



























































































252
215
汽车,这么就横着走了?
2024-03-18 21:57:13
1点赞
3收藏
2评论
智己又一次的控制不住自己了。
L6上了“螃蟹步”功能,能横着走。
可实现x、y、z方向6个自由度(前后、左右、上下)协同的主动管理控制
这是电动化之后,对驱动单元可以充分解耦后带来的一个降维解题方式。

四个轮子可以毫无顾忌的各自干各自的了。
不用照顾其他轮子的情绪。包产到户了。
所爆发的生产力确实挺惊人的。
所产生化学反应可能性和实用性也高很多。
但是需要一个会做菜的大厨。
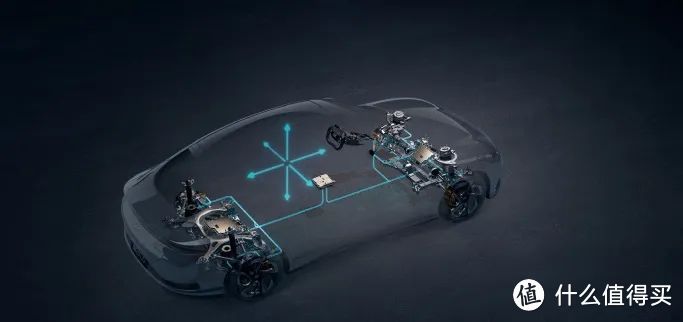
“横着”走就是其中一个。四轮对向的差速,是能够实现横着走的。
如果能够深度挖掘的话,原本在通过机械连接的四轮上相对难实现的事情,在四轮独立运作的电车上,会有很多的想想空间。
·高速入弯,用电子LSD变得更稳(甚至不用后轮转向)
·低速大角度转弯,可以像小车一样灵活
·竞技驾驶,可以主动控制轴荷

黑科技的黑,在于比宣传的还残暴。
是比预期的还牛逼。
不知道L6上做到了多少。
现在是汽车的一共工程领域应用的大爆发时代。
对于黑科技,永远都是期待的。
不知道谁能一黑到底。
作者声明本文无利益相关,欢迎值友理性交流,和谐讨论~
















wb5244
校验提示文案
Jacky君
校验提示文案
Jacky君
校验提示文案
wb5244
校验提示文案