


























































19
28
扫地机器人选购篇(上)
2022-04-30 21:18:46
3点赞
0收藏
0评论
欢迎来到大禹的选购笔记-扫地机器人篇,想先来问问大家对扫地机器人的印象怎么样? 我想应该是比较两极化的吧,不少人的眼里扫地机器人可不是什么智能,而是专门来添乱的小智障
我想应该是比较两极化的吧,不少人的眼里扫地机器人可不是什么智能,而是专门来添乱的小智障 ,有些扫地机器人真的拉垮,但是疫情以来,大家宅家的频率变高了,对家里的清洁要求也变高了,所以从20年开始,需求牵动着这个市场来了一波快速的技术发展,扫地机器人从以前的难用变成可用,一直到今天,终于有几台能算得上是真正的好用。所以今天结合相关的参数给大家带来一篇机器人选购指南!
,有些扫地机器人真的拉垮,但是疫情以来,大家宅家的频率变高了,对家里的清洁要求也变高了,所以从20年开始,需求牵动着这个市场来了一波快速的技术发展,扫地机器人从以前的难用变成可用,一直到今天,终于有几台能算得上是真正的好用。所以今天结合相关的参数给大家带来一篇机器人选购指南!
一台好用的扫地机器人应该具备成熟的建图导航系统,强大的清洁能力以及尽可能少的人工干预,所以我把选购要点分成了SLAM导航系统、清洁能力和人工干预三个部分。
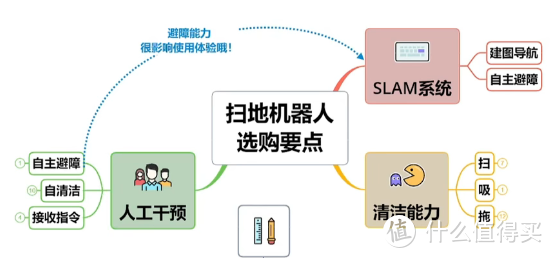
相信我的评判标准也符合大家的选购预期。
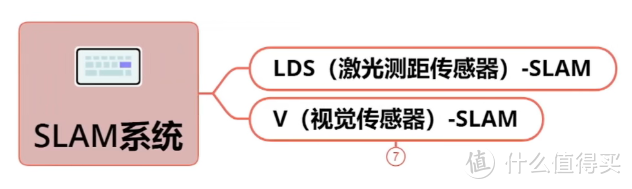
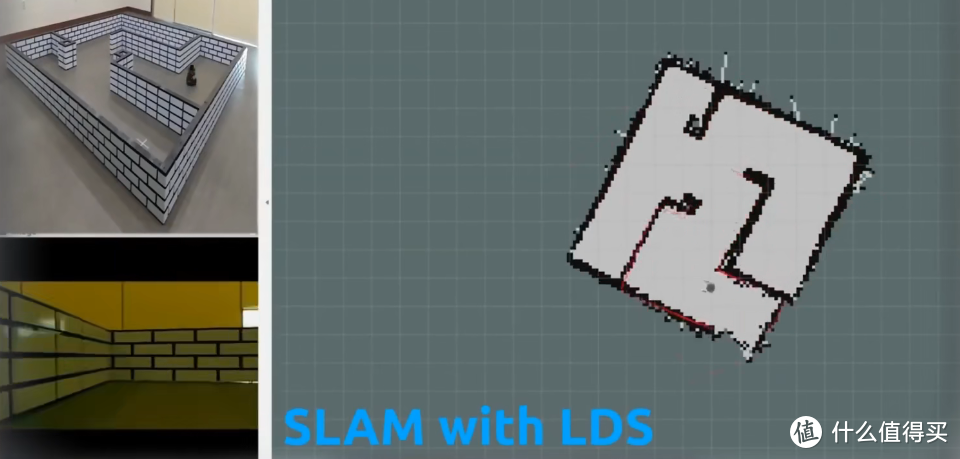
首先,值得购买的扫地机器人一定要配备SLAM系统来智能规划路径,躲避障碍。目前实现这个系统有两种主要的技术方案,一种是使用激光测距传感器的“LDS-SLAM”,一种是使用视觉传感器的"V-SLAM"。产品移动导航跟避障的性能差异就体现在这里。目前大多数产品使用的都是LDS-SLAM方案,因为它的技术最成熟。(LDS是激光测距传感器laser distance sensor的缩写)
激光测距传感器本质上是一台旋转的激光测距雷达,通过测量与旋转平面内所有遮挡物的距离,能比较精确地绘制出阻挡物的边缘形状。随着机器人的移动,计算模块根据一定的算法能整合捕获到的边缘线条,最终就能绘制出整个房间的2D地图。有了地图信息,机器人清扫时将当前四周阻挡物的边缘特征与地图进行匹配,就能知道自己在地图中的什么位置,实现定位的功能。
激光雷达能测距,当然就能探测出有没有阻挡物,用来避障自然也不在话下。LDS只能测量距离,数据准确,但不够丰富。相比之下,V-SLAM给扫地机器人装上相机,获得更加丰富的信息,再通过机器视觉相关技术实现SLAM系统。V-SLAM的软件部分是全局优化算法,那它的硬件部分相当于一个视觉里程计,这是一个根据相机拍摄到的图片序列来确定扫地机器人位置跟姿态的模块。这里我们主要关注硬件也就是相机的差异,一共分为两类。
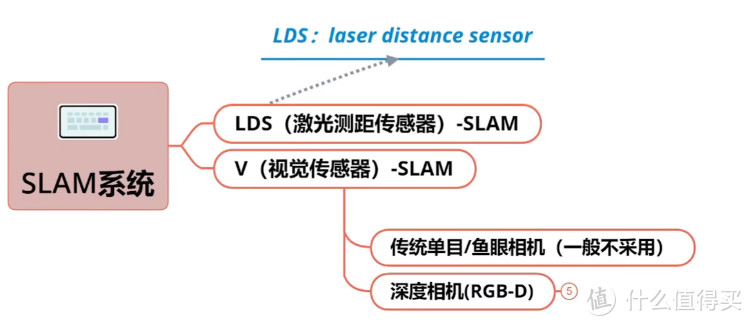
第一类是传统单目相机,这种相机只能获取彩色或者灰度图像,通过提取并匹配相邻帧的特征点,计算出特征点在两帧之间的变化关系,就能反推出机器人自身的位姿变化,但这种变化是2D到2D的,就好像我们人类被蒙住了一只眼镜,虽然可以测量位姿变化,但是没有办法获得更准确的深度信息,也不能构建房间的3D地图,所以这个技术一般不会被产品采用。目前的产品呢,主要会采用第二类,也就是深度相机,顾名思义就是能够获取深度信息的相机,可以构建房间的3D地图。
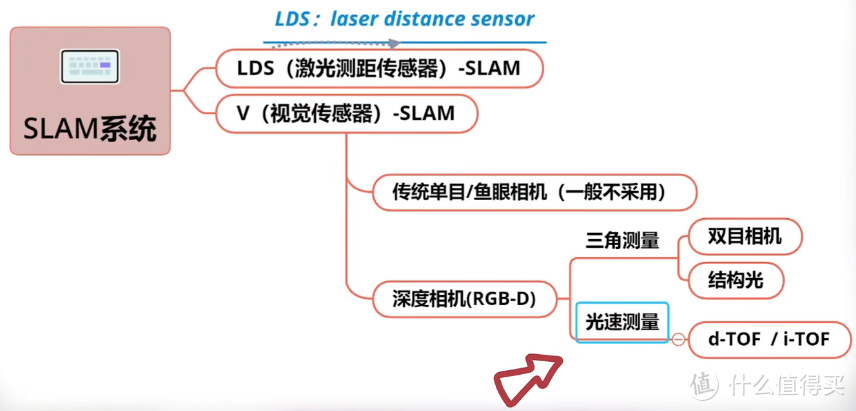
那总体来说呢,有两种技术方案,第一种是基于三角测量,有双目和结构光两种实现办法。双目相机利用双目测距原理,已知两个相机的基线焦距,再通过复杂的算法获得两个成像中比较容易识别跟匹配的特征点来计算出视差,这样就能推算出物体跟相机的距离。这个方案原理简单,但实现起来相当复杂。因为要从像素级别处理图像,寻找并匹配特征点,需要非常复杂的算法及大量的运算资源,对cpu跟gpu的要求都比较高。

为了解决双目相机的弱点,结构光技术应运而生。如果双目相机是图片转文字,它的效率跟准确度都堪忧,那么结构光就好比是识别二维码,它能快速准确地获取信息。结构光技术通过投射具有一定结构的图案,让摄像机可以快速识别匹配特征点,然后求解光源,摄像机跟特征点组成的三角形就能快速计算出特征点的深度。以上两种基于三角测量的基础。方案,他们的测量精度会随着测量距离平方下降,因此更适用于近距离场景,而且对环境有要求。双目相机怕黑,结构光相机怕太亮。深度相机的第二种方案就能解决上述问题,利用光速来测量:主要采用time of light技术。
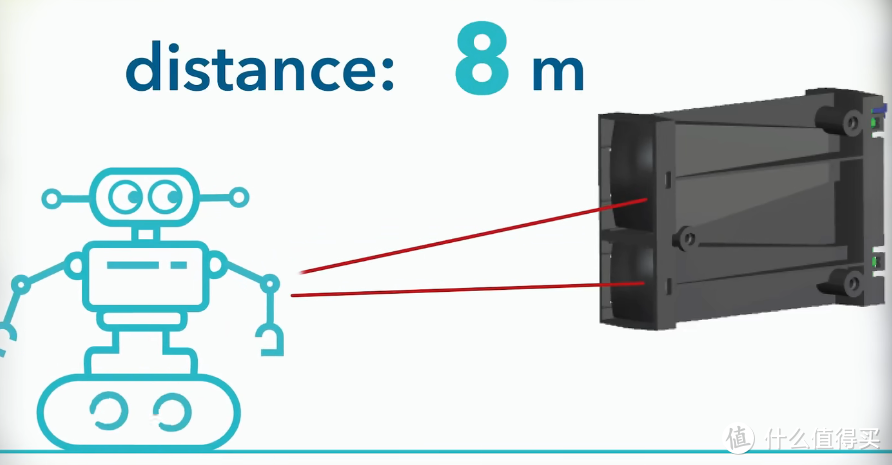
核心原理非常简单,光源发出测量光线,障碍物将光线漫反射回摄像机,有了这个时间差,再代入光速就可以测量出深度。说起来简单,但是由于光速太快了,工程师们各显神通,发展出了多个技术路线,比如D-TOF、I-TOF,这里就不细说了。TOF由于硬件成本高,像素往往较少,它的成像精度不如结构光技术,但是由于它受环境光的影响较弱,而且误差稳定,所以更适合中远距离的场景。
综上,我先给大家总结了LDS-SLAM和V-SLAM的优缺点如下 ↓ ↓ ↓
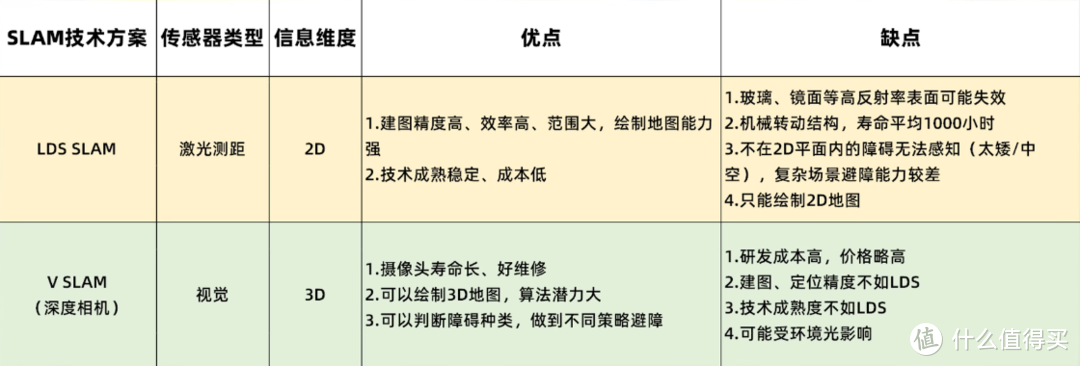 LDS-SLAM和V-SLAM的优缺点
LDS-SLAM和V-SLAM的优缺点
总之硬件能直接获取的信息丰富越准确,软件的建模效果越好,SLAM系统的潜力也就越大。从这个角度上来说,采用深度相机的V-SLAM好于LDS-SLAM,深度相机三种技术路线各自的特点我也给大家总结好了↓ ↓ ↓
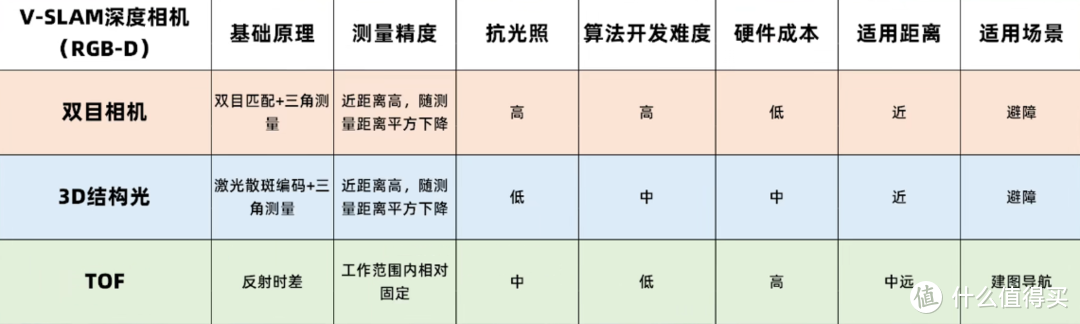 V-SLAM特点
V-SLAM特点
大家再看产品参数的时候,结合以上内容就能判断出哪一台扫地机器人是真的聪明。
额外要注意的是,多传感器结合是扫地机器人发展的趋势,合理地使用多个传感器,互相取长补短,那它的效果肯定是要优于只使用一个传感器的。所以就目前的产品SLAM系统来看,我的推荐购买顺序如下:DTOF+3D结构光>LDS+3D结构光>LDS+双目相机>LDS>DTOF>双目相机。
以上内容呢,是针对前端硬件的科普,后端全局优化。算法的效果跟质量很难给大家评估,但是我知道开发优秀的人工智能算法往往需要大量的资金支持和海量的用户数据,所以选择头部企业的产品总是没错的(下篇会介绍~)
那关于SLAM导航系统的内容就是以上啦,剩余配置、功能和品牌推荐的部分,会放到扫地机器人篇(下),敬请期待哦!
















