






















































































312
127
魏牌城市 NOH 内测曝光,其采用的「重感知」技术路线会是智能驾驶的最终选择吗?
2023-02-09 21:29:52
5点赞
2收藏
10评论
目前城市辅助驾驶系统交了作业的几家厂商,真正比实绩的话,魏牌城市NOH系统与小鹏城市NGP都算是勇猛,是第一梯队的先锋军。
为什么?因为城市智能驾驶并不容易!从小鹏和魏牌发布的路测视频来看,智驾实力算是行业前沿水平了。
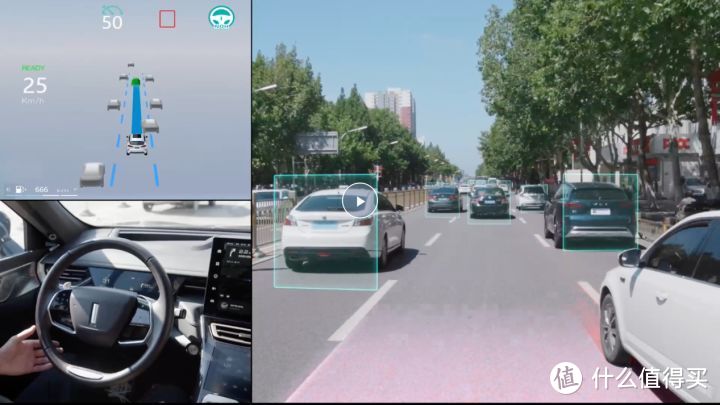

辅助驾驶在比较平直的高速行驶的时候识别和算法都比较轻松,但如果在城市形式情况就复杂的多,有加塞插队的,有修路的,还有到处停的电动车和到处跑的电动车。从魏牌城市NOH高管内测视频及媒体内测视频来看,这款摩卡DHT-PHEV激光雷达版就是针对城市复杂路况设计的。
其实这几年关于城市辅助驾驶的声音特别多,但是真的落地的却很少见。就像乔心昱说的,城市级别的领航辅助驾驶之所以不见踪影是因为:路况难、审批难,开通难,就属“割韭菜”不难,年年喊上车,季季说开通,始终是雷声大雨点小。伴随城市NOH落地,魏牌还原了真正智能技术该有的样子,拒绝“期货”技术和假把式。
从城市辅助驾驶流派来说,之前主要是两派争论,一个是以特斯拉为代表的“纯视觉”派;另外一派是主流的融合感知路线,其中又有以小鹏汽车等汽车厂商使用的“重度依赖高精地图”路线以及魏牌所提出的“重感知”路线。

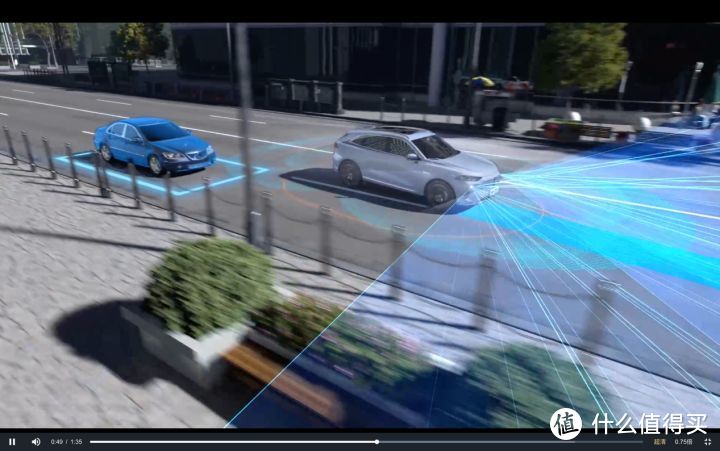
关于小鹏等车企提出的“高精地图”路线一直有不少争议。特斯拉CEO埃隆·马斯克多次表示 “高精地图是一个‘很糟糕的想法’,会导致自动驾驶系统过于依赖已存储的高精地图而失去灵活性,不能像真正的司机那样根据路况灵活应变。”除此之外,还有政策审批的要求等。另一流派的魏牌等企业提出了“重感知”的路线方案,不过度依赖高精地图,可实现短时间大范围城市覆盖。
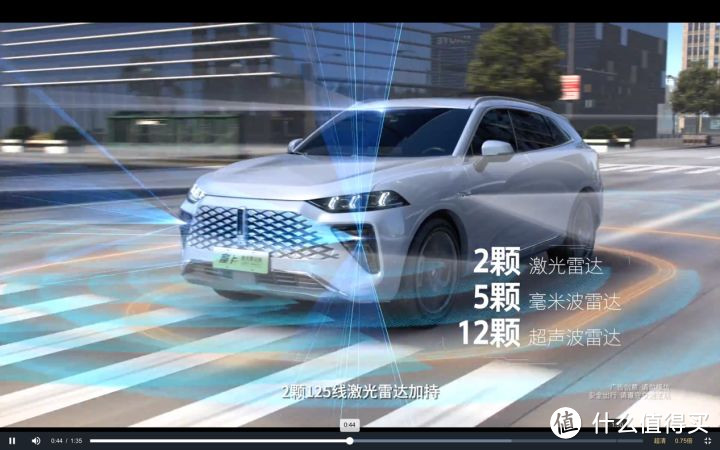
而要提高感知能力,也意味着车辆上需要搭载更多的激光雷达。真要秀肌肉的话,魏牌摩卡DHT-PHEV激光雷达版一共有31个感知组件,激光雷达+毫米波雷达+超声波雷达+摄像头,四位一体,从数据上来看无论是质量还是数量都明显领先于当下的主流辅助驾驶车型。
在这具体列举下配置:
配备2颗125线激光雷达;
5颗毫米波雷达;
12颗超声波雷达;
4颗百万级像素环视摄像头;
4颗百万级像素侧视摄像头;
4颗800万像素感知摄像头。

在算力方面,城市NOH搭载高通Snapdragon Ride平台下首发5nm高通骁龙8540+7nm高通骁龙9000方案,算力达到360TOPS,是业内第一个高通Snapdragon Ride平台量产产品。
在算法方面,魏牌构建智能数据体系MANA(雪湖),并把Transformer 算法引入到其数据智能体系 MANA 中,区别于传统的基于循环神经网络 RNN架构的序列算法,Transformer采用注意力机制,Transformer 算法在底层融合视觉和激光雷达数据,进而实现空间、时间、传感器三位一体的深层次感知。
总体来看,在硬件配置、算力支持和数据算法上,城市NOH都具备很强的实力,这种技术架构相比纯视觉和重地图的方案也显得更加可靠,所以估计将来会有更多车企选择与之类似的技术解决方案。
就城市辅助驾驶系统来看,魏牌摩卡DHT-PHEV激光雷达版是全方位的优秀,但是作为一个用户还是衷心希望各家厂商都能卷起来,毕竟一家独大没意思,百家争鸣不断创新才是我这个普通用户乐见的。
















是朕啊
校验提示文案
值友3725270846
校验提示文案
aben0007
校验提示文案
江北jiangb
校验提示文案
言言的言
校验提示文案
言言的言
校验提示文案
aben0007
校验提示文案
值友3725270846
校验提示文案
江北jiangb
校验提示文案
是朕啊
校验提示文案