





















































































333
94
当纯视觉遇到大雾天,会抓瞎吗?
2024-10-06 12:21:36
1点赞
2收藏
4评论
如果真的是纯纯的,特头铁的那种纯视觉方案的话。
可以简单粗暴的理解为:人眼不行的,机器也不行。

但是,现下,应该还没有如此100%纯度的纯视觉。
即便头铁如特斯拉,虽然取消的了雷达和超声波传感器。
但是在视觉传感器上疯狂做假发,而且依然保留的一定的冗余,来补上视觉的局限。
更准确的说,不应该叫纯视觉,而应该叫视觉优先。
这样,在大雾天。如果非得开,还能开一开。
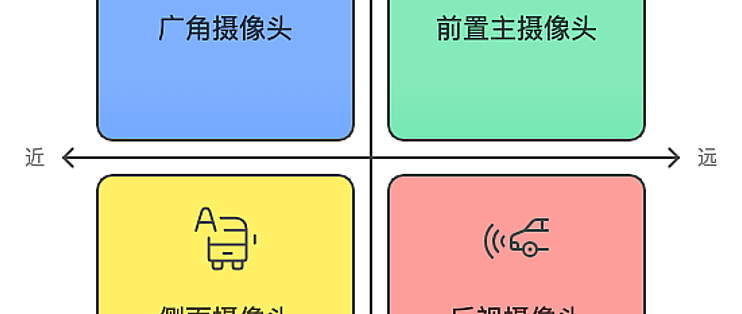
优先级最大的摄像头系统,料堆得最满。
前置主摄像头:
负责捕捉前方远距离的视野,识别车辆、道路标志和路况。
广角摄像头:
捕捉前方的广角视野,尤其适合识别近距离的物体,比如停靠车辆和交叉路口的动态情况。
侧面摄像头:
布置在车辆两侧,用于监控车道变换、盲区检测和周围车辆的动态。
后视摄像头:
负责监控车辆后方的状况,辅助倒车以及识别后方来车。
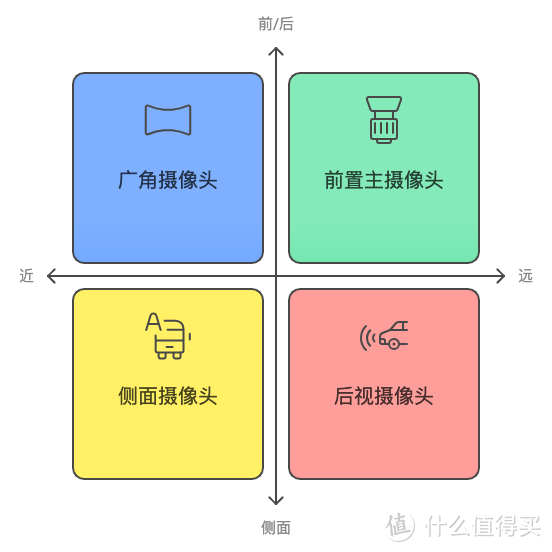
基本上,覆盖了所有该看的地方和角度。
然后,在某些瞬间失明或者视力下降的时候,还有一些传感能够暂时提供参考信息。
GPS和高精度地图(GPS & High-Precision Maps):
GPS结合高精度地图数据,车辆能够确定自己的定位,识别出所在道路的限速、地形和路线结构。
惯性测量单元(IMU):
用来感知车辆的姿态、加速度和转向等信息。
这些数据帮助车辆在复杂的驾驶条件下保持平衡,并提供精确的动态反馈。
视觉优先,其实也更接近人类驾驶是的感知-规划-决策-执行的模式。
人虽然大部分的信息摄入来自于眼睛。
但是对于行动的决策判断,还有耳朵听到的,身体发肤感受到的,以及莫名其妙的第六感。
综合起来构筑起一个立体的信息。

视觉优先,今后的路应该不是走摄像头这一根独木桥。
应该是如何接近
更像一个人的感知系统
把视觉之外的,哪些信息。
尽量通过不做加法的方式,给逆向仿生出来。
也许,有一天AI真的可以把驾驶这件事也给“暴力破解”了吧。
作者声明本文无利益相关,欢迎值友理性交流,和谐讨论~












martinlock
摄像头的硬件上限在那,极端条件下的低景深,高反差,瞬间明暗变化等远远超出它的能力。
它可以应对99%以上的场景,但极端条件下永远也做不到
校验提示文案
骸客地瓜
校验提示文案
Jeremy哥哥
校验提示文案
shenpeng1975
校验提示文案
骸客地瓜
校验提示文案
shenpeng1975
校验提示文案
martinlock
摄像头的硬件上限在那,极端条件下的低景深,高反差,瞬间明暗变化等远远超出它的能力。
它可以应对99%以上的场景,但极端条件下永远也做不到
校验提示文案
Jeremy哥哥
校验提示文案