




































































608
102
2024年扫地机器人在卷什么?极致贴边,盲区清洁,科沃斯T30 Pro TruEdge灵隙灵动恒贴边技术抢鲜看
2024-05-18 11:48:04
1点赞
1收藏
3评论
本次要讲解的是2024年具有极大看点的扫地机器人技术,以及科沃斯2024年新品T30 Pro的测评,非常亮眼。T30是我近两年看到的很有创新性,体验感非常好的一款产品。
大家好啊,我是家用电器优秀答主 @拾宝贝儿,机械工程博士,机械高级职称,本职工作就是机械产品的研发,做家电产品的测评跟我的工作、兴趣完美结合。所以,业余时间一做就是好几年。
扫地机器人是我一直在关注的智能家居产品,也有不少内容得到大家的认可。这篇文章已经有62万阅读量,为上千位读者带去了选购建议。

每一位留言的读者,我都逐一回复了。大家有任何疑问,可以继续在我的文章评论区留言,我看到都会回复。
本文想要探讨的是2024年扫地机器人的技术趋势,以及产品功能方向问题。搞清楚这个问题,大家就可以把握住选购重点,重点关注新技术、新功能,买到好用的扫地机器人。
同时,本次文章也把扫地机器人的工作原理做了尽可能通俗的阐述,再把一些关键技术融合到了原理阐述之中,感兴趣的同志们可以详细阅读,这样就知道为什么要关注这些关键指标了,知其然也知其所以然。
一、2024年扫地机器人主要迭代方向:提高覆盖率(亦即减少清洁盲区)、解决毛发问题
进入2024年,扫地机器人这个产品会继续升级的方向我认为是2(重点)+1(非重点):
继续提高机器人的清洁覆盖率,减少清洁盲区会是一个持久课题,目前的技术方案还有优化空间;
毛发清理仍然是痛点,目前常规的滚刷缠绕毛发无法避免;
厂商还会继续卷吸力,这一项我个人列为非重点项。
扫地机器人这个产品远未到成熟的时候,几乎年年会有更新迭代,针对每一项痛点问题,逐年会有进步,但无法100%消除,大家在购买之前,需要有一个正确认识。
1、2023年减少清洁盲区方面具有代表性的技术方案是机械臂、扭屁股两种方案
在2023年,针对墙边、角落等盲区的清洁,有两个很典型的技术方案:
在机器人底部设计一个可伸缩机械臂,优点是可伸缩,遇到角落、墙边区域,自动伸出,是一个很好的创新思路;
所谓扭屁股就是机器人向墙边、角落等区域做出“甩尾”动作,让拖布靠近这些区域达到清扫目的,这个不增加硬件,对传感系统、软件设计要求很高。
下图是费了老大劲才拍到的素材,很好地展示了扭屁股与机械臂的工作现场。

这两个技术方案,在2023年非常亮眼,但也是有进步空间的:
针对机械臂,目前使用机械臂方案的产品实现的是伸出、收回两个动作,机械臂伸出的长度是固定的,可以称之为“单级调节机械臂”,面对复杂的室内环境,灵活性还可以提高;
扭屁股方案依赖算法,面对复杂的用户场景,还无法做到100%的“扭”动作触发率,同样存在提高空间。
2、2023年处理毛发问题的代表技术方案是滚刷结构起到切割作用
采用滚刷切割的方式将长毛发变成短毛发,从而有利于吸入尘盒,这个技术方案在洗地机、吸尘器中已经率先应用,扫地机器人产品在2023年也得到了应用。
这个功能比较实用,关注的用户也很多,有长发女主、长毛喵星人、汪星人的家庭会格外关注这一点。
3、2023年吸力最高卷到了8000Pa水平
这一点我个人觉得要用辩证的角度去看,大吸力可以更好地剥离附着力强的粉尘等,但是也会带来更大的工作噪声。
我个人的建议是,如果大家选择的是主流品牌的热销型号,吸力看一眼就行,大家都会在差不多的水准,没必要再去对比谁多了500Pa,谁少了200Pa诸如此类的问题。
以后厂商在吸力方面还会继续卷,大家跟着用就行,不用可以当做对比指标来考虑。
二、科沃斯T30的升级亮点预览:如何减少清洁盲区,解决毛发缠绕?
讲完扫地机器人的产品升级方向,带着问题,看了下最近体验到的科沃斯T30,是2024年的新品,做了哪些升级,如何解决上述痛点问题。
根据我的个人喜好,我认为科沃斯T30的核心看点有三个:
官方说法TruEdge灵隙灵动恒贴边技术,我翻译下就是可以无级调节的机械臂,提高清洁覆盖率,针对墙边、角落、桌腿这些传统清洁盲区有很好的效果;
官方说法Zero Tangle灵缠双梳齿防缠绕技术,继续翻译,就是V型滚刷设计,利用结构设计防止毛发缠绕,针对性解决毛发问题去的;
造型大变样,一改前几年方方正正的刻板形象,尺寸变小了,更容易内嵌安装,水箱改变了提取方式也更利于内嵌安装,这是冲着安装、布置美观性去的;
除了三个核心看点,还有一些亮点也很不错,有的是保持了之前型号的优点,有的是一些指标升级,比如:
全链路热水清洗,热水拖地,小水箱自动加注70℃热水,拖地的过程中仍然还可以保持有约50℃(不同地区、不同季节余温会有差异)的热水拖地效果,热水洗拖布,热风烘干;
吸力提高到了11000Pa级别,真的卷啊!
全链路抗菌配置,抗菌清洁液、抗菌尘袋、抗菌滤芯组合使用,可以很好的达到除菌、隔菌的效果。
下面详细展示这些升级亮点。
三、TruEdge灵隙灵动恒贴边技术,进一步提高清洁覆盖率,减少清洁盲区
1、扫地机器人工作原理,灵隙灵动恒贴边指的是什么
科沃斯TruEdge灵隙灵动恒贴边技术的核心载体是一个可以无级伸缩调节的机械臂,官方的标准名词是无级悬停机械臂:
传统机器人的两个拖布是固定位置旋转,不可伸缩;
同时期其他机械臂技术方案的拖布机械臂只有收回、伸出两个动作,机械臂伸出的长度是固定的,不可调节。
我个人的理解:这个可以无级调节的机械臂就代表了“灵动”,机械臂可以灵活地伸缩、摆动。
而“灵隙”则是由软件设计决定,在清洁行走时,灵活走位,与墙边、障碍物做到“零间隙”,达到提高清洁覆盖率,减少清洁盲区的目标。
在详细解释TruEdge灵隙灵动恒贴边执行细节之前,先简单聊一下扫地机器人地图构建与路径规划的基本概念,这样有利于了解TruEdge灵隙灵动恒贴边技术的精髓。
扫地机器人的工作步骤简单来说,有以下过程:地图构建、路径规划、执行清洁、回充+自清洁。灵隙灵动恒贴边就是使用在执行清洁动作环节的技术。
(1)地图构建
建立地图的关键技术叫做SLAM(Simultaneous Localization and Mapping,同步定位与地图构建),是实现机器人自主导航及后续交互的关键技术之一。
SLAM通过使用相机、激光雷达、惯性测量单元等传感器收集环境信息,结合算法对这些传感器信息进行融合处理,用以确定机器人在未知环境中的位置,并构建出一张环境地图。
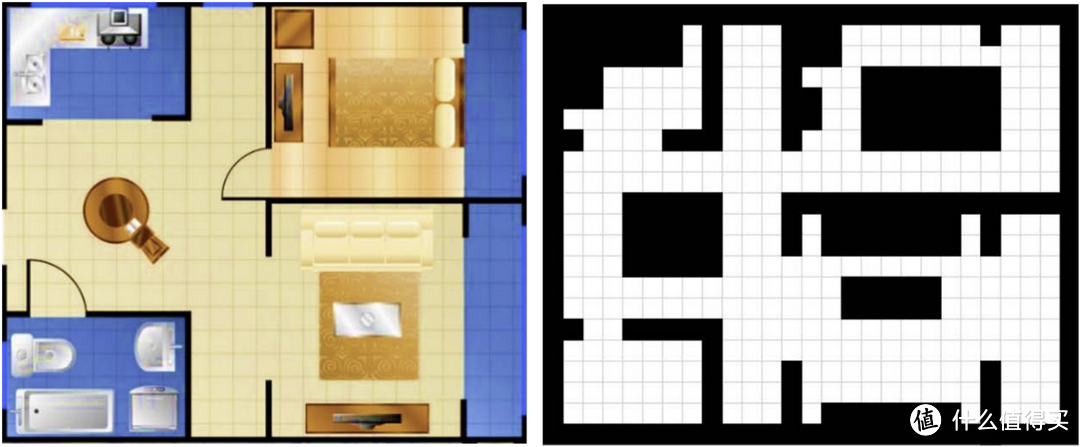
下图是一个示意,灰色是待探测的未知区域,白色是通过传感器扫描识别到的室内区域,在机器人的视角就已经收集到室内区域信息,存入控制系统。
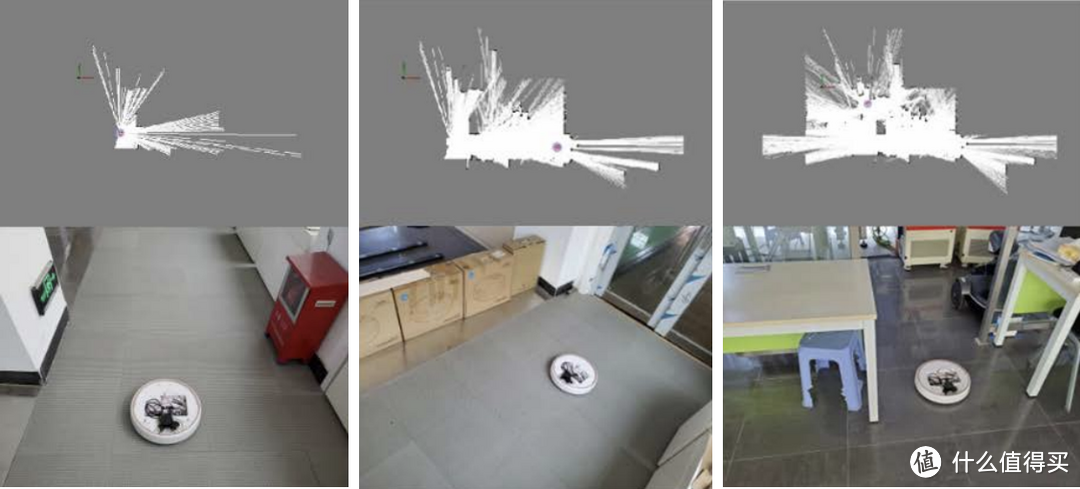
机器人的控制器接受到雷达、红外的信号进行处理,在机器人系统里把地图存储成了下图右侧的样子。然后再进行交互处理,反映到用户APP的界面,就成下图左侧的样子,大家在APP里看到的就是这种。
目前主流厂商的旗舰、热销扫地机器人都会使用到VSLAM技术,也叫3D SLAM。就是激光雷达组合3D结构光或者摄像头,达到3D识别效果,可以好地构建地图、识别障碍物。
科沃斯T30也属于VSLAM范畴,头顶是激光雷达,正前方内置一颗3D结构光模组,激光雷达+结构光=3D SLAM。
(2)路径规划
当扫地机器人将地图构建完毕,就会规划出清洁线路,这里就涉及到一个全局路径规划的概念。
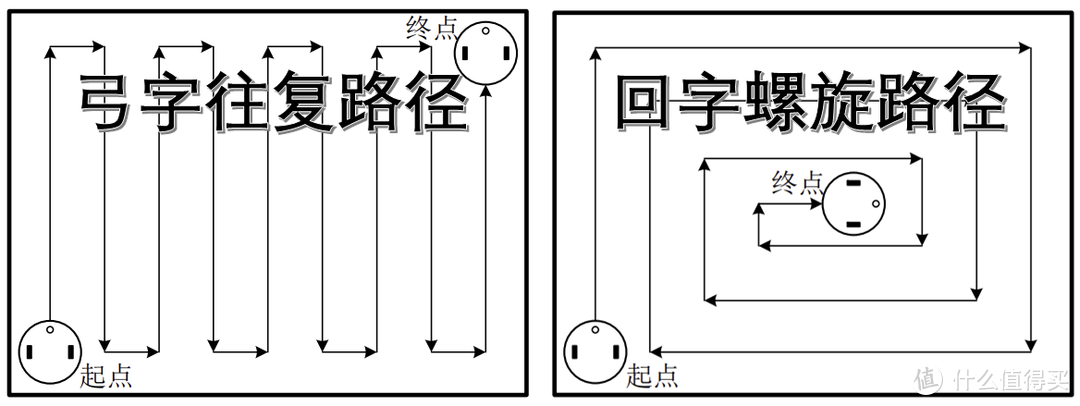
当激光雷达把室内所有屋子都扫描了一遍,就会规划出一个整体的清洁线路。如何走位,就叫做路径规划,举一个简单的例子,同样一个房间,机器人即可以走“弓”字型路线,也可以走“回”字型路线。
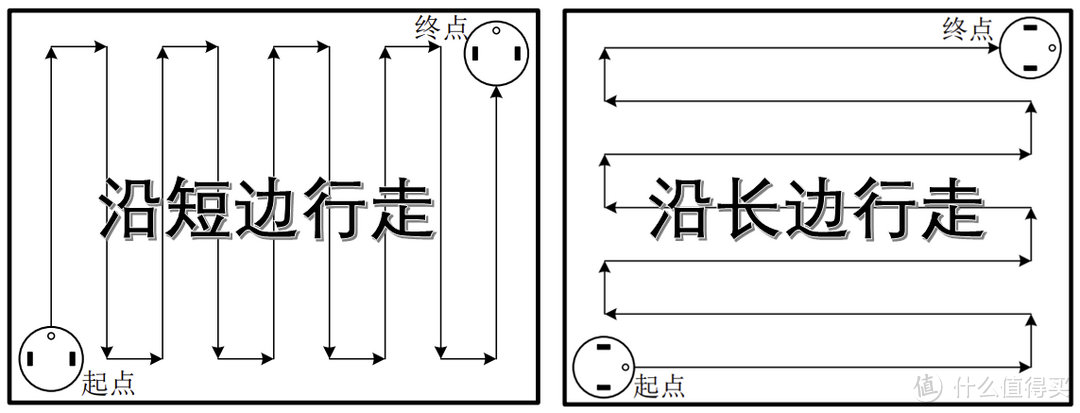
同样是走弓字往复路线,也要沿着长边行走、沿着短边行走不同的方案。
针对不同的功能需求,还有不同的路径规划,如下所示。
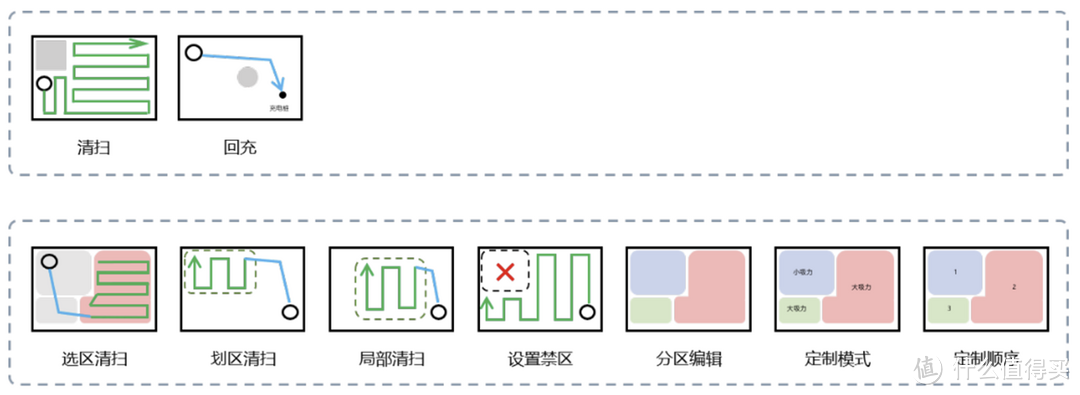
所有的机器人,这些路径形式都会设定在程序里。这就是为什么,大家看到自家的机器人,每次清洁都是一个路径模式的原因。
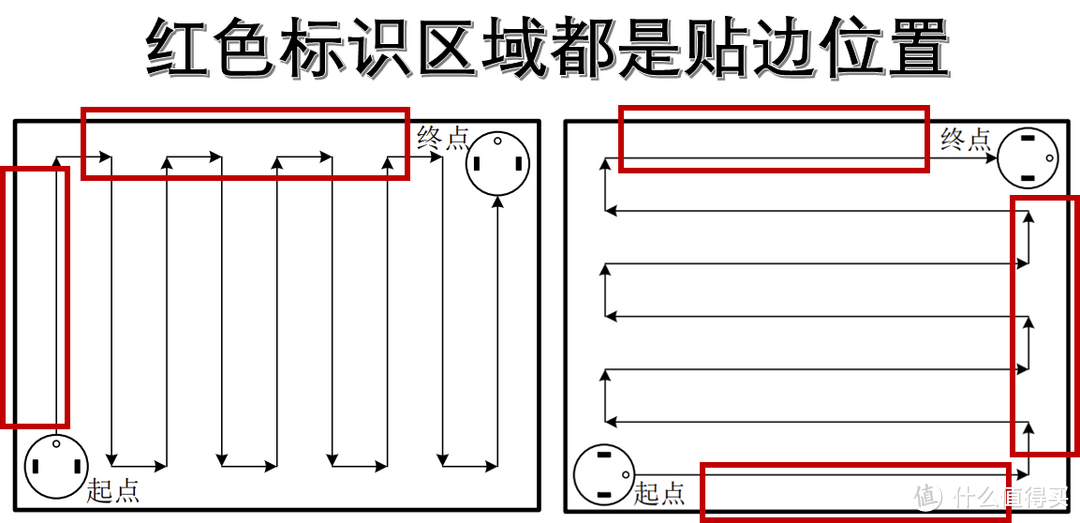
当所有的室内区域都规划完毕,机器人内部会把整个房间内部区域划分成不同格栅,每个格栅的行走路线也会规划清楚,机器人就会跟随规划路径(有图的线条)进行清洁行走。

(3)执行清洁指令
这里就开始涉及到TruEdge灵隙灵动恒贴边技术了,当机器人根据地图设定好行走路线,机器人就会根据设定路线进行清洁。
在执行清洁指令时,科沃斯T30的TruEdge灵隙灵动恒贴边就会有两个独有特点。
第一个特点是往复行走过程中机械臂全程伸出,在这个场景,大家就把它当做传统固定拖布的机器人,只是一侧的拖布位置伸出了一些而已。
这样的好处就是走到墙边时,很自然的就可以贴着过去,无需做伸出动作。

第二个特点是行走到角落、障碍物时,无级悬停机械臂会根据机器人与障碍的距离,自动进行调节伸出的长度,达到最合适的距离。
这里可以看看T30在我家清洁的一个画面,贴墙角行走时拖布与墙边几乎是零间隙,转角处也几乎是切线转过。

这里截取几张放大图,可以看到,对于直角区域,机械臂已经与两个墙面形成了切角,覆盖率已经到极致了,剩下的那一丁点拖布触及不到的三角区非常之小。
可以说,这个表现是目前扫地机器人能够做到的极致了。

这里特意将宠物饲料挨着墙角撒了一条,正常的扫地机器人是很容易漏扫的。但是科沃斯T30的边刷+无级悬停机械臂顺利把所有饲料颗粒从墙角清扫出来,在第二次路过时全部吸入。

而针对类似桌腿等障碍,机器人绕行时,拖布的伸出长度是可以根据机器人与障碍的实时距离进行调节的,一直保持了尽可能的零贴。
2、TruEdge灵隙灵动恒贴边技术解决了什么问题?
先梳理一下目前其他机械臂技术、扭屁股技术与TruEdge灵隙灵动恒贴边技术的各自特点:

可以明显看出,TruEdge灵隙灵动恒贴边技术是在目前机械臂技术方案的升级,从技术原理上,可以更加贴边,清洁更加彻底。
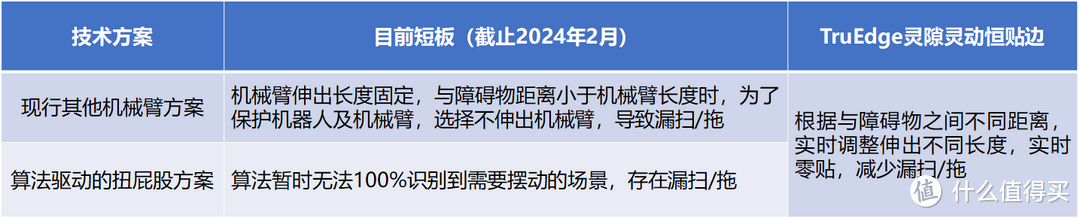
可以这么说,截止到2024年2月我撰写这个帖子,科沃斯T30搭载的这个TruEdge灵隙灵动恒贴边是我看到的市面上:真正实现了“零”贴,且“零”贴概率很高的技术。
为什么这里会强调一句“零贴概率很高”?
无论是机械臂,还是扭屁股,都会依赖障碍物识别算法,以及局部路径规划算法的约束。简单点说就是,算法设计得好,机器人就可以表现出“零”贴行走效果,如果算法设计得不那么好,即便有机械臂、扭屁股的配置,实际效果也不好,总有不少场景会看到机器人无法“零”贴,具体表现有:
机器人明明走到墙边了,机械臂没伸出来,或者机械臂伸出来了,离墙边还有一丢丢距离,从而形成了清洁盲区;
机器人明明走到墙边了,屁股并没有扭动,或者机器人虽然开始扭动,但是离墙边距离保持的远,也就是存在盲区。
之所以能够实现这么好的“零”贴效果,TruEdge灵隙灵动恒贴边在硬件配置、结构设计、软件设计方面都花了不少心思。
3、TruEdge灵隙灵动恒贴边如何实现真正的动态实时“零贴”?
从硬件配置、结构设计、避障策略三个方面来看。
先有眼,能看到:硬件配置要足够丰富,才能“看”到障碍物/墙角等区域;
再有手,能干活:结构设计能够支撑拖布外伸,才能拖得到这些区域;
还得有脑,如何干得好:避障策略足够精准,才能实现想要的绕行+“零”贴效果,并且次次零贴。
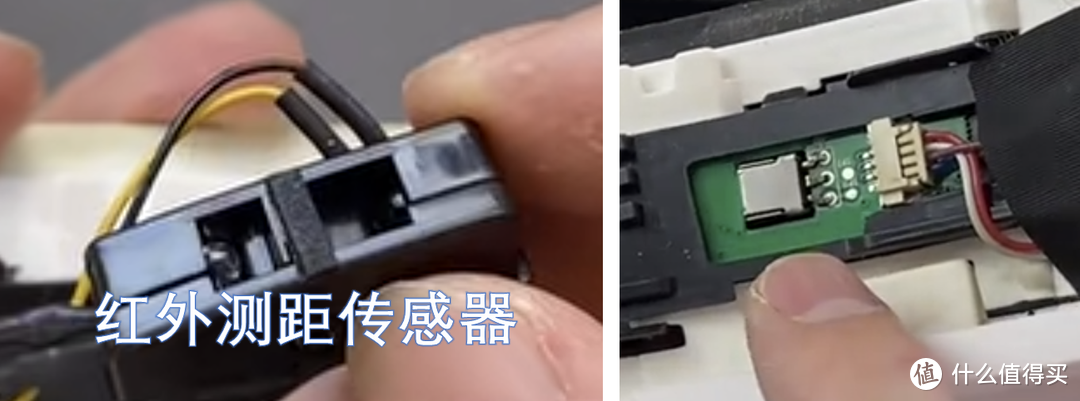
(1)有眼看得到,依赖硬件配置,LDS激光雷达+3D结构光+红外=全方位障碍物识别
想要机械臂实现的效果好,硬件层面必须配置到LDS激光雷达+3D结构光(或者摄像头)+红外防碰撞传感器。市面上配置了机械臂的机器人,基本上都是这样配置。

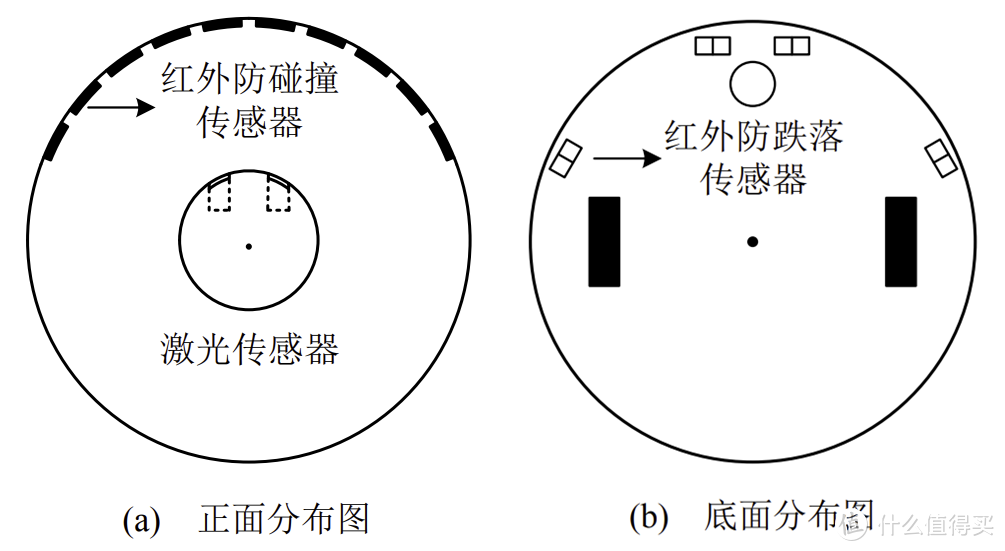
普通的扫地机器人硬件配置是LDS激光雷达+红外防碰撞传感器:
头顶上LDS负责扫描环境建立地图,并且识别大尺寸的障碍物,同样记录到地图与程序里;
红外防碰撞传感器负责对墙边、障碍物的近距离测量,当机器人靠近障碍/墙壁了,红外开始起作用,让机器人进行避让;
机器人底部的防跌落红外传感器是探测台阶防止跌落楼梯的。
这样的硬件配置存在一定的短板,因为,LDS激光雷达主要用于大尺寸物体测距、红外防碰撞传感器用于近距离测距。

也就是说,无论LDS激光雷达还是红外传感器,主要功能是测量距离。对前方物体的尺寸、性质无法做出相应判断。无法满足机械臂零贴清扫、避障的需求。
不仅如此,LDS激光雷达与红外传感器由于设计位置的原因,不可避免存在测量盲区,这一点只有靠3D视觉类技术来弥补。
例如:LDS一般设计在机器人顶端,那么对于小尺寸物体(尺寸<LDS高度)LDS距离地面的距离就会是它的测距盲区。

所以,我们现在能够看到配置了机械臂的产品,无一例外都配置了3D结构光或者摄像头,用视觉类传感技术弥补激光传感器的短板。
科沃斯T30的TruEdge灵隙灵动恒贴边技术选择的是使用3D结构光技术当做眼睛来识别物体。

(2)有手,能干活,依赖结构设计
当机器人可以“看”得见看得准,想要实现零贴边,还需要对应的执行单元。科沃斯TruEdge灵隙灵动恒贴边技术能够实现机械臂的无级悬停,核心就是采用了步进电机作为机械臂动力源。
现有的机械臂技术使用的是有刷电机作为机械臂的动力源,有刷电机在扫地机器人中应用非常广泛:边刷、驱动轮组、LDS雷达这些地方,大多数机器人都使用的是有刷电机。
有刷电机成本有优势,控制简单,对于执行单一动作的场合非常合适。大家看,边刷、驱动轮组、LDS雷达这些部位的动作就是单一的启动旋转、停止。现在的机械臂技术方案也类似,执行伸出、缩回的动作。
这里是有提升空间的,因为在用户使用场景之中,肯定存在下面这种情况。
假定机械臂伸出的长度是L,遇到机器人与物体之间距离<L的场景,单级调节机械臂就不好处理:
如果伸出,机械臂就会与物体发生触碰,若行走的是墙边则会碰撞影响机器人直线行走;
如果不伸出,则留下了清洁盲区。
科沃斯TruEdge灵隙灵动恒贴边技术采用了步进电机作为动力源,步进电机可以很好地进行角间距控制,拖布可以在任意角度悬停,实现无级悬停的效果。
这种设计显然能够适应更多的复杂场景,根据机器人与障碍之间的距离,灵活调节机械臂伸出的角度/长度。

(3)有脑,如何干得好,依赖避障策略设计
这里要是展开,是一篇硕士毕业论文,也可以是一篇博士毕业论文。
长话短说,捡重点。
扫地机器人识别障碍物,首先会根据障碍物的尺寸划分为小尺寸障碍物、大尺寸障碍物。事实上,在产品开发过程中,会根据结构光/摄像头识别到的不同物体,把看到的物体划分为很多个种类,存储在控制系统,进行查表处理。
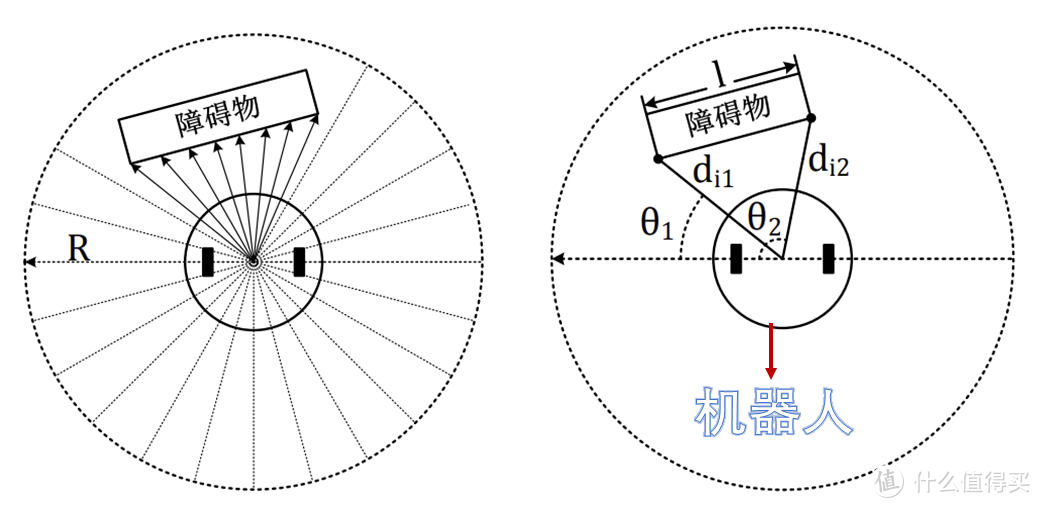
识别到障碍物的尺寸之后,根据尺寸划分到不同的分类中去。
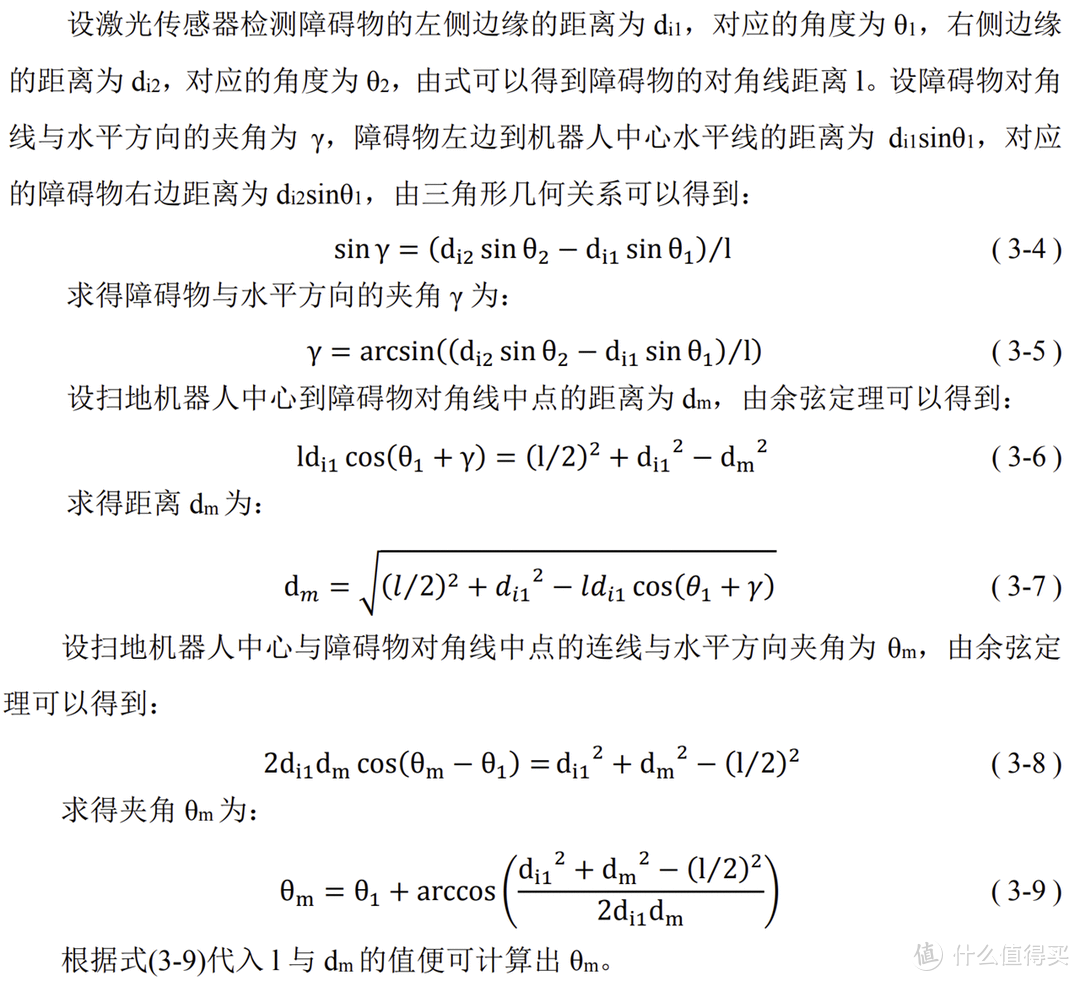
无论是小障碍物,还是大障碍物,机器人即便准确识别到了距离,避障时都要设计一个安全距离D,保证万无一失。这个安全距离可以理解为安全系数的意思,任何产品设计都会有这个安全系数的设定。
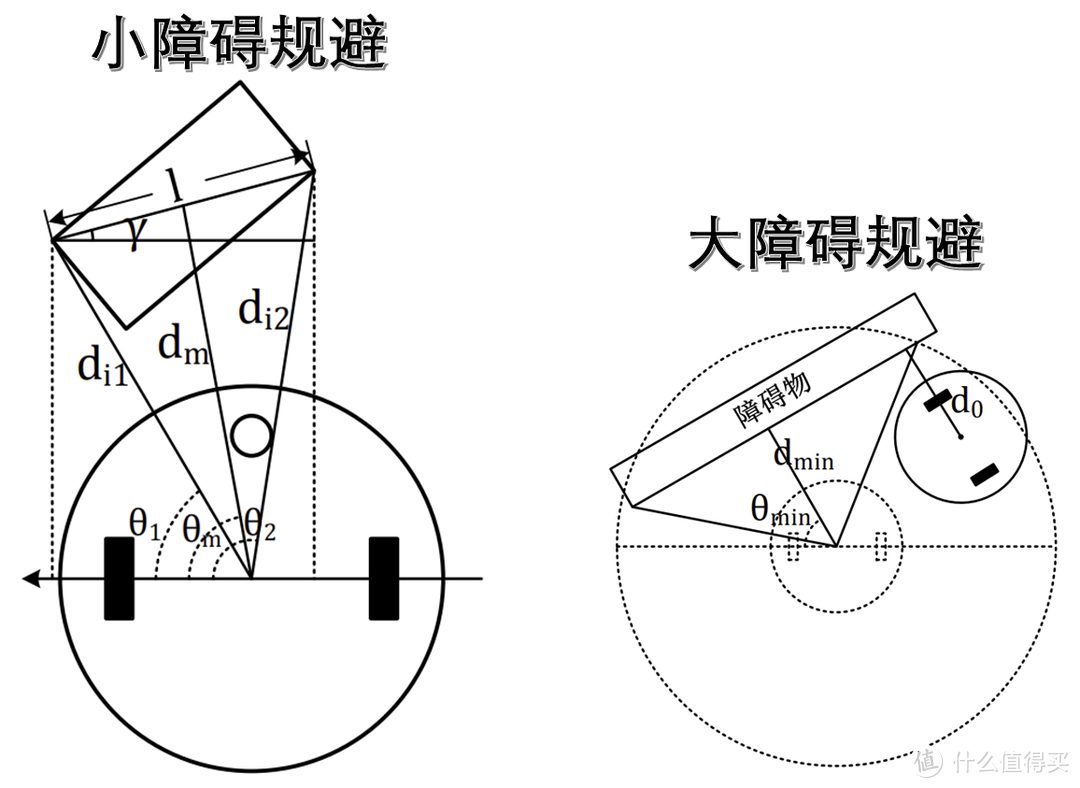
比如下面的小障碍规避,识别到小障碍物,需要计算出开始规避绕行的距离是:
之后需要计算向左绕行or向右绕行?这取决于机器人与障碍物两侧的夹角θ,判断两侧θ数值又是一个复杂的过程,下面截图只是很小一部分,你们愿意看吗?我是不愿意看。
如果策略设计者对自己的算法、执行器件有信心。那么,绕行方向可以更合理,安全距离D也可以设计得很小,机器人实际避障、贴墙行走时,拖布就越贴边。
障碍物规避是一个非常复杂过程,除了简单的计算绕行方向、避让距离,还需要考虑障碍物的地图格栅如何建立,这一步也涉及到拖布的间隔距离,这一步太复杂,也不展开了。
总而言之,我想表达的是,障碍物的避让十分考验厂商的技术能力,这里做得好,我们实际使用的机器人贴边效果就好。
否则,即便有了3D结构光(或者摄像头),有了机械臂,仍然可以看到无法“零”贴边。
四、Zero Tangle灵缠双梳齿防缠绕技术“解放”双手
我个人理解Zero Tangle灵缠双梳齿防缠绕技术的精髓就是两个结构设计:V型防缠绕滚刷、双排梳齿。两个特殊结构组合作用从而形成了不缠绕的效果。
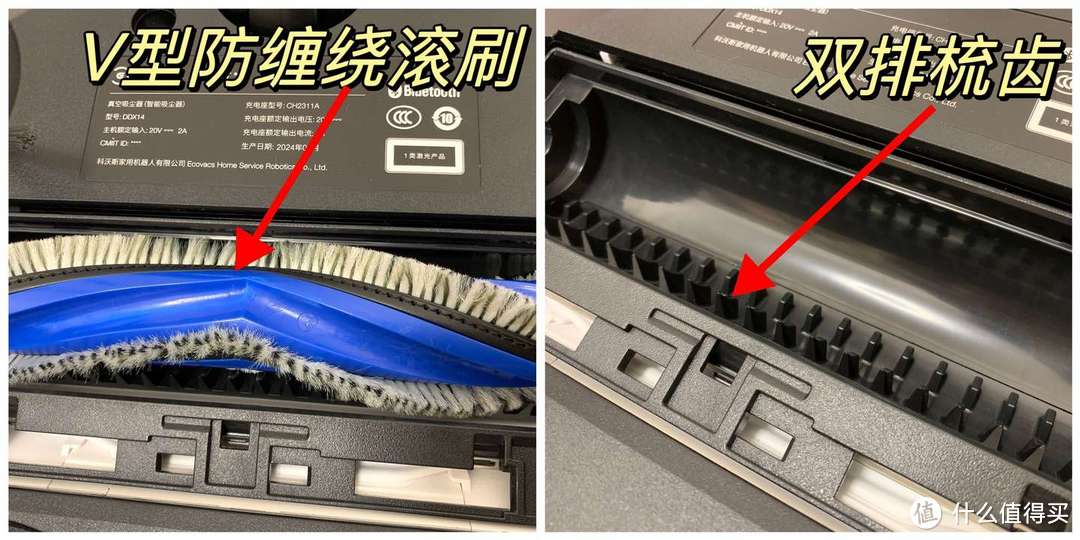
V型滚刷的关键点就在于,相对于无V形设计的普通滚刷,毛发不易在两侧形成缠绕、堆积。吸入的毛发由于V形状的存在,结合梳齿的梳理效果,会向V形底部靠拢,然后被吸入尘盒。
这里特意将一撮毛发放到滚刷边缘位置,可以看到,吸入之后也没有缠绕在边缘位置。

为了拍这个镜头把家里窗拆了你们信吗?一团散落的毛发,吸入之后,滚刷也是干干净净的。

五、科沃斯T30的其他看点
本章挑选个人觉得值得提到的亮点,就不对机器各个指标、性能搞全覆盖。
1、全新升级的基站,变化很大,值得看
造型是主观项目,大家自己看吧,合不合自己的审美。
话说回来,现在新装修家庭都可以专门设计一个扫地机器人储存柜,机器人的基站都会隐藏摆放了。

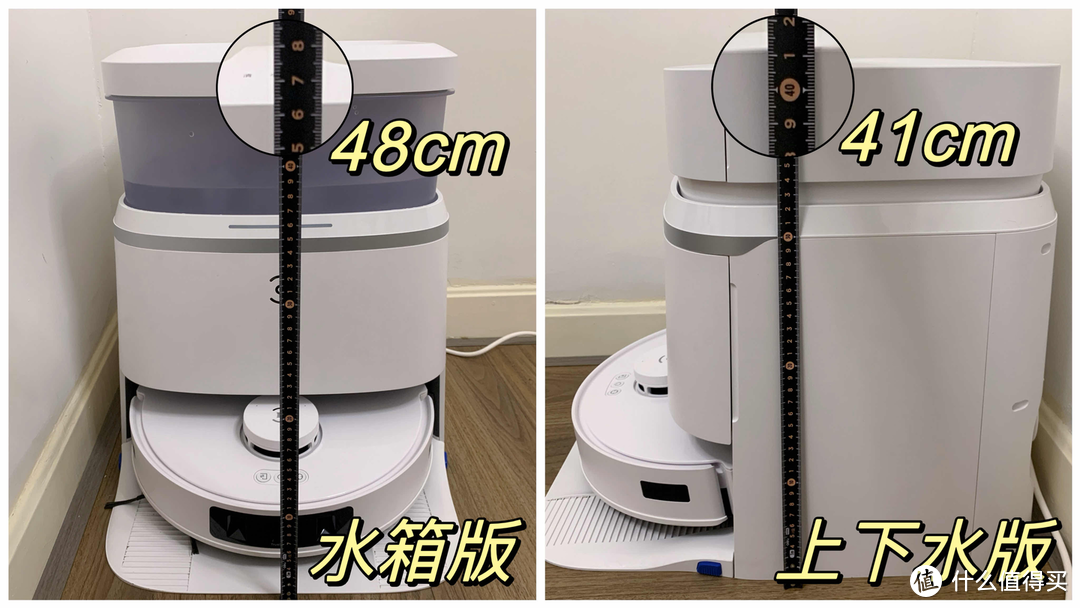
造型之所有大改观,主要是实现了水箱的低位提取,嘴说比较抽象,大家看动图吧。

只需要向上提取约5cm高度就可以横向把水箱提出来了。而传统造型的扫地机器人基站,水箱是全嵌在基站里的,需要整个全部提起,才能再横向移开。
这种新的造型设计,毫无疑问节省了高度上的空间,对于空间紧凑的橱柜、专用柜都节省了空间。让机器人基站放在这些位置变成了可能。
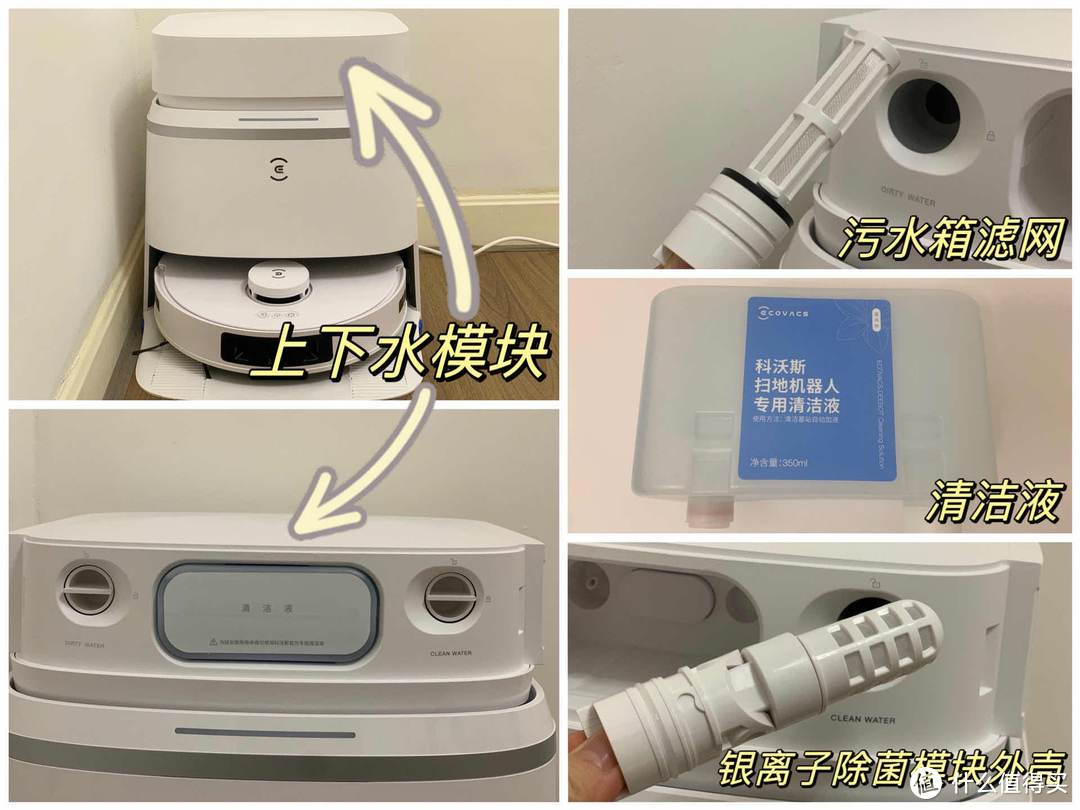
如果家里事先预留了上、下水位与电位,那么恭喜你,T30 Pro可以变得更加小巧,自动化程度也更高。
自动上下水模块真的是良心推荐,以后大家新房装修、老房改造一定要预留扫地机器人的水电位置。自动上下水提升的用户体验非常高。
然后就是可拆卸的基站底座,科沃斯之前的型号大多数基站底部不可拆卸,冲洗时需要弯腰非常不方便,这一点被很多网友在我评论区吐槽过。
这次T30的基站改进了,非常方便,抽出冲洗完再插回去。
尘袋方面还是大容量尘袋,没什么好说的,保持了以前的优质水准。
2、万Pa吸力
吸力终究还是卷到万帕了,路过即吸走,没什么好说的。
我个人还是建议这个指标的重要性,大家放到靠后的位置。同价位,这个指标高当然是好,但是没有必要为了这个指标而增加自己的预算费用。

3、智能复拖,减少人工干预
系统自动识别地面脏污程度,根据划分程度,会选择复投一次或者两次,减少了人工设定、人工干预的动作。
这个功能非常实用,我们不再需要去人工设定某个区域二次、三次清洁了。
4、全链路热水清洗
机器人每次返回基站会往电控水箱注入70℃热水,拖的时候就是热水拖地效果。
这里可以看到,机器人拖过之后的地面仍然还有约36℃左右的余温,效果对比冷水拖地还是很明显。
热水拖地对于顽固污渍有很好的清洁效果,这个大家都懂。除此之外,对于一部分常见菌毒也有消杀的作用。

机器人返回基站进行拖布自清洁时,也是热水洗拖布,这里测试了拖布处的水温,最高温度可以达到近80℃,这么高的水温拖布清洗效果更好,同时对拖布、基站底部也有消杀的效果,一箭双雕。
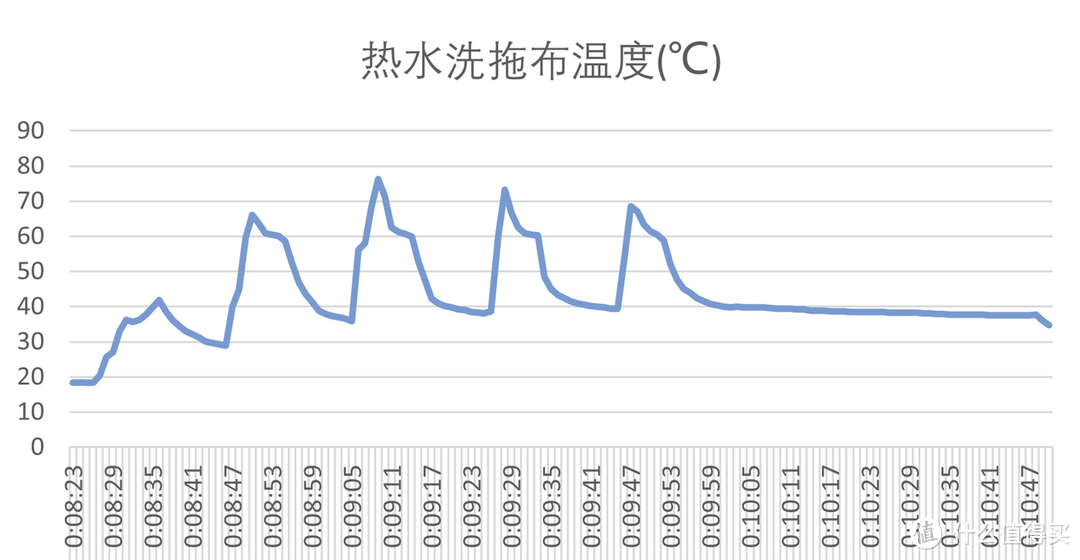
热水洗完之后拖布的余温也还有44℃左右,表明在清洗时真的可以达到高温。

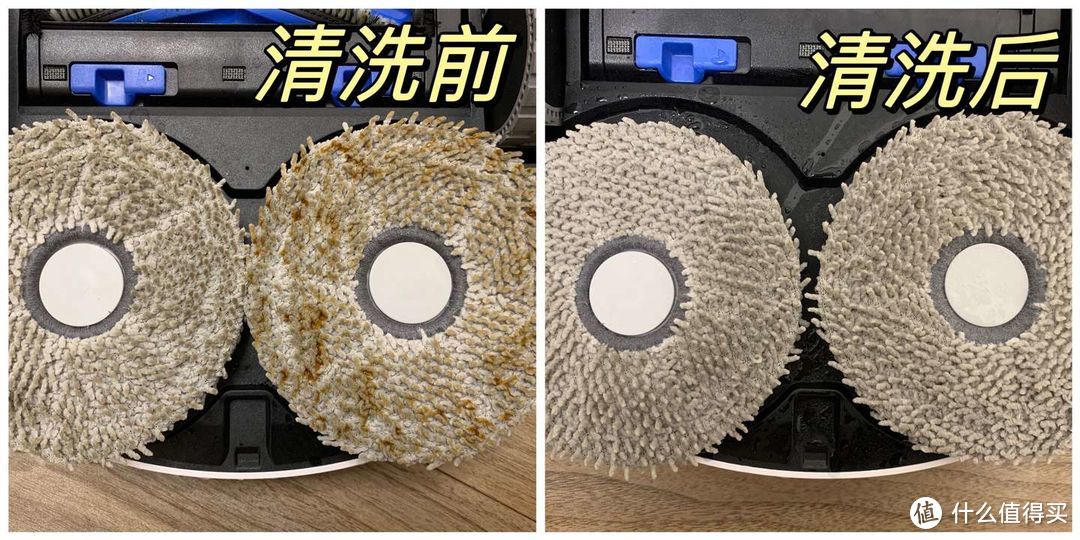
自清洁的效果,没话说,刚才测试智能复拖的污渍,一次就清洗干净了,大家可以看看自清洁前后的对比效果。
自清洁结束是热风烘干,烘干效果如下所示。有效避免拖布长时间潮湿,导致滋生细菌、生长小强的问题。
避障、越障、地毯拖布自动抬升这些常规的功能测试,我也顺手拍了一下,大家顺便看看,都没什么问题。


六、体验测评小结
到了小结环节,这么说吧,近两年来,这是科沃斯再次让我兴奋、惊喜的一次(上一次还是科沃斯率先推出dToF技术让扫地机器人从随机碰撞避障提升到路径规划避障的时候)。
在2023年我看到机械臂、割毛滚刷、热水拖地这些巧妙功能设计的时候,我差点以为扫地机器人可能也快卷到头了。
完全没想到在2024年初,科沃斯T30的TruEdge灵隙灵动恒贴边技术让我知道自己草率了。要知道,0到60分容易,60到80分也不难,但80到90分缺是极不容易的。我认为TruEdge灵隙灵动恒贴边技术就是一项80到90分的技术,是极致提升用户体验感的。
一个步进电机的使用,就创新出了无级悬停机械臂这个巧思,从物理结构上保证了灵动恒贴边的可能性;
得益于科沃斯成熟深厚的技术积累,避障策略设计得十分自信,大小障碍物、墙边都可以让无级悬停机械臂始终保持紧贴,并且稳定性、一致性很不错,贴不到的情况很少。
同时,另一个亮点Zero Tangle灵缠双梳齿防缠绕技术通过V型胶毛一体滚刷+吸口梳齿结构,能够很好的减少毛发缠绕概率,减少了我们人手处理的频次。
其他的万Pa吸力、全链路热水热风、避障、越障等功能,都保持了一贯的高水准。
综合而言,科沃斯T30我可以断定,是2024年一款非常值得入手的机器,2024年再卷也不过如此了。













AI小值-家用电器
校验提示文案
动感超人不感动
校验提示文案
crazybai
校验提示文案
crazybai
校验提示文案
动感超人不感动
校验提示文案
AI小值-家用电器
校验提示文案