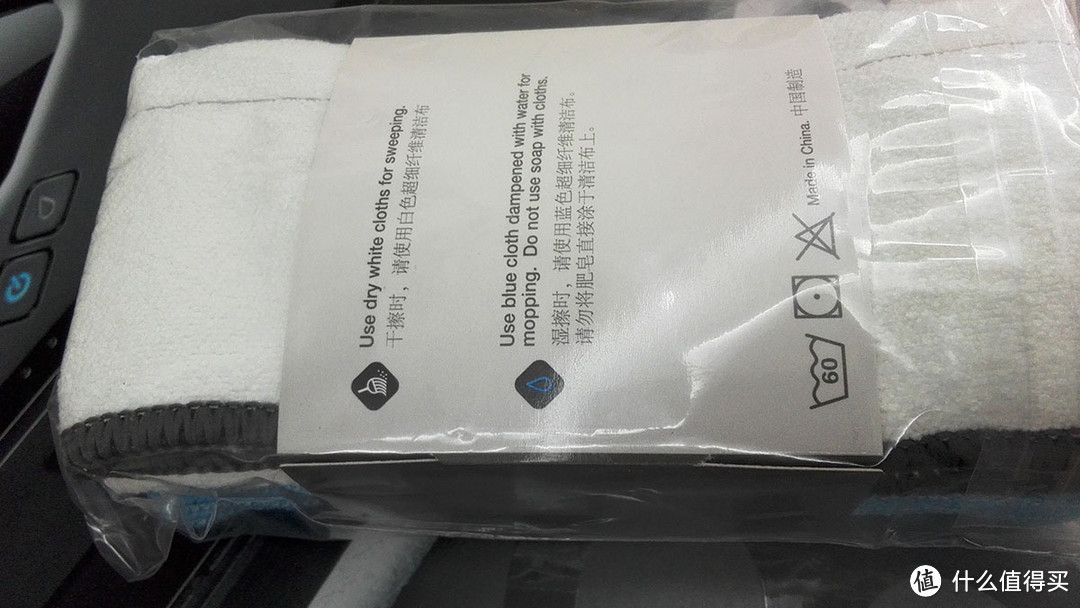
对比,蓝色为原装湿拖布,绿色为山寨拖布(但是不清楚是否可用于干拖)。原厂拖布的毛更长更柔软。

机器人包装箱,都是中文,应该是国内行货了。

机器人+充电器。体积不大,大概一叠杂志的体积和分量。

车轮+电池的部分是独立的,有悬挂系统的,这个红色塑料是用于卡住这部分,包装运输时候避免晃动导致机器人脑震荡。

充电口在肚子上。

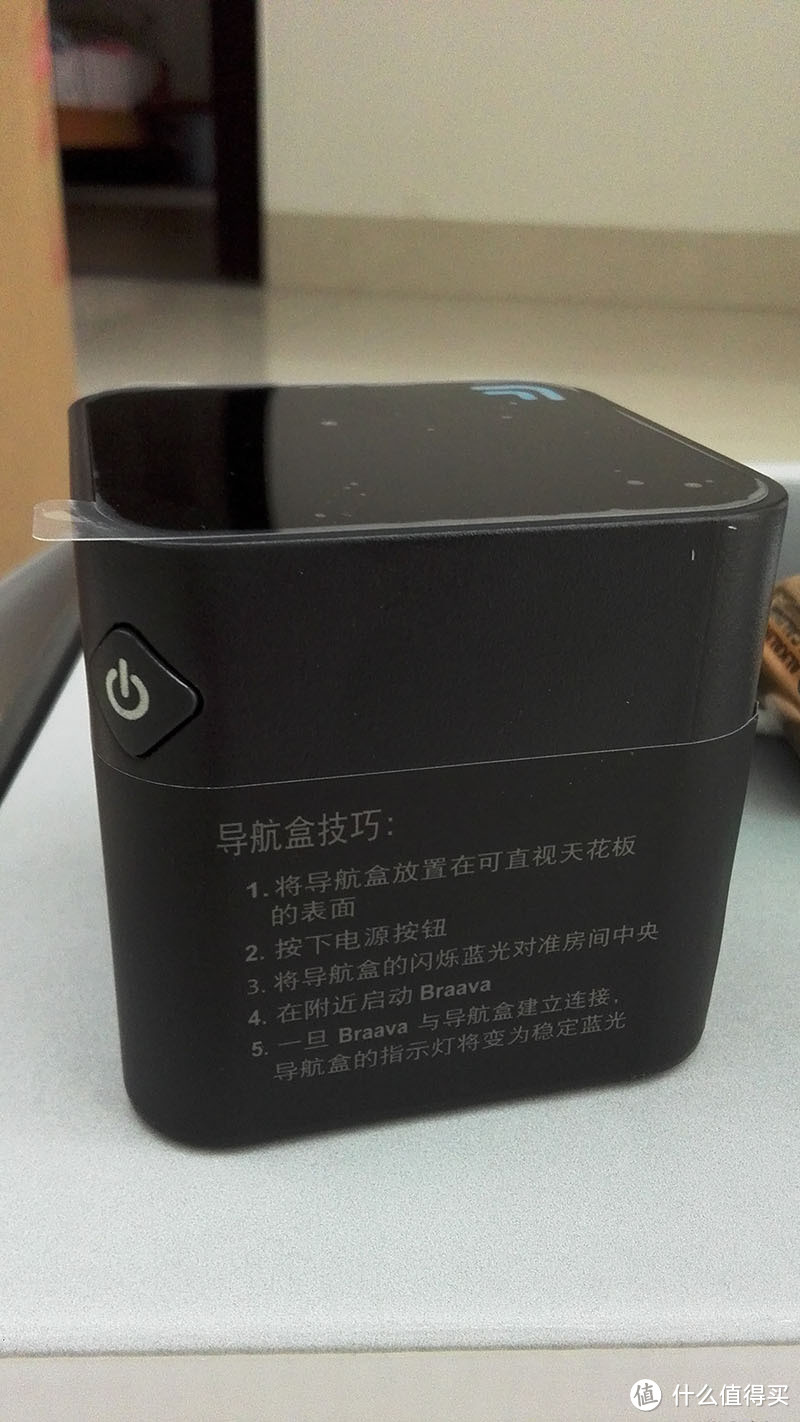
其他附件:导航仪,原配的电池,出水棉塞备用件,一条蓝色的湿拖布,一条白色的干拖布。

导航仪用法:
导航仪用的是2号电池,与常见的5号电池对比。2号电池比较少见,我觉得可以用纸把5号电池卷起来,塞进去,应该也能用。

原厂拖布,舍不得拆。。。。收藏了
储水盒,用于湿拖时候给拖布慢慢加水的。

水会从正中心那个棉塞缓慢渗出。


干拖用的垫板(前),就平整很多了。

干拖的两边是软橡胶,有波浪形的缝,可以把拖布或者静电纸塞进去。而湿拖是类似魔术贴那样的东西,毛巾类材质放上去就会黏住。

废话说了这么多,大家估计也不耐烦了吧,可是用之前要先充电,说明书说第一次充电16小时,慢慢等吧。
——————————— 我是蠢萌蠢萌的拖地鸡分割线 ————————————————————
第二天中午,满16小时,迫不及待拿出来试试。我现在住的是两房一厅,小房间是给老丈人来的时候住的,不过他已经很久没来了,面积最小,打扫也最少,地上障碍物也少些,就先拿小房间试试吧。
我首先装上拖布,准备开工时候考虑到床底下肯定很多灰尘,就先打开了干扫模式。扫了一半才想到,我真笨,应该用静电纸的嘛!-_-b 然后才换了静电纸。

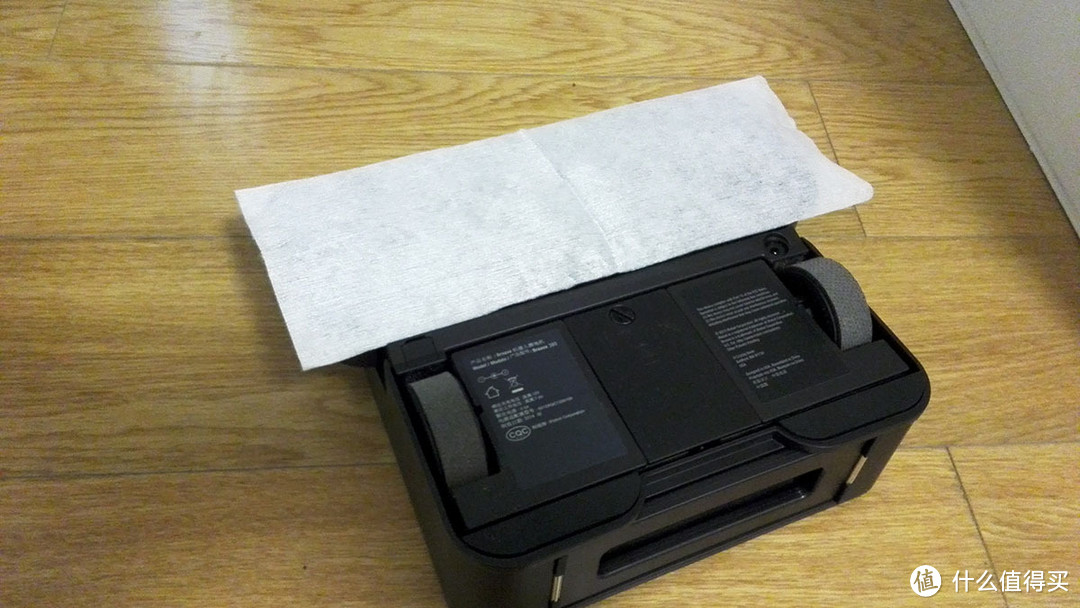
事实证明,干扫情况下静电纸非常好用,比拖布高效多了,可以容纳更多的灰尘和头发棉絮。下图高能,吃饭时不要看!主要是床底的灰尘很多,以后再扫应该好很多。

干扫状态视频(用的是拖布,大家不要学我):可以看到,机器人还是有路径记忆的,它会走直线,遇到墙的话会转个弯,偏开一点距离,走一条回头的直线,跟原来的路线平行。而如果遇到桌腿床腿之类的障碍物,它会绕过去,然后继续之前的直线。如果是墙壁,它会首先试图寻找出口,试探几次确认是墙壁,就会平行于墙壁走。
湿拖状态:大致和干拖一样,不过是Y字形路线,就是往左前方前进,后退,往右前方前进,后退,如此反复,模仿愚蠢的人类的拖地动作。
先干拖,再湿拖,前后大概花了2个小时,才搞完小房间,接下来是大卧室。大卧室有个床头柜,下面的高度大概是8.5cm,有些担心不知道能否进去,干脆拿来试了一下,嘿,恰到好处。


——不过后来发现机器人在下面钻来钻去时某些位置会有些轻微摩擦,于是又用纸箱瓦楞纸板剪了几个脚垫,给床头柜四个脚垫上,抬高大概两毫米,这下就可以放心了。
大房间还没打扫完就没电了,大概工作了三个小时吧,只好插上去充电。第二天继续打扫,拖地,第三天才打扫客厅,因为客厅杂物比较多,必须收拾一下。此外,有些地方可能会对机器人造成障碍。比如这个电视柜,下面部分高度4.5cm,刚好机器人的拖把头可以伸进去,身体会撞上,而碰撞感应是装在拖把头,所以会感应不到碰撞。为了避免这种情况,我特意找了根棍子给挡住了。

棍子的安装,是用纸箱的纸板,钉在棍子上,然后把纸板压在电视柜的脚下。我太聪明了 里面还放了个重物(闲置电视机底座)抵住棍子中部,避免棍子碰撞变形。
里面还放了个重物(闲置电视机底座)抵住棍子中部,避免棍子碰撞变形。

茶几下方的高度也是4.5cm,也是比较尴尬的高度。用东西挡又不好看。其实机器人如果被挡住,即使没有感受到碰撞,但是发现没法前进了的话,过几秒钟也是会自动退后绕开的,不过我认为这个效率会低一些,而且费电。此外,由于我用的是地板砖,很光滑,前面被挡住后轮胎可能会打滑,机器人就以为仍然在前进,从而无法得知被挡住了。综上,还是想办法解决一下比较好,要么找东西挡住,要么垫高让机器人通过。

想想茶几下面用什么东西挡住都不好看,影响观瞻,干脆垫高吧。上淘宝定制了四块直径7.5cm、高度5cm的圆形松木块,32元包邮,作为茶几的脚垫,用双面海绵胶固定,把整个茶几抬高5cm,这样下面的高度就足够机器人进出了。定制要有几天周期,还没收到,照片就不发了。
——————————————— 小女仆使用经验分割线 ——————————————————
经过几天时间的使用,有了一些经验,跟大家分享。
导航仪要放在能直射天花板的地方,并把蓝色标记的一角对准房间中心。虽然导航光肉眼不可见,但是在手机镜头下还是可以拍到的,某个特定角度可以拍到里面的LED,估计是紫外线。一共有两颗,光轴与顶部平面大概呈60度的样子,方向是蓝色标记指向的方向。


机器人必须工作起来,走一段路程后,才会识别到导航,导航仪的蓝灯从闪烁变成长亮,表示已连接。我的判断是,机器人要通过天花板的不可见光斑作为定位点,并通过自身位置变化,用三角函数来计算出天花板高度,然后才能基于此计算自己的位置。所以我的经验是,机器人的起始位置要放在距离导航仪不太远、前方有较长一段空旷路线,才能较快认到导航。
在工作过程中,如果撞墙,机器人会停下来,指示灯闪烁两三秒,然后指示灯长亮,应该是在识别天花板上的导航信号。不过有时候在床底下也会这样,而且指示灯也长亮,我就不清楚丫到底是有没有认到导航信号了。
有时候,它还会径直回到空旷位置,认一下信号,思考一下,然后再转身前往其他地方。据我长时间观察,大部分情况下它会前往边角、边缘,以及未扫过的区域。未扫过的区域自动去打扫是正确的,去边角墙角干嘛呢?我估计,可能它的逻辑就是要把边角也扫干净吧。
机器人前部有个小窗口,肉眼看不到异常,不过在手机镜头下可以看到里面也有两颗紫色LED,仔细观察可以发现,如果碰到障碍,灯会熄灭,左边有障碍左边灯熄灭,右边有障碍右边灯熄灭,如果是前面有墙就都熄灭,感应距离大概是30-40公分。感应到前面有障碍时,机器人会减速,以比较低的速度去碰撞。碰撞感应是在拖把头的前面。
脱困能力也不错,我放在客厅,1张餐桌+6张餐椅,算比较复杂的情况了,它也基本可以进出自如,没被困住过。据我长时间观察,如果遇到障碍,它的反应是:柱子:绕行->装到另一根柱子:转弯->再碰到柱子:原路倒退一小段距离,转弯错开一些距离继续前进。大概就是这样。
覆盖率方面,据我长时间观察,相当不错,基本都会覆盖到,并且大部分区域都不会反复打扫。可以很明显感觉到它有路线和区域的记忆,路线很规整,一行一行的,跟人差不多,也会自行前往未打扫过的区域去打扫。
——你问我怎么了解这么多?废话,我有长时间观察啊 想象一下每次机器人默默工作,我在旁边饶有兴致亦步亦趋围观上一两个小时直到打扫完毕的场景
想象一下每次机器人默默工作,我在旁边饶有兴致亦步亦趋围观上一两个小时直到打扫完毕的场景 请脑补这个画面,动作神态可以参考好奇的小盆友蹲在地上专注地观察蚂蚁搬家的场景……
请脑补这个画面,动作神态可以参考好奇的小盆友蹲在地上专注地观察蚂蚁搬家的场景……

看它工作的状态,会让人感觉它是有智力的,在开阔区域它会像人类那样笔直的一来一回的逐行打扫,高效全覆盖,而碰到障碍时会以比较聪明的方法去试探,或者后退,绕开。在旁边看着它工作,似乎也能感受到它的情绪,开阔地带笔直前进打扫时的轻松,碰到床腿绕开时的小心翼翼,走入墙角反复碰壁时的迷茫和犹豫,终于走出困境时的欢快……就好像一个小女仆,安静、听话、乖巧,有时候又挺笨,让你又好气又好笑。
——如果是Roomba或者国产扫地机器人那种随机路线型的,恐怕就不会有这种感觉了吧,只会觉得就是个机械玩具,顶多也就是满地乱窜撒野的小狗。
至于干净程度方面,我只能说,还能接受,想象一下你拖地板,如果拖一个房间不漂洗拖把,会是什么样子吧。至少很明显的水印、鞋印之类还是可以打扫掉的,只是会有些脏水抹过的痕迹,白色地板砖表面有些发暗,不那么亮。如果要干净点,要么多暂停几次,多换拖布,要么就经常拖,一天拖一个房间,三四天轮一次,不信还不干净。
但是!
但是呢,换下来的拖布总要洗吧,这个就 不过好在拖布有好几块,可以泡着攒在一起洗。此外,没法预约定时、没法自动回航充电,每次工作需要人工装上拖布或静电纸,放到房间,打开导航,打开机器人工作模式;打扫完了需要人工抱走,插上充电,换下拖布……而且电池有寿命,用上一年可能就会老化,换电池三四百块……
不过好在拖布有好几块,可以泡着攒在一起洗。此外,没法预约定时、没法自动回航充电,每次工作需要人工装上拖布或静电纸,放到房间,打开导航,打开机器人工作模式;打扫完了需要人工抱走,插上充电,换下拖布……而且电池有寿命,用上一年可能就会老化,换电池三四百块……
听起来很麻烦,是吧,你会说,那我买这玩意儿干嘛呢?!两千大洋,请清洁工都可以请多少次了,绝对更干净更高效!
但是,至少我现在可以每天花几分钟,就可以保持地板的基本清洁,而不用等到周末再花半小时打扫和拖地,尤其是床底下难以扫到的地方,机器人也可以轻松打扫干净。每天几分钟做完的事情,跟半小时才能做完的事情,心理感受是完全不一样的。机器人打扫的时候,我可以放心做其他事情,可以出门逛街,可以躺在沙发上看电影,上网,过两个小时再去看看机器人是否工作完,拿走充电就行了。
至于请清洁工,现在也没那么好请,50块钱一次人家可能都懒得上门,而且我要等她上门,要等她工作完,这段时间我就没法走开。机器人就自由多了。
退一步说,机器人确实没法取代人工扫地拖地,但是我就把它当一个大玩具,不行吗?别人可以花上万配一台超高性能的电脑,或者五六千买个iphone,而我用着六年陈的老电脑、几百块的华为荣耀3C也觉得够用,这价差也有好几千吧?对于工具,当然够用就好,但是对于玩具,喜欢才是最重要的,何况这个玩具确实有用。只希望这个小女仆可以坚持久一点,不要那么快被我玩坏了。(此句删掉)
——男人从未长大,只是玩具越来越贵。
















chrisnb
校验提示文案
阿司匹林雪茄
校验提示文案
sdgh3dd
校验提示文案
[已注销]
校验提示文案
夫仔
校验提示文案
Scarlettlj
校验提示文案
Scarlettlj
校验提示文案
小小小隼
校验提示文案
兔斯基大官人
校验提示文案
air318
校验提示文案
板状千枚岩
校验提示文案
nothingy
校验提示文案
爱尔兰熊猫
校验提示文案
加菲猫99
校验提示文案
小胖墩儿0919
校验提示文案
歆歆相印
校验提示文案
蓝蓝天白白云
校验提示文案
susux2015
校验提示文案
hh7856
校验提示文案
被封的摸你卡
校验提示文案
歆歆相印
校验提示文案
susux2015
校验提示文案
蓝蓝天白白云
校验提示文案
阿司匹林雪茄
校验提示文案
自由行走的花呀
校验提示文案
不懂哦
校验提示文案
值友8641030548
校验提示文案
小胖墩儿0919
校验提示文案
加菲猫99
校验提示文案
爱尔兰熊猫
校验提示文案
小浅玩机
校验提示文案
米家吃吃吃
校验提示文案
板状千枚岩
校验提示文案
淮安楚楚
校验提示文案
nothingy
校验提示文案
压力克斯
校验提示文案
whiskey
校验提示文案
Darker丶
校验提示文案
值友4736320359
校验提示文案
板状千枚岩
校验提示文案