











































































348
340
清洁电器 篇三十四:2024年4000价位扫地机器人怎么选|追觅S30 Pro Ultra、石头P10S Pro、科沃斯T30 Pro超级横评
2024-05-09 22:46:36
2点赞
14收藏
4评论
一、缘起
大家好,我是Z先生,专注清洁电器测评。清洁电器中,设计最为复杂、软硬件高度结合、更新迭代最快的,非扫地机器人莫属,相关测评也是我最为侧重的,目前经手测试和体验过的机型已远超百余款。对于扫地机器人行业变化,我也保持紧密关注,并在站内分享大量攻略和心得。今年年初我将扫地机器人行业变化趋势、选购要点,结合本人多年来的使用测评经验,汇总成一篇扫地机器人综合避坑指南,获得大量值友的认可:
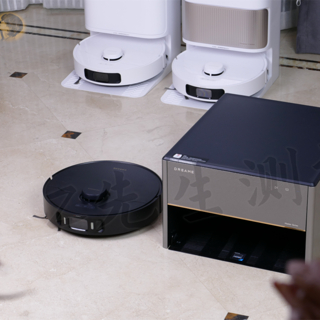
时间进入2024年二季度,各大品牌纷纷推出新款,完成了年内首轮『交锋』。从升级方向看,扫地机器人的感知能力进一步升级,随着『仿生』概念的引入,今年新款机型的扫拖覆盖率更高、清洁能力更强,同时维护更加便利、定制化内容更丰富。本文挑选今年初面世的3款4000价位热门机型并做超级横评,3款机型分别是石头P10S Pro、追觅S30 Pro Ultra、科沃斯T30 Pro。

既然标题大言不惭冠以超级横评几个字,本文的篇幅和深度也将远超其他测评,宗旨是令读者看到3款机型的性能全貌。我相信大家或多或少有类似疑问,比如
什么是机械臂、不同机型的机械臂外延算法和清洁效果一样吗?
各家都号称零缠绕滚刷到底有没有水分?
几款机型避障到底是什么水平?经不经得起考验?
其他还有什么升级?
·······
遍历网上的测评,大多避重就轻,很难找到你想要的答案。
为大家提供专业的测评和意见,就是本文的缘起。
本文系作者原创,已经同步至本人公众号(Z先生测评),未经授权不接受任何形式的转载、洗稿!
二、快速推荐
考虑到本文篇幅的问题,想快速得到结论的朋友可参考本章节『快速推荐』的结论。对某方面性能感兴趣的朋友,也可以下拉目录直接定位阅读。
下表是3款机型的主打功能(标红是优势项目),大家可以先有个概念:

1、追觅S30 Pro Ultra
追觅S30PU经实测在清洁覆盖率、清洁力、智能交互、维护性等多方面保持优势。其主要优点包括:
边刷机械臂遇边角、缝隙可外延,时长充分,提高垃圾回收率;
拖布机械臂遇缝隙可外延+动态甩尾,针对桌椅腿升级拖布持续绕行摆尾,降低漏拖区域;
扫地全区域(弓字、边缘、边角)垃圾回收率高。拖地可『指哪儿拖哪儿』,主动识别脏污并深度区域,升级5光谱脏污检测判断脏污准确,重污清洁表现好;
边刷、中滚刷、拖布三升降,避免交叉污染;
避障高配,单线激光+RGB摄像头+LED补光,对高/中/低障碍物、落地镜、展开数据线、暗光环境均发挥稳定;
边刷(偏距圆设计)和主刷(主动切割毛发)长期使用毛发零缠绕。基座清洁盘双刮条可自动清洁基座底部;
升级版语音助手,可实现家具图谱、多轮对话、理解复杂参数、加扫等;路径规划面对突发状况,响应时效快、决策迅速;
app自带宠物模式,参数可高度客制化;
22mm越障,高于行业平均20mm;
有视频管家功能
机器可改进的点包括:
增强针对窄边角(见下文)的边刷外延算法,进一步提高回收率;
地毯清洁补齐策略;
保证清洁力的前提下,尝试优化清洁时长;
综上,追觅S30PU的综合性能优势最明显,也是三款中价格最高的(4299)。机器适合预算ok,对清洁能力、智能交互有较高要求,希望极大程度解放双手、降低维护工作的用户,或者养宠家庭。
2、石头P10S Pro

石头P10S Pro的硬件配置仅次于追觅,其主要优点包括:
配置边刷+拖布双机械臂,边刷机械臂提升边角回收率;
侧重清洁时效,在全屋清洁中耗时最短;
地毯清洁提供4种策略,较为完备;
避障配置高,单线结构光+RGB摄像头+LED补光,实测避障以安全优先,距离障碍物较远;
清洁盘整体可取下,脏污不进入下一层基座底部,打理方便;
有语音助手功能,可执行一般命令以及召唤清扫;
有视频管家功能,可一键寻宠;
app有宠物模式;
主要的不足包括:
边刷机械臂外延算法有改进空间,实测边刷外延时间较短易发生边角漏扫、遇到缝隙边刷外延失败;
多次清洁仅第一次沿边,之后直接走弓字,导致边缘处有漏扫的风险;
桌椅腿清洁时,拖布机械臂绕行距离较远,漏拖面积较多;
风干老抽测试中,完成清洁耗费的次数最多,清洁力偏弱,且区域复拖触发失败;
扫拖模式下边刷易发生交叉污染;
避障算法异常保守,虽然比较安全,但是距离障碍物太远(低矮障碍物)导致大面积漏扫;
双胶刷防缠效果普通,实测两端有大量毛发缠绕,依旧有不少清理工作;
语音助手无法理解复杂语义,指令相对较少;
路径规划测试中,面对一些突发场景决策偏犹豫;
石头P10S Pro的价位为3999,适合预算卡死在4000内、家庭环境本身较为整洁、地面障碍物较少、更关注扫地性能的用户。
3、科沃斯T30 Pro

科沃斯T30 Pro的硬件配置和前两款机型相比并不占优势。其主要优点包括:
拖布单机械臂,可持续保持外扩状态,提升缝隙覆盖率,对于内角清洁也有不错的细节算法;
持续外扩的拖布在桌椅腿测试中有一定优势,拖布绕行距离椅子腿较近,漏拖面积较少;
对于袜子、团装数据线等低矮障碍物避障效果好,紧贴障碍物绕行、不卷入障碍物;
有语音助手功能;
有脚触控制,用脚轻触撞板可启动清洁任务;
拖布有单独的甩干过程,自动集尘从一次分成连续间隔两次,降低噪音体感;
其不足包括:
和另两款机器相比缺少边刷机械臂,对于边角、缝隙的垃圾无能为力;
多次清洁仅第一次沿边,之后直接弓字,边缘处可能有垃圾残留;
扫拖模式下边刷、滚刷易发生交叉污染;
官宣的复洗复拖并未上线,要等之后OTA;
避障测试表现不稳定,对于展开数据线发生缠死;
双梳齿防缠绕效果有待提升,实测在主刷两端和中间依旧有毛发缠绕;
基站清洁盘滤网下方容易积累污水,造成局部潮湿环境;
语音助手可接受指令较少;
路径规划测试中,总体表现偏犹豫,在一些突发场景中做决策耗时较久;
科沃斯的售价为3999,适合预算卡死在此价位、对扫地和智能交互不太在意,偏重拖地的用户
三、性能实测
这部分内容将详细测试对比三款机型的清洁覆盖率、清洁力、避障、维护性、智能交互、路径规划等6方面性能。
1、清洁覆盖率
3款机器主打的边刷、拖布机械臂的算法区别、带来实际清洁效果和对覆盖率的提升,是本章节测试的重点。另外,我还将进行低矮空间通过情况、桌椅腿清洁、越障等方面测试。
「1、矮柜底部通过
扫地机器人机身高度和相关算法,决定了沙发、床等低矮区域的清洁覆盖率。
三台机器的机身高度分别为科沃斯10.4cm、追觅10.38cm、石头10.3cm,高度逐次降低。实测对于10.8cm的矮柜底部,3台机器均能正常进出,没有出现无故绕开的情况。

「2、边刷机械臂
本次测评的三款机型中,追觅和石头的边刷配置了机械臂,是核心升级,科沃斯无此配置。本小节将着重测试追觅和石头的边刷外延算法和实际表现有无区别,以及相较无此功能的科沃斯有什么优势。

· 边刷设计差异
首先我们发现,追觅和石头边刷设计就有差别:追觅边刷三根刷毛均能前后自由浮动、且尼龙刷毛部分比较长,更有利于摆脱被缠住的毛发;石头边刷无特别设计,边刷一体化、尼龙刷毛部分相对较短。

· 内角大米回收
边刷机械臂的工作逻辑并不复杂,当机器在沿边前进时,检测到边角,自动伸出边刷、停留、收回,继续清洁。
我们直接对比三款机型面对边角大米的回收情况,见下图(统一2倍速)。
 2倍速
2倍速我们看到,即便都是边刷机械臂,追觅和石头的逻辑和实际表现也是有差别的:
追觅的边刷外延的时间更长,为击打出边角的大米留出充分时间,大米全被击打出被回收无残留;
石头的边刷伸出时间相对较短,导致部分大米未被击打出来机械臂就收回了,大米有残留;
科沃斯边刷无机械臂,对边角的大米完全无能为力;
本测试可以看出,追觅更侧重边角清洁效果,确保回收率的前提下牺牲一定清洁时长;石头在清洁时效和清洁力之间偏重前者,边刷伸出时间较短,边角垃圾有漏扫风险;科沃斯由于无边刷机械臂,完全无法清洁到边角。
· 缝隙清洁逻辑
再来看常见的家具底部缝隙清洁,追觅和石头均能在app开启该功能。
但是实际测试下来(下图),追觅边刷遇到缝隙正常外延、石头的边刷却无法正常外延,测试几次皆是如此。
总结一下边刷机械臂性能:追觅边刷外延逻辑更合理,以边角回收率优先,对于缝隙也能正常外延;石头边刷外延时间偏短,有发生漏扫的概率,遇到缝隙也有不外延的问题,需优化算法;科沃斯没有边刷机械臂,无法清洁到边角的垃圾。
「3、拖布机械臂
看完边刷机械臂,再测试拖布机械臂。
拖布外延有哪些不同的形态,见下图:
我们看到:
追觅拖布遇到边缘正常外延、遇到缝隙可开启拖布外延+动态甩尾;
石头拖布遇到边缘正常外延;
科沃斯可开启拖布恒贴边,拖布持续保持外延姿态,对于缝隙、桌椅腿清洁是个优势;
那么遇到边角,每家的拖布机械臂外延逻辑是否相同呢?
答案是否定的。
下图可见追觅和科沃斯,在90°转向后,拖布先外延、再后退停留、再前进,以确保拖布最大程度清洁到内角,覆盖率相对更高;石头则是转向90°拖布外延后直接前进,并无后退一步,拖地覆盖率没有前两者高,但速度更快。
 一倍速
一倍速上图还能观察到,石头和追觅由于边刷机械臂外延,清洁内角的耗时比科沃斯长;追觅由于边刷外延停留时间更长,加上拖布外延后退再前进,清洁耗时比石头长。
总的来说,以拖布机械臂覆盖率来看,追觅可处理缝隙、内角转向也有细化路径,总的覆盖率较高;科沃斯内角转向算法和追觅一样,遇到桌椅腿等家具清洁拖布恒贴边也有优势,覆盖率仅次于追觅;石头内角清洁拖布无细化算法,也没有针对缝隙特别处理,覆盖率第三。
「4、多次清洁是否沿边
这是绝大多数测评不会考量的。
早期扫地机器人多次清洁时(清洁次数=2或3),都是老老实实先沿边再弓字。之后部分机型多次清洁仅第一次沿边,第二次清洁直接先走弓字不沿边。这样做清洁『效率』的确更高,但只要第一遍清洁时垃圾被击打到边缘,第二次就无法清洁到,容易导致边缘处漏扫。
下图可见,追觅多次清洁每次都是先沿边后弓字,石头和科沃斯则是仅第一遍清洁沿边,之后都直接弓字。
这也是后续测试中,石头和科沃斯在边缘处可能有垃圾遗漏的原因之一。
「5、椅子腿清洁测试
继续测试家中常见的椅子腿清洁效果:在椅子腿周边密集撒上一圈黑米,机器打开扫拖模式、机械臂,设置区域清洁2次。着重测试:
黑米回收情况,理想状态下4个角的黑米被边刷或拖布击打出来,再被回收掉;
观察边刷和拖布机械臂环绕桌椅腿的覆盖率;

先来看追觅的表现,可以看到追觅在第一遍清洁就将4个脚的黑米几乎全部击打出来并部分回收,对于每个脚的黑米边击打边绕行回收。第二遍查漏补缺,最终黑米几乎全部回收,仅2~3粒黑米残留。

细节上,追觅拖布机械臂桌椅腿清洁升级为2.0:具体表现为边刷绕行时转速加快,机器绕行椅子腿时,拖布机械臂外延并不断持续『扭屁股』回探以贴近椅子腿,确保拖布以最大限度环绕椅子腿周围,漏扫和漏拖面积较低。

石头虽然伸出了边刷和拖布,但实际清洁效果不佳,有大量黑米残留:远端那条腿残留较多黑米未被击打出来,椅子中间区域有大量黑米残留未被回收。

细节上,石头清洁时拖布机械臂虽正常外延,但拖布绕行时距离椅子腿有一段距离,椅子腿周边一圈拖布无法拖到:
最后来看科沃斯,科沃斯拖布恒定外延,总体回收率还不错。只是有少了黑米被击打到远端边缘处未被清理到,主要原因是上文提到的科沃斯多次清洁仅第一次沿边,边缘清洁有点吃亏。

细节上,我们看到科沃斯的拖布绕行椅子腿时,也有一小圈距离拖不到,不过环绕距离比石头更近。

总结一下,综合桌椅腿清洁效果、绕行策略等方面表现,追觅表现最好,科沃斯次之,石头需要改进最多。
「6、越障
越障性能也会影响清洁覆盖率:越障哪怕强一点点,可能进入的区域就越多,理论上可覆盖更多区域清扫。
绝大多数扫地机器人的官宣越障高度都是2cm,这次测评机型中追觅的官宣越障高度为2.2cm。取出铁质地垫(左右两侧高度2cm,中间高度约为2.2cm),选择扫拖模式,测试3款机型的越障性能。
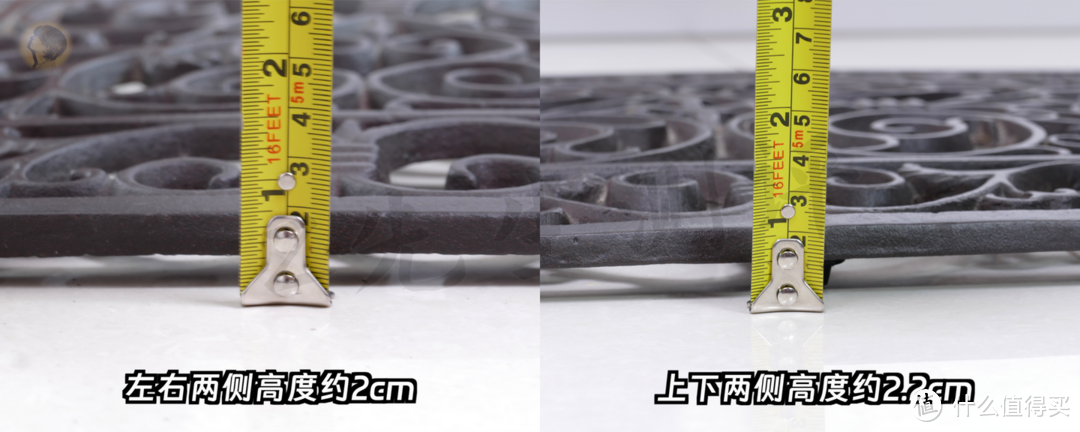
下图可见,扫地机器人在扫拖模式下(拖布放下)越障性能或多或少会受到影响。其中追觅在地垫下方2.2cm实现翻越,左右两侧2cm越障没有问题;石头在下方2.2cm处有点犹豫就下去了,左右两侧2cm高度也是越了一半就下来;科沃斯全程都有点犹豫,左侧2cm处勉强小幅翻越,上下2.2cm处多次试探均放弃翻越。

从越障能力看,追觅官宣的2.2cm不虚,强于石头和科沃斯。
好了,关于清洁覆盖率的测试就到这里,每部分结果总结至下图(标红代表有优势),可见追觅在覆盖率的综合优势最大,科沃斯表现次之。

2、清洁力
接下来我们来测试3款机器的清洁性能。
「1、扫地性能
· 黄豆回收
地面投放黄豆(着重在清洁区域3个角落投放黄豆),机器选择单扫、标准吸力、清洁2遍,打开边刷机械臂。观察黄豆回收、边刷击飞垃圾、边角黄豆残留等情况。
 3个角落投放黄豆
3个角落投放黄豆我们先来看追觅,追觅总体表现较好,2遍清洁均沿边+弓字,弓字区域、边缘处均无黄豆残留。

三个角落均正常触发边刷外延,其中角落1、角落2的黄豆全被击打出来并回收掉,无残留。角落3是一个小的窄边角,机器停留时间较短,有少量黄豆残留。这样小边角的清洁,边刷机械臂的算法可以再提升一下。
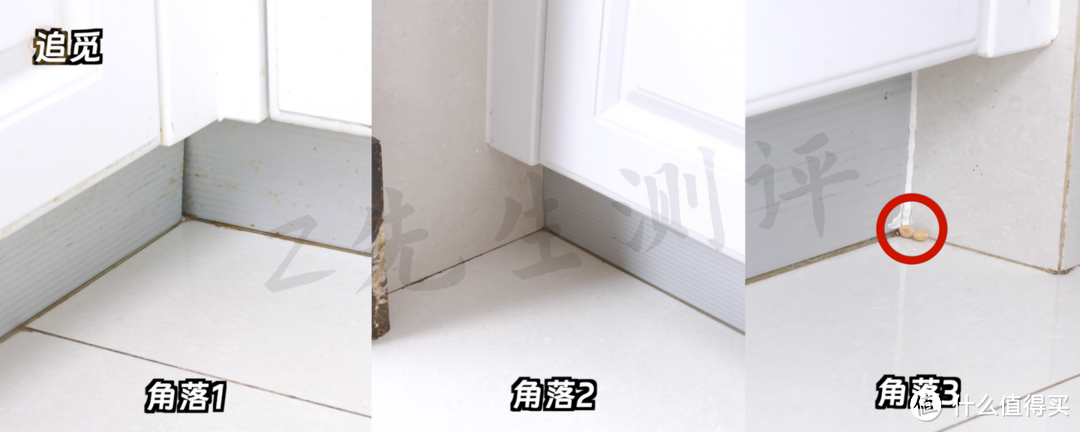
我们观察到,追觅在边角处的停留时间较为充分(2倍速):

再来看石头,2遍之后弓字区域没有黄豆残留:
但在3个角落,均有黄豆残留。特别在角落3这样的小内角,机器几乎没有停留,漏扫较多。另外,在角落2附近边缘处,也有黄豆残留(下图红圈):

注意石头在每个边角停留时长,同样是2倍速,和追觅相比边刷伸出停留时间偏短:
最后来看科沃斯,科沃斯弓字区域黄豆全部回收:

不过由于没有边刷机械臂,和前两款机型相比,角落的黄豆完全无法触及到,全部残留:

总结一下,综合弓字区域、边缘、角落的黄豆回收率来看,扫地性能追觅最强、石头次之,科沃斯边角清洁较弱。
「2、扫拖性能
· 风干老抽清洁
地面投放5ml风干老抽,机器选择智能托管/AI模式,进行区域清扫(厨房),关注以下4方面的表现:
每台机器需要清洁几遍才能完成任务;
检验复洗复拖(或复拖)功能;
检验边刷、主刷等交叉污染情况;
检验高温洗拖布效果;
先看追觅。追觅仅耗费3遍弓字就将老抽完全清洁干净,清洁效率最高。第一遍沿边弓字清洁完毕后自动进行拖布复洗和区域二次清洁,故第二遍弓字清洁是自动完成的,两遍之后老抽几乎已经被清洁干净,仅少量残留。第三遍弓字清洁后,完全清洁干净。

追觅的清洁效率高,其中一个重要原因是重污的定点清洁。下面左图可见,当追觅的RGB摄像头主动识别到污渍后,机器降速、边刷和中滚刷抬升,对脏污区域进行深度拖地,提升了每一次重污清洁的强度。下面右图可见,机器在老抽测试中开启该功能,大幅提升了重污清洁能力。
主动识别家庭环境中脏污区域,哪儿脏清洁哪儿,不脏的区域降低清洁强度,是我认为扫地机器人真正应该有的形态。希望追觅继续将这方面的功能精进和完善,令机器人可以像人类一样思考,拥有真正的『仿生』能力。
再来看石头,具体见下图:
从清洁次数上,石头共消耗3遍井字+(6遍弓字+)才能清洁完区域,三遍井字后中间区域还残留了一丢丢没有清洁干净,清洁效率偏低;
三遍清洁均为手动开启智能托管,均未触发区域复拖,比较奇怪,基站判断污水是否浑浊的阈值较高;
在智能托管模式下机器自动设定扫拖参数,但观察下来机器行进速度偏快,行进路径也较为疏松;
最后来看科沃斯:
花费5遍弓字(3遍弓字+1遍井字)将老抽清洁干净,机器路径较为密集,清洁效率介于追觅和石头之间;
前文提到,科沃斯宣传的复洗复拖功能还未正式上线,需要等之后的OTA升级,故测试时无法自动复拖,每次需要人工在app设定

总结一下风干老抽清洁次数,追觅3遍弓字、科沃斯5遍弓字、石头6遍弓字,清洁效率依次递减。复洗复拖方面,追觅是唯一成功触发复洗复拖的,人工操控介入最少;石头未触发区域复拖;科沃斯该功能暂未上线,自然也无法区域复拖。
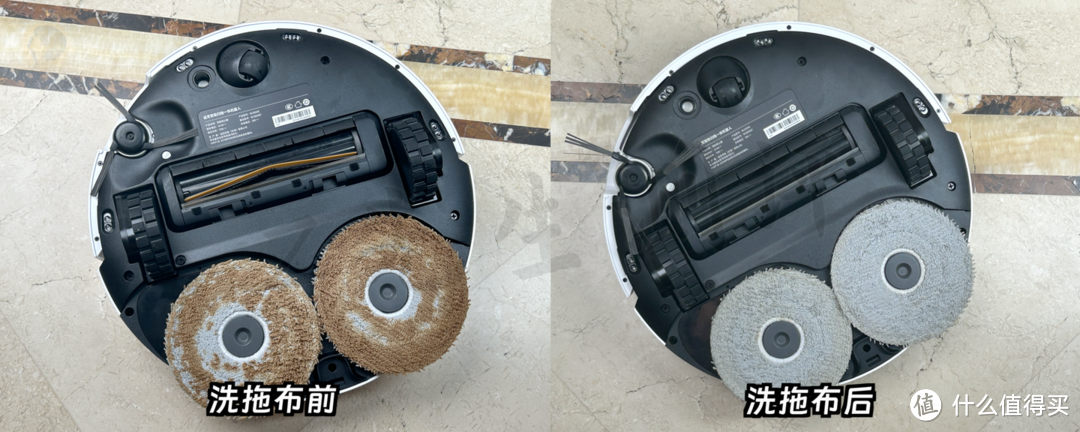
· 高温洗拖布、扫拖交叉污染
3台机器都有高温洗拖布功能,可以尽可能地剥离污渍,避免脏污布执行污染。对于4000价位的机型,高温洗拖布已经成为标配。
在老抽测试过程中,随机打断高温洗拖布过程,录得清洁盘水温至少在40°~50°+之间(由于高温洗是一个过程,一般有2~3个温度峰值,上述数据仅做参考)。另外,石头和追觅 app可设置洗拖布温度,石头有4个档位,追觅有3个档位,自由度更高。科沃斯无法选择温度档位。

再来对比高温洗拖布前后的差异、以及在老抽测试中交叉污染的情况。
总的来说,3台机器的高温洗拖布的效果都还不错,仅凭观察无法区分差异度。
追觅由于在老抽清洁时,持续触发重污定点清洁,边刷、中滚刷、拖布三抬升,边刷和滚刷较少附着老抽,几乎无交叉污染。
当追觅回充时,同样边刷、中滚刷、拖布三抬升,相较另两台机器至少多了边刷抬升,交叉污染更低。

石头的交叉污染主要发生在边刷:边刷无法抬升导致在清洁时附着大量老抽,同时也污染了主刷罩(下面左图)。当机器回充时,虽然边刷不抬升,但中滚刷和拖布双抬升,一定程度降低交叉污染。

科沃斯仅有拖布单抬升。当老抽清洁时 ,边刷刷毛附着老抽、主刷选择时主体和刷毛上也附着不少老抽(下面左图)。相对来说,科沃斯的交叉污染比较严重。

总的来说,面对重污清洁,追觅完成清洁的次数最低、人工介入程度最低、交叉污染最少。主动识别污渍并采用深度清洁策略、边刷/滚刷/拖布三升降,保障了清洁性能,是追觅独有的优势;石头和科沃斯的清洁次数更多,触发复拖的条件更苛刻,也有不同程度的交叉污染问题。
· 全屋清洁(智能托管模式)
智能托管模式下进行全屋清洁,观察清洁时效、面积、洗拖布和集尘次数。
下图可见,石头全屋清洁67分钟、清洁面积47㎡,清洁效率最高;科沃斯花费时间一样,清洁面积略低为45㎡,但不显示洗拖布次数;追觅由于机械臂外延的停留时间偏久,整体清洁时间较长、洗拖布次数和集尘次数也是3款中最高的,清洁耗时80分钟、清洁面积44㎡。

· 地毯清洁
对比3台机器的地毯清洁策略。注意,目前中等价位以上的主流扫地机器人,超声波地毯传感器和拖布抬升基本是标配,机器至少可以拖布抬升上地毯清洁。
本次测评3台机器的地毯清洁策略各不相同,其中石头和追觅的策略相对丰富。石头比追觅还多一项穿越地毯的选项,对于房间门口有地毯的家庭比较友好。相比之下,科沃斯的地毯策略相对较少。

三台机器的实测结果如下:追觅优势最大,在扫地回收率、重污清洁能力等测试中表现稳定,主动识别脏污、智能复洗复拖、边刷滚刷拖布三升降,均围绕清洁力和智能性展开;石头地毯清洁策略较为丰富,清洁力方面更倾向清洁效率,优点是清洁时长较短,不足是容易发生漏扫,拖地绝对性能也较为普通;科沃斯清洁能力位列中间,其中重污清洁效果尚可,在交叉污染、地毯策略等方面不占优势。

3、避障
「1、硬件配置
三款机器的避障配置都在平均水平之上,追觅和石头配置类似,均为单线激光(或结构光)+RGB摄像头+LED补光,科沃斯配置为单3D结构光。
追觅之前机型的避障配置多以双线激光为基础,这次变成单线激光,着重观察避障性能是否有变化。
石头自P系列开始,均使用单向结构光避障(本质也是激光),这次的P10S Pro也是一样,区别是RGB摄像头识别的障碍物数量有差异。

科沃斯延续了T系列的3D结构光,未配置RGB摄像头,自然也无需配置补光灯。

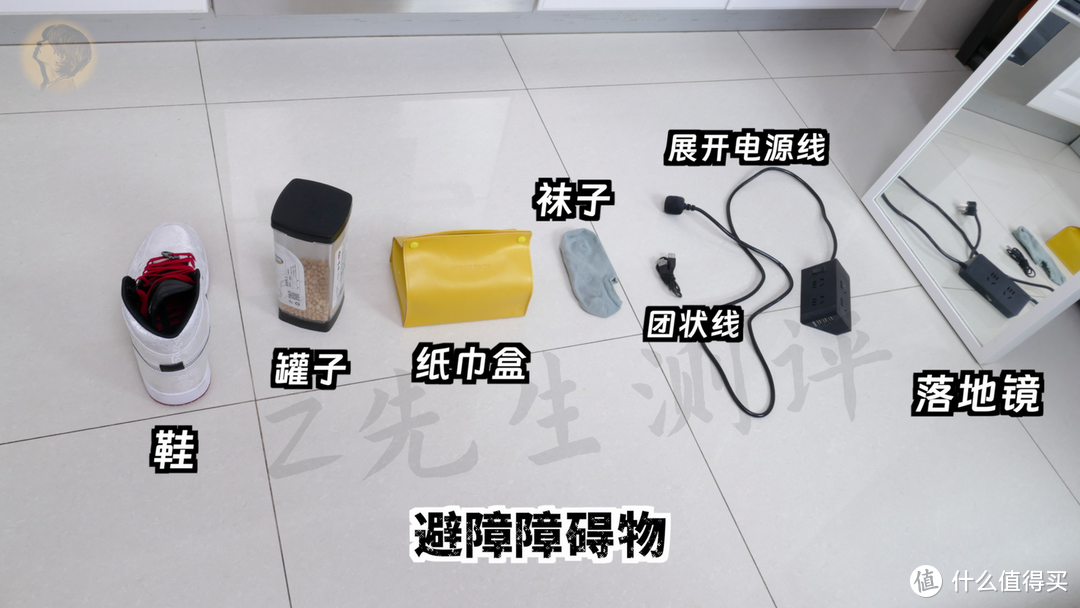
纵观大多数扫地机器人测评,基本使用中高障碍物,而非袜子、电源线等低矮障碍物进行避障测试。即便使用数据线,也不懂区分团装还是展开(两者难度完全不同)。所以看似主流机型的避障性能都差不多,没有区分度。
为了更全面测试3台机器的避障性能,本文测试使用障碍物包括:中高障碍物(白鞋、塑料罐、纸巾盒)、低矮障碍物(展开的袜子、小尺寸的黑色团装数据线)、展开电源线、落地镜等,还将测试全黑环境下的避障性能。
「2、中高障碍物避障(鞋、塑料罐、纸巾盒)
先测试难度最低的中高障碍物,结果如下图。
追觅完全没有推动障碍物;石头轻微推动纸巾盒,但无伤大雅;科沃斯对于纸巾盒、鞋子的推动幅度相对较大。

「3、低矮障碍物避障(展开袜子、黑色团装数据线)
对于低矮障碍物袜子和团装数据线,追觅保持水准,没有推动障碍物且保持相对合理的绕行距离;科沃斯表现次之,策略相对更加激进,对两个低矮障碍物贴边绕行,仅对数据线轻微推动;石头看似没有推动障碍物,但策略过于保守,上方的区域有大面积漏扫,从app的清洁路径也可以看出上半部区域完全没有清理到:
「4、特别障碍物避障 — 落地镜
很长一段时间以来,扫地机器人无法识别落地镜或透明玻璃,我曾遇到过机器人建图时将落地镜一侧的墙面识别成通道。无法识别落地镜也会造成机器人误撞、甚至损坏镜面,带来不必要的麻烦。
以上便是本测评新增落地镜作为障碍物的原因,镜子放在区域右侧,结果如下图:
石头成功识别出落地镜并在app端标注。避障依旧采用非常保守的策略,无论是沿边时还是弓字时,均远离镜子,以漏扫镜子前一块区域换取安全性;
追觅app并未标注落地镜,在沿边和弓字时也都离开镜子一定距离,清洁覆盖率和安全性之间,相对均衡;
科沃斯无论沿边还是弓字,均紧贴镜子边缘,且在弓字时和镜子底部有轻微碰撞,策略较为激进;
「5、特别障碍物避障 — 展开电源线
接下来难度加大,将一根长的黑色电源线完全展开,对扫地机器人属于较高难度避障测试。
下图可见,追觅较为均衡地完成避障,既清洁大部分区域,也没有将电源线卷入机器缠绕住,综合表现较好;石头一开始表现较好,清洁一阵子之后进入右上方区域,之后花费很长时间始终无法离开(右侧就是一片开阔区域)同时app报错,需要人去解救;科沃斯则直接缠死了电源线并报错,中断工作需要人工解救。
电源线在家庭环境中较为常见。一旦被扫地机器人卡死数据线,会导致清洁任务中断,需要你去解救,是非常麻烦的事。

「6、特别避障 — 黑暗环境(鞋子、纸巾盒、袜子、黑色卷尺)
最后,在暗光条件下,测试机器人避障功力保留几分。石头和追觅暗光下自动开启LED补光,科沃斯无此功能。
障碍物为中高障碍物(鞋子、纸巾盒)、低矮障碍物(袜子、黑色卷尺)。下图可见,石头和追觅在暗光下自动开启LED灯,未推动障碍物,表现不错;科沃斯表现也还不错,虽然没有补光,仅对卷尺发生一定程度推动、对纸巾盒发生轻微推动。
本章节避障性能测试结果汇总如下,可以看到追觅的优势比较明显,不仅配置占优,识别障碍物准确度高,绕行策略既不激进也不过于保守,保持水准;石头的硬件配置有优势,但避障策略偏保守,以安全为先,造成不同程度的漏扫;科沃斯的配置不占优势,实际表现也略逊于追觅和石头。

4、易维护
我在年初写的扫地机器人避坑指南里提到,扫地机器人尽管相对解放双手,但还是需要维护的。尽量降低机器的维护工作,是各大厂商努力的方向。
「1、防缠效果
清理边刷、主刷上缠绕的毛发和垃圾,是扫地机器人主要的维护工作。
· 滚刷防缠方案
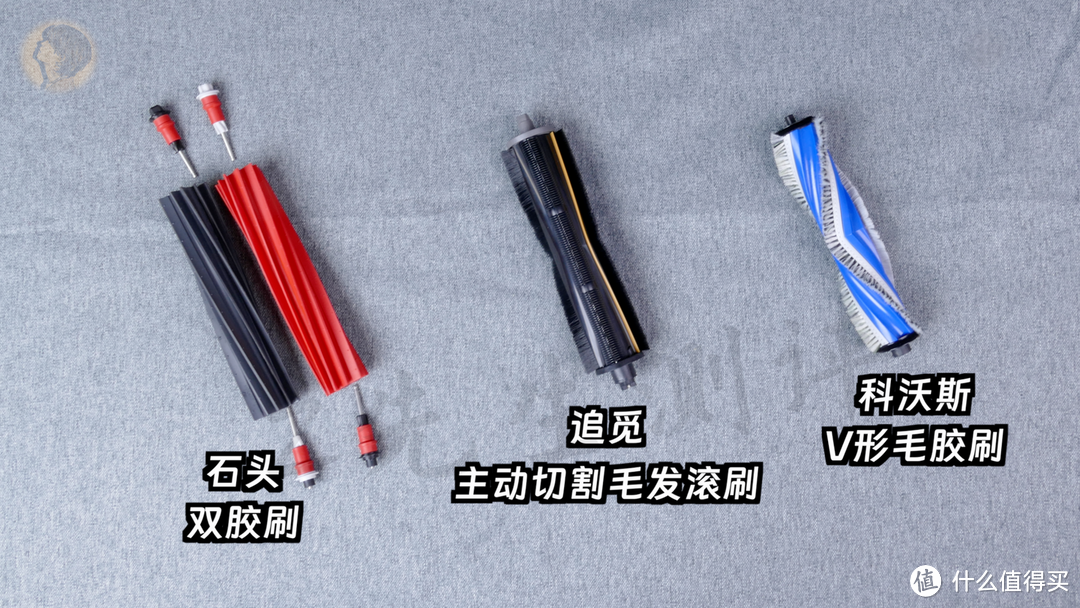
先看滚刷,这两年来各大品牌对于滚刷形态不断迭代,核心目的是在兼顾清洁力的前提下,降低毛发缠绕的几率,从而降低毛发清理的工作。本次测评的3台机型的滚刷设计如下:
石头:双胶刷,可以看到iRobot的影子,毛发会伴随着旋转汇集到两头,再将两端转轴取下清理;
追觅:切割毛发滚刷2.0,较1.0升级了防静电刷毛。滚刷内置刀片,毛发缠绕至滚刷后会被切割吸入尘盒;
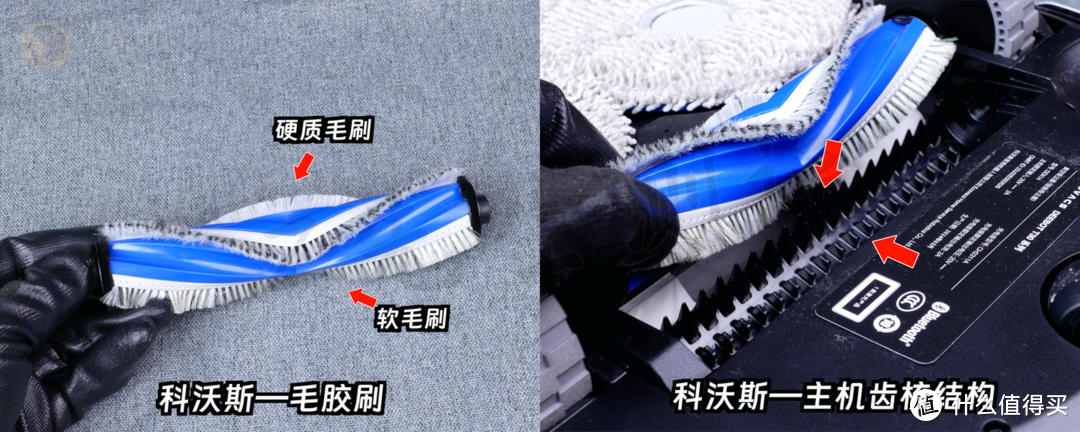
科沃斯:新设计的V形毛胶刷,结合主机的两排齿梳,将毛发勾断吸入尘盒;
再来看细节,追觅的滚刷内置刀片组,毛发缠绕得越紧隔断效果越好,不用担心伤到地毯等较粗的织物。这次滚刷2.0升级了防静电刷毛、优化了胶条:

石头的毛发防缠方案源于iRobot,在上一代胶刷 vs 毛胶刷的比拼中有一定优势,但和现代较新的毛发防缠绕方案比,维护工作量偏大,毕竟需要将两个滚刷4个转轴都取下来,再清洁毛发:

科沃斯作为毛胶刷的鼻祖,再次升级了主刷形态。软质毛刷和硬质毛刷相间设计,当主刷旋转时主机上两排齿梳结构可将毛发勾出来,再被吸入尘盒:
· 防缠效果
为更加贴近真实使用效果,在完成各种暴力测试后,我们再来对比滚刷、以及边刷的毛发缠绕情况。
下图可见:
追觅真实做到边刷和滚刷无毛发缠绕;
石头的边刷、胶刷两侧均有毛发缠绕,不过胶刷两侧汇集毛发也是设计的本意;
科沃斯的边刷和毛胶刷均有毛发缠绕,主刷的毛发集中在两端和中间,主刷的硬质刷毛依旧非常容易缠住毛发。双齿梳勾断毛发的效果,还有待提升;

把滚刷都取下放在一起,对比更加明显。除了追觅,其他两款的滚刷毛发清理,都有一定的工作量:

「2、基站维护(长期使用后测试)
基站底部定期清理,也是维护工作之一。
随着产品不断升级,市面上基座清洁盘不可取下的机型已经越来越少。
本次三款机型的清洁盘均能直接取下清洁,维护便利程度均在水准之上。其中石头和追觅的上坡能取下清洁,科沃斯则是清洁盘整体设计,上方的搓洗滤网亦可单独取下清理。

我们来对比基座使用前、重度测试之后的状态:
先看追觅,追觅的清洁盘升级为2.0。自带自清洁双刮条,当拖布旋转清洗时,带动转轴和刮条清洁基座底部。拖布清洁肋和顶部三角形过滤网重新设计,提升拖布搓洗效果、更方便脏污聚拢。
下图是暴力测试后基座的状态,左图可见表面上几乎看不出有明显污渍残留。右图是取下清洁盘之后,脏污主要集中在顶部集水槽,用纸擦拭即可彻底清洁。

石头通过一根抽水管直接将清洁盘内的污水抽走,污渍不会流到基座下方,一体化滤网还有霍尔传感器,可检测污水阻塞溢出。可以看到暴力使用后清洁盘状态也不错,取下滤网可以看到下方有些污渍残留,直接用水冲洗即可。

科沃斯的清洁盘是整体设计,可以整个取下清理。左图可见长期使用后表面无污渍,状态较好,右图可见取下过滤网后,下方残留的污渍相对较多,且较多为液体状态,需要定期清洁否则不容易干燥。

「3、自动集尘
按照集尘袋容量看,追觅3.2L、科沃斯3L、石头2.7L,容量依次降低。官宣追觅可一次使用100天、石头和科沃斯可使用90天。另外,追觅和科沃斯的尘袋有活性炭黑色涂层,可进一步除味杀菌。

关于自动集尘,科沃斯有一个小的细节改进,就是将一次集尘变成两次连在一起的短集尘,噪音感受更好一些
总结一下3台机器的维护性,可以看到追觅无论在毛发防缠绕、基站维护、集尘袋更换频率等方面均保持优势。

5、智能交互
「1、语音助手
语音助手近年来逐步成为头部品牌主力机型的标配。本次3台机型也都有此功能,可分别通过『你好,追觅』、『你好,石头』、『OKYIKO』来唤醒语音助手功能。
从配置上看,科沃斯由于缺少了RGB摄像头,和追觅、石头相比天然比较吃亏,语音助手无法进行人形识别、无法实现召唤清扫等功能。
先看科沃斯,科沃斯的YIKO语音助手可实现基本的区域清扫,个人认为这是最常用的功能,比如发出清扫厨房的指令:

再看石头,石头比科沃斯至少多了召唤清扫功能,发出『来我这里清扫的指令』,机器人会先定位你的位置,再过来周围清扫:

最后来看追觅,追觅这次将语音助手升级到2.0,相关性能极大丰富。比如家具图谱功能,可发出类似『清扫电视柜和沙发之间』的指令,app会自动在沙发和电视柜之间划区清扫。

我对石头也尝试发出类似指令,但石头语义识别有点问题,理解成分别清扫电视机柜周边一圈、以及沙发周边一圈,而非我希望的电视机柜和沙发之间的区域。
另一个非常实用的功能是『加扫』,通过语音助手也能实现。我经常会遇到,扫地机器人清洁完的某个区域有不干净的地方,此时机器人还在清洁其他房间,任务执行ing,无法直接处理看到的脏污,比较尴尬。如果可以直接向机器人发出加扫的指令,就非常便利。
下图可见,当追觅执行扫拖任务时,唤醒语音助手直接让它加扫厨房,机器人则直接去清洁厨房,再回来继续清洁

另外,追觅还可实现多轮人机对话。比如发出预约明天清扫的指令,机器会聪明地继续询问几点开始执行任务,确定好时间后,app会自动生成一条定时任务,任务设置准确。

总的来看,从语音助手的功能丰富度看,科沃斯、石头、追觅依次增强。
「2、视频管家
追觅和石头配置了RGB摄像头,都有视频管家功能。可以远程观察家里的环境,可双向语音、巡航。从图像清晰度看,追觅更胜一筹,追觅还能控制补光灯。石头则有一键寻宠功能,可以寻找家中宠物,有一定可玩性。

「3、宠物模式
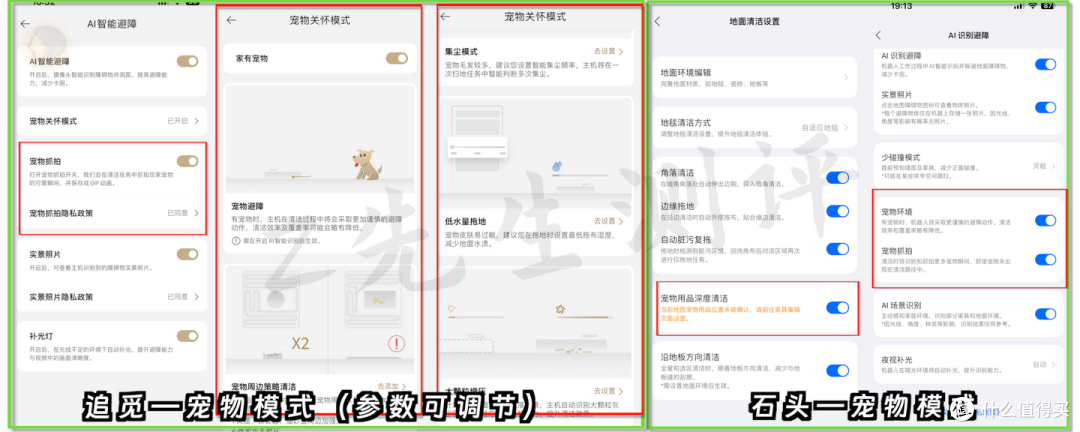
针对宠物家庭,扫地机器人的功能也越来越丰富。追觅和石头均有宠物模式,其中追觅针对宠物,可有针对性地设置避障、宠物周边清洁、集尘、拖地水量等参数,客制化程度较高;石头也有宠物环境选项,但用户不能自己调整参数,机器默认了一套清洁策略。
总结一下,在智能交互方面,我认为追觅依旧保持优势,印象最深刻的是语音助手2.0,可实现的指令最为丰富。

6、路径规划
绝大多数测评到此为止了,不过我还是想测试一下机器人遇到家庭环境变化和突发状况,路径规划能力/地图定位的能力强不强,到底『聪不聪明』,我会进行下面6项测试:
测试1:机器去房间清洁,但关上门,观察多久判断出无路可走 测试2:机器在房间,令机器回充,关门一阵子之后把门打开,观察机器如何处理 测试3:机器在房间并关门,令机器回充,观察多久判断出无路可走 测试4:接上面测试,打开门令机器人回充,观察回充效率 测试5:机器人基座前放置两张椅子,令机器人回充,观察回充效率 测试6:先令机器人区域清洁,同时移动基站位置,观察机器人是否能顺利找到新基站、是否轻易重新建图、是否丢地图
我们一项一项来看:
「测试1:机器去房间清洁,但关上门,观察多久判断出无路可走
这是日常使用扫地机器人比较常遇到的,让它清洁某一个或几个房间,结果房间门被误关,机器人无法进入房间。
下图可见,追觅仅耗时48秒就报无法找到区域,回基站了,效率最高;科沃斯耗时1分46秒,才判断无路可走,回基站;石头耗时最长,为3分58秒,最终回基站。
「测试2:机器在房间,令机器回充,关门一阵子之后把门打开,观察机器如何处理
类似上面的测试,但这次更复杂一些,令机器人清洁厨房但先关门,过一阵子开门,看机器人是否发现有路可走并进入厨房。
这次表现依旧是追觅最快,开门后22秒就进入厨房。石头第二快,耗时43秒,进入厨房。科沃斯在1分31秒后,一直困在左侧关门的区域,最终报错。
「测试3:机器在房间并关门,令机器回充,观察多久判断出无路可走
这次将机器人困在厨房里,令其回充,观察多久判断无路可走。
追觅还是最快报错,耗时2分55秒。石头和科沃斯略慢,分别耗时3分08秒、3分18秒报错。
「测试4:接上面测试,打开门令机器人回充,观察回充效率
接上面测试,先开门,再令机器人回充。追觅依旧最快,24秒直接找到出口回充;科沃斯差不多快,耗时29秒排名第二;石头定位耗时有点久,总共花费1分39秒找到出口。

「测试5:机器人基座前放置两张椅子,令机器人回充,观察回充效率
在机器人回充路径上加两张椅子,其中一张距离基站非常近,仅留出一个机身位置,观察机器人是否能顺利回充。
这次石头表现最快,大约52秒就完成回充,寻找回充路径时试探一下发现椅子底部不能通过,马上绕行回充,反应很快;追觅耗时58秒,思路和石头一样,也是一开始想从椅子中间走,发现不同绕行回充;科沃斯没有回充成功,在客厅寻找很长时间,最后花费2分19秒报错找不到基站。
「测试6:先令机器人区域清洁,同时移动基站到最南面房间,观察机器人完成任务后是否能顺利找到新基站、是否轻易重新建图、是否丢地图、APP是否自动更新基站位置
下图可见:
追觅来到原本基站的位置由于接收不到基站信号,直接报『基站未通电』就停下了,效率倒是最高,仅耗时24秒,但没有主动寻找基站;
科沃斯发现原位置无基站信号之后,一直在客厅区域反复寻找,但我将基站移到的是最南面的房间,而非客厅,最终花费7分20秒报『未找到基站』;
石头找不到基站后开启了全屋寻找,每个房间都找了,可惜进入最南面房间时没有发现基站信号,最终回到原来基站位置报无法找到基站,总耗时25分钟;
这项测试没有一款机型达到我的期望。虽然三款机型都没有丢地图、也没有直接重新建图,但没有一台找到新基站的位置。
总体上看,追觅在遇到家庭环境变化时,应对最为果断,在多数测试中决策效率最高,从路径规划和地图的角度观察,相对更加『聪明』。

四、总结

如果你看到这里,恭喜你完整地看到3台热门机型的方方面面。诚然,作为头部品牌主打机型,每台都有自己的性能优势和特点,但将他们放在一起评价并不是一件容易的事。随着扫地机器人功能越来越复杂,需要考量的内容也越来越多,希望我的测评能带给大家完整的视角,而不是一堆拍摄精美的图片和你好我好大家好的结论。
本文所有测评结果,都汇总成了下表(红色是优势项),大家可以点开放大:
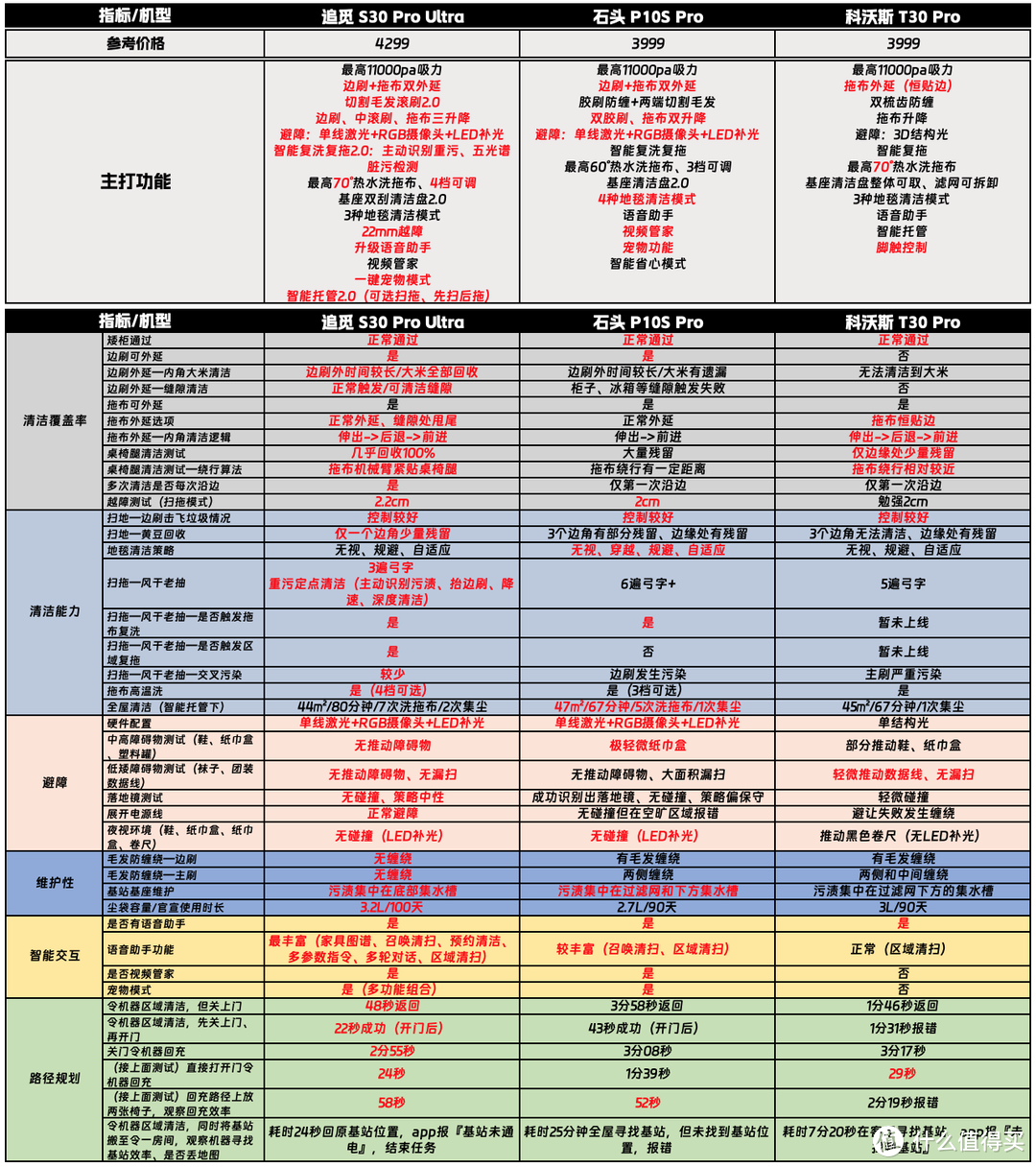
从上面的表格可以清晰地得出结论,追觅S30PU在三台机型中硬件更有优势、软件算法结合更好,综合性能更强。在扫地机器人最基本的清洁力和清洁覆盖率方面下了功夫,包括合理的边刷机械臂外延算法、拖布机械臂缝隙甩尾以及桌椅腿算法加强(均提升覆盖率)、重污主动识别深度清洁、持续保持优势的智能托管复洗复拖、多次清洁均沿边等。避障表现依旧稳定,切割毛发滚刷易维护,智能性方面智能管家2.0性能出众、面对突发状况应对合理果断。综合来看,机器可适合不同使用场景和各类人群,是3台机型中最佳选择。
石头和追觅同样主打双机械臂,但在边刷拖布外延相关算法、以及和清洁性能有关的算法上,体现了追求时效的特点。边刷外扩时间偏短、重污清洁路径偏稀疏,这样做的好处是清洁效率比较高(比如全屋清洁耗时短),但容易造成垃圾漏扫、以及相关清洁能力的下滑。避障方面以安全为优先,采取的策略较为保守,和不配置RGB摄像头、采取激进策略的科沃斯相比并没有体现优势。双胶刷和市面各大品牌新设计的滚刷相比,原来的优势被削弱。原本路径规划/地图地位等方面的潜在优势,测试下来并没有特别亮眼之处。
科沃斯在配置上和另两款比有点吃亏,其主打的拖布恒定外扩对于拖布覆盖率有加分(比如桌椅腿测试中)。和令两款相比少了边刷机械臂,对于边角清洁有天然劣势。其主打的毛胶刷+双齿梳结构,实测还是会发生毛发缠绕。避障不配置RGB摄像头,在部分场景下有些吃亏,但对于袜子团装数据线等低矮障碍物的绕行做得比较平衡。智能交互、路径规划方面,表现相对普通。
好了,这次2024年4000价位热门机型超级横评就结束了,如果你觉得写得不错,欢迎点赞,并关注我。
我是好久不见的Z先生,我们下一篇测评再见。
















值友8830674026
校验提示文案
青蛙布丁
校验提示文案
值友8830674026
校验提示文案
青蛙布丁
校验提示文案